航天器姿态大角度机动有限时间控制
2020-09-14邓立为
黄 成,王 岩,邓立为
(1. 哈尔滨理工大学自动化学院,哈尔滨150080;2. 哈尔滨工业大学控制科学与工程系,哈尔滨150001)
0 引 言
航天器姿态控制技术在交会对接、在轨装配、绕飞和编队飞行等太空任务中有广泛的应用,是顺利完成各项任务的关键因素。近年来,为进一步提高航天器姿态控制精度,特别是确保姿态大角度机动时的稳定性与鲁棒性,许多非线性控制方法得到了广泛研究和应用,如渐进稳定控制[1]、鲁棒次优控制[2]、基于线性矩阵不等式的非线性控制[3]和逆最优自适应控制[4]等。这些方法都能够很好地解决航天器姿态系统的非线性控制问题,但忽略了系统状态的有限时间收敛性。因此,为了满足空间任务的快速性要求和实现航天器更高的可操作性,具有有限时间收敛和非线性等特性的有限时间控制方法被广泛应用到航天器姿态控制领域[5]。
齐次性原理常被用于航天器姿态有限时间控制器的设计。文献[6]利用有限时间观测器,针对航天器角速度不可测量的情况设计了有限时间输出反馈姿态跟踪控制器。进一步地,文献[7]针对编队飞行航天器,设计了分布的有限时间输出反馈姿态协同控制器。考虑执行器的物理限制,文献[8]设计了具有饱和特性的航天器姿态稳定有限时间控制器。为了更好地处理系统所受的外部扰动,终端滑模控制理论常被应用于航天器姿态有限时间控制器的设计。文献[9-11]利用终端滑模控制方法设计了航天器有限时间姿态控制器。为了解决终端滑模控制奇异的问题,文献[12-13]设计了基于非奇异终端滑模面的航天器有限时间姿态控制器。进一步地,为了解决终端滑模控制在远离平衡点时收敛速度慢的问题,文献[14]设计了基于快速终端滑模面和双闭环结构的有限时间姿态位置耦合控制器;文献[15]针对刚柔耦合卫星设计了有限时间输出反馈姿态控制器;文献[16]设计了快速非奇异终端滑模面,并应用到航天器姿态有限时间控制。刚性航天器姿态系统是一个标准的级联系统,反步法作为一种应用于级联系统的强大设计工具,在处理该类系统控制问题时具有很大的优势,常被用于航天器姿态有限时间控制器的设计。文献[17]利用自适应预测和反步法设计了微型航天器有限时间姿态控制器。进一步地,文献[18-19]利用有限时间观测器和反步法设计了有限时间输出反馈姿态跟踪控制器。
虽然上述研究都采用数值仿真手段对控制方法进行了校验,但是鉴于空间任务的特殊性,在航天器进入太空之前,必须对其控制方法和系统进行严格的地面物理仿真试验。因此,为了更真实地检验控制方法的可行性和有效性,有关地面物理仿真试验的研究必不可少。文献[20]和文献[21]分别应用三自由度气浮台物理仿真系统和五自由度气浮台物理仿真系统对航天器控制问题进行了物理仿真试验研究。文献[22]将最优滑模控制方法应用到六自由度气浮仿真试验台上。
考虑太空任务的特殊性和现代航天器姿态大角度机动任务对快速收敛性的需求,根据基于反步法的有限时间控制与基于快速终端滑模的有限时间控制相比在动态响应速度方面的优越性[23],本文设计了连续的自适应反步有限时间姿态大角度机动控制器,并将该控制方法应用到某型号航天器交会对接全物理仿真试验中,通过试验来验证方法的可行性。与现有文献相比,本文研究的创新点在于:1)考虑系统受到外部扰动,利用改进的自适应律进行估计,并保证控制器的连续性;2)对设计的控制方法进行全物理仿真试验和对比试验,验证其可行性和有效性,进而提高方法的可应用价值。
本文首先给出了航天器姿态控制模型;然后设计了鲁棒的有限时间控制器,并给出了相应的证明;最后,通过数值仿真表明了控制方法的有限时间稳定性和有效性,并进一步将控制方法应用到全物理仿真试验,校验了其可行性和有效性。
1 航天器姿态控制模型
旋转矩阵描述方式能够避免欧拉角描述方式的奇异问题发生,基于旋转矩阵的航天器姿态运动学和动力学模型为
(1)
(2)
(3)
式中:Rc∈SO(3)表示航天器姿态从本体坐标系到惯性坐标系的旋转矩阵;ωc∈R3×1为航天器姿态角速度在本体坐标系下的表示;Jc∈R3×3为航天器的转动惯量矩阵;u∈R3×1和d∈R3×1分别为航天器的控制力矩和扰动力矩在本体坐标系下的表示。

姿态误差Re为矩阵,很难应用到控制器的设计中,本文采用文献[24]构造的一种姿态误差表示形式
(4)
式中:tr(Re)表示Re的迹,“∨”表示叉乘的逆运算:SO(3)→R3×1。

(5)
(6)
(7)
(8)

2 控制器设计
本文利用反步法的思想设计航天器姿态大角度机动有限时间控制器,下面给出设计控制器时要用到的相关引理和假设。


1)V为正定函数。

引理3[16].Β是正定对称矩阵,λmin和λmax分别为矩阵B特征值中的最小值和最大值,对于x∈R3×1,有λminxTx≤xTΒx≤λmaxxTx成立。

1)V为正定函数。


引入如下变量
(9)
第一步,根据反步法的设计思路,同时为了保证姿态误差e始终定义在集合L中,选取虚拟控制器为
(10)
f(x1,i)=
(11)

证. 选择李雅普诺夫函数
(12)
(13)
根据引理1,结合式(11)可得
当|x1,i|≤η,i=1,2,3时,
-2(β1+β2r1)V1,i
(14)
当|x1,i|>η,i=1,2,3时,
(15)
根据引理2可知,x1,i在有限时间内可收敛到区域|x1,i|≤η。
第二步,基于虚拟控制器(10),设计连续控制器和自适应更新律如下
(16)
(17)

选择李雅普诺夫函数
(18)
对其沿着系统轨迹求导
(19)
代入式(16)~(17),结合引理1和引理3整理得

(20)


uz=u-k2sig(x2)γ
(21)
定理1. 针对航天器姿态系统(5)~(6),基于假设1,利用有限时间控制器(21)和自适应律(17),可以实现如下目标:
1) 状态x1和x2是实际有限时间收敛的;
2) 角速度误差ωe是实际有限时间收敛的。
证.考虑李雅普诺夫函数V2,对其沿着系统轨迹求导
当|x1,i|>η时,

(22)
式中:
当|x1,i|<η时,即x1已经在收敛域|x1,i|<η内,则

(23)

根据式(9)~(10),角速度误差ωe可以表示为
ωe=x2-β1E-1x1-β2E-1f(x1)+
(24)
因为状态x1和x2是实际有限时间收敛的,可以得到角速度误差ωe是实际有限时间收敛的。问题(2)得证。
3 仿真校验
3.1 数值仿真
为了校验所提出控制器的有效性,本节进行姿态大角度机动有限时间控制数值仿真,方案如下:航天器从初始姿态机动到横滚角20°,俯仰角0°,偏航角0°的目标姿态,分别与图中姿态向量的第1、第2、第3个元素相对应,并保持稳定,机动稳定时间满足t<30 s。为了校验所提出控制方法在动态响应速度方面的优越性,采用基于快速终端滑模的有限时间控制方法[23]进行对比仿真。
根据全物理仿真系统的实际物理参数,航天器转动惯量为
航天器姿态和角速度的初始值选择为
[φ,δ,ϑ]T=
[-0.00012, 0.00023935, -0.000234521]Trad
ωc(0)=
根据沃兹和尼尔森的研究结论,本次实验确定采用5名被试对象。研究者在与汽车相关的专业班级中筛选出5名学生作为测试对象。这些学生都掌握电脑基本操作,视力正常(或矫正视力正常),愿意安排时间参与本项实验研究。
[0.0000536, -0.000101725, 0.0000957]Trad/s
外部扰动力矩选择为
d=0.002[sin(0.1t),cos(0.2t),sin(0.2t)]TN·m


图1 姿态曲线

图2 角速度曲线
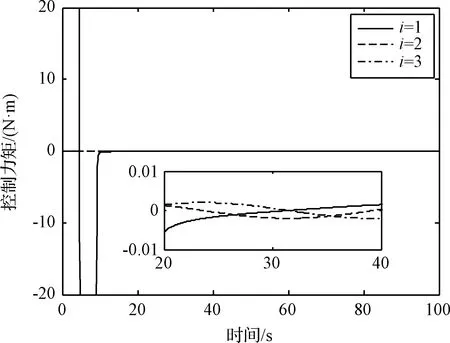
图3 控制力矩曲线

图4 ψi估计值曲线
图5~图7是基于快速终端滑模的有限时间控制器作用下的闭环系统响应曲线,从图5~图7可以看出该控制方法准确、快速地完成了姿态大角度机动任务。由图5~图7和图1~图3的对比可知,在控制输入相近的情况下,基于反步法的有限时间控制器和基于快速终端滑模的有限时间控制器作用下的闭环系统收敛性能基本相同,前者的动态响应速度更快,更适合姿态大角度机动控制。
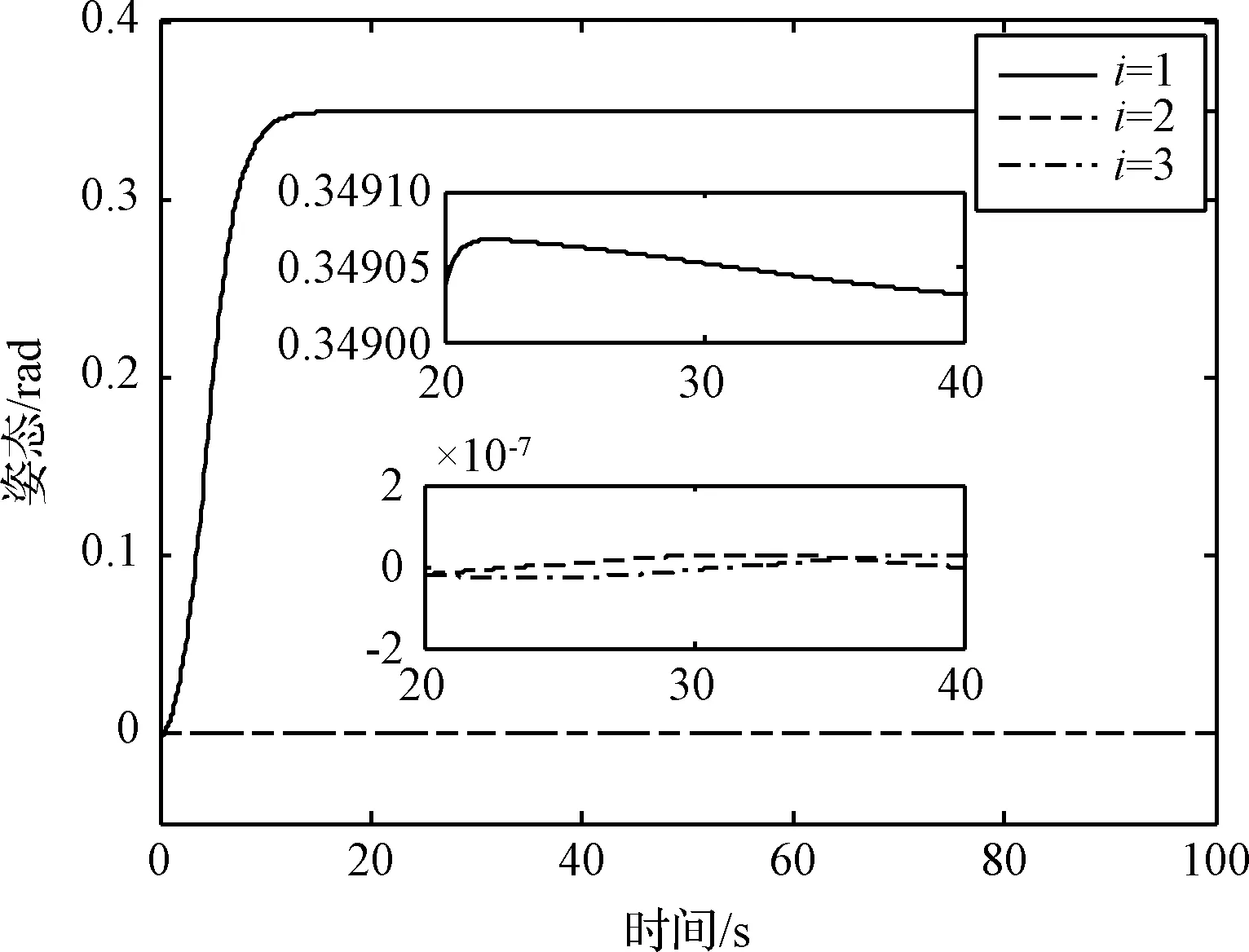
图5 对比仿真姿态曲线

图6 对比仿真角速度曲线
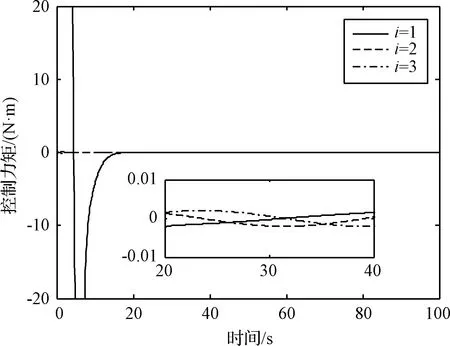
图7 对比仿真控制力矩曲线
3.2 全物理仿真试验
本节在全物理仿真系统上进行航天器姿态大角度机动控制全物理仿真试验,试验方案同上,执行机构为控制力矩陀螺群。另外,为了验证所提出有限时间控制方法的可实际应用性,采用工程上常用的PD控制方法进行对比试验。
有限时间控制方法的试验结果如图8~图10所示。从图8和图9可以看出,系统机动轴的动态响应过程很快,机动稳定时间为26 s左右,两个非机动轴动态响应过程平稳,没有出现由耦合干扰而引起的抖振现象。

图8 姿态试验曲线

图9 角速度试验曲线

图10 控制力矩试验曲线
从图8和图9中还可以看出,稳态阶段姿态和角速度都出现了轻微的抖振现象,这是因为随着控制输入的减弱,此时系统噪声的影响显著提高。在数值仿真中,由于没有考虑噪声的影响,所以在稳态阶段未出现上述抖振现象。图10为控制力矩试验曲线。
PD控制方法的试验结果如图11~图13所示。将图11~图12与图8~图9进行对比可知,两种控制方法作用下的机动轴稳态指向精度基本相同,而有限时间控制所需的机动时间更短。将图13与图10进行对比可知,有限时间控制方法作用下的执行机构输出最大控制力矩的时间相对较长,调整时间相对较短。

图13 PD控制下控制力矩试验曲线

图12 PD控制下角速度试验曲线
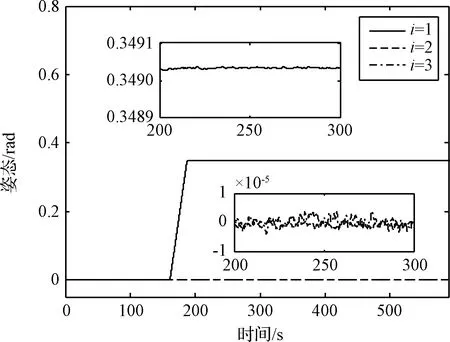
图11 PD控制下姿态试验曲线
表1和表2给出了姿态机动任务的调节时间、稳态时姿态指向精度和稳态时姿态稳定度,说明两种控制方法的技术指标都满足试验要求,稳态时姿态指向精度和稳态时姿态稳定度基本相同。另外,与PD控制方法相比,有限时间控制方法所需的调节时间更短。

表1 调节时间

表2 技术指标
4 结 论
本文采用反步法研究了航天器姿态大角度机动有限时间控制问题。所设计的有限时间控制器实现了航天器姿态机动系统的有限时间收敛,自适应律在完成了对外部扰动估计的同时保证了控制器的连续性。仿真结果表明了所提出控制方法的有效性,全物理仿真试验进一步校验了方法的有效性和优越性。
