四驱式直流无刷电机小车的设计
2020-09-10郭竞成陈志超胡林王倪珂
郭竞成 陈志超 胡林 王倪珂
摘要:本文是针对于运输速度而设计可全地形快速运动的小车,以麦克纳姆轮式四驱小车的直流无刷电机为控制对象,采用CAN总线的通讯协议控制控制编码电机进行控制小车,以STM32F407单片机作为数据处理中心,通过PID调节电机的转速和工作状态,设计出可以灵活运动的四驱式直流无刷电机小车。安装小车成功后,小车运动速度比传统运输小车快而且可以全方位移动。
Abstract: This article is designed for the transportation speed and can be used for all-terrain fast-moving trolley. The brushless DC motor of Mecanum wheeled four-wheel drive trolley is used as the control object. The CAN bus communication protocol is used to control the control motor to control the trolley. The single-chip microcomputer is used as a data processing center, and the speed and working state of the motor are adjusted by PID to design a four-wheel drive DC brushless motor cart that can be flexibly moved. After the trolley is successfully installed, the trolley can move much faster than the traditional transport trolley.
关键词:直流电机;CAN总线;PID控制;麦克纳姆轮
Key words: DC Motor;CAN bus;PID control;Mecanum wheel
1 四驱式小车背景与研究现况
随着科技水平的不断提高,微电子和电机技术的结合取得了巨大成就,电力将成为未来汽车的主要能源,实现电机转速的高速精确控制显得尤为重要。电动汽车在各行各业开始展露头角的发展,许多科研机构和技术工作者对小车的驱动控制系统出了自己设计方法。如今两驱系统的小车研究已经趋近完善,但是四驱系统的小车构建还有很大的发展空间,同时我国越来越重视提升大中小学生的科技创新能力,由于四驱式小车包含多学科知识点,可以让学生综合运用到多门学科的知识,而且在课堂上学的理论知识,在实际科研任务里也能有所发挥。因此笔者构建四驱式直流无刷电机小车。
2 四驱小车结构设计
2.1 总体结构设计
利用麦克纳姆轮底盘结构设计出四驱式直流无刷电机小车,通过编码电机带动麦克纳姆轮灵活运动,采用STM32F407单片机集中控制和分散模块设计,采用keil编写控制程序,通过CAN总线小车控制底盘编码小车电机,利用增量式PID调节稳定直流无刷电机转速,保证4个直流无数电机控制的麦克纳姆轮的转速无限接近来确保小车底盘的稳定性。通过整合功能部件,使各个机构紧密相连划分功能区域完善整体性,通过程序的调度优化小车的运动性能,在运动的同时保证车身的稳定性。
2.2 电源结构设计
通过24V锂电池作为主电池,采用并联的方式对4个+24V的直流无刷电机进行供电,利用LM317、二极管、电容、电阻等器件设计出24V转5V的电源变换系统,通过稳压片给stm32F407进行供电运行,输入电源电压为5V。由于STM32F407上自带有5V转换3.7V的电压变换器,所以利用单片机直接与通讯设备进行供电。
2.3 底盘结构设计
因为对于设计的小车中应当灵活运动,故使用麦克纳姆轮内部结构。利用四个直流无刷电机,并能有效使麦克纳姆轮的旋转,就可以实现前进、平移、后退、旋转以及其他复杂运动,基本上实现全方位的移动。
3 驱动系统设计
目前市面上的通讯协议有较为传统RS485通讯协议和CAN总线通讯协议。我们选用的CAN总线有着很大的优势。
①总线使用率之上,使用单主从内部结构的RS485时一个总线之上只能联接一台主机,通讯均是由它们发起的,发送命令时需要等到发送完,收到回应信号后,主机才能够向下一个节点进行发送信号,这样做的目的是为了防止多个节点向总线发送数据而导致總线的发生混乱等。然而多主从内部结构的CAN总线不一样,在CAN总线中的每一个结点均有CAN控制器,这样的多个结点同时向外发送信号,输出的时候对于各个不同信号源展开编纂ID号,以发送的ID号展开仲裁,选择对应的ID号展开接收,这个一个节点可以马上探测到总线的空余,也迅速的发送,这样就省去了主机的询问时间,提高了总线的利用效率[1]。因此对于四驱式直流无刷电机的控制情况CAN总线是比RS485更好的通讯协议。
②对于错误的测试制度,RS485仅仅规定了物理层,而是没数据链路层,因此对发生的错误是无法展开辨别的,除非是一些短路等物理错误,这样的情况在一个节点破坏了,就会造成整个总线的瘫痪。然而CAN总线有CAN总线的芯片,可以对于总线的任何错误展开监测,自动转换错误的状态,适时的关闭总线,进而维护总线。所以在网络安全性能上,CAN总线无疑比RS485更好。
考虑到四驱小车中同步运动关系复杂,总线的选择选用CAN总线。为了实现4个直流无刷电机同时控制的复杂关系,在CAN总线上,接有与4个直流无刷电机的主控制器的伺服驱动器,在配有CAN总线控制以及收发器的通讯适配卡的传感器以及伺服电机之上,各个伺服电机可以单片机通讯,这样的传输更为便捷、快捷而且因为有ID号的原因,每一伺服电机脉冲之间基本没有干扰。控制器向各个伺服单元发送控制指令和位置到达指令的时候,各个伺服电机的状态信息可以实时的反馈给传达到控制器,按照所接受信息在需要的时候实时地修改并纠正伺服参数,各个伺服驱动器可以通过这些参数输出PWM信号给直流无刷电机进行运动。
4 控制系统设计
增量式PID调节分析,对于数字信号展开的模拟PID而是展开控制,能叫做连续PID控制,函数称为:
式中,u(t)为PID调节器的输出;e(t)是PID调节器的误差,Kp是份额回归系数,Ti是积分时间常数,TD是函数时间常数。
通过对u(t)的拉式变换后可以得出PID控制器的传递函数。
对于连续PID控制以一定离散化办法离散之后便可以获得数字化PID控制,离散的实质是采样,假设采样为周期采样,采样周期为T,离散自变量为n,再根据位置式PID控制公式,写出n-1时刻的控制量:
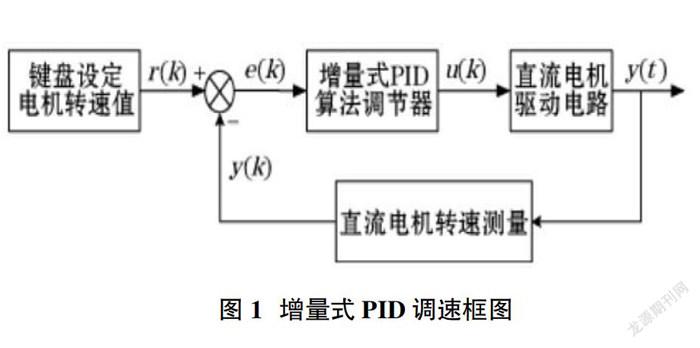
在确定控制增量的时候需要知道系数Kp、Ki、Kd和前3次偏差采样值。图1为增量式PID调速框图[2]。增量式PID步骤仅需要算出控制增量,所得结果误差小,控制量相对稳定,所以非常适合直流电机调速系统。
5 运动原理
采用麦克纳姆轮式的四驱式直流无刷电机小车,麦克纳姆轮的简称是“麦轮”。是一种可以进行全方位任意移动的轮子。它由轮毂及围绕轮毂的辊子组合而成,理论上麦克纳姆轮得辊子轴线和轮毂轴线可以形成任意的夹角,但是现在普遍使用的都是45°夹角。辊子分布在轮毂的轮缘上,这些斜向的小车轮是可以顺着倾斜角展开横向滑移。辊子也是一种没有驱动力的小滚子,因此可以任意转动,滚子的母线十分独特,车轮绕着固定的轮心轴旋转的时候,每一个滚子的接触面是为一定曲度的圆柱面,因而小车轮子能够连续地沿一个方向旋转。由四个这种轮相互配合,组合,就可使设备实现任意方位运动[3]。
同时系统所有轮都是驱动轮,通过CAN总线通讯方式,以增量式PID调节电机转速,不仅能实现全方位运动,且驱动性能较好。相比于传统的舵机小车更有优势。
6 總结及展望
采用STM32F407为中央处理器,以直流无刷电机作为控制对象,利用CAN总线控制4个电机进行调速,这个方法是建立小功率直流电机控制系统能够对24V直流电机在多个速度状态进行设计。
本次设计的麦克纳姆轮式的四驱式直流无刷电机小车,不仅仅可以精准高效的控制移动和全方位运动,在速度上比传统小车有着巨大的优势,可以在多个不同的地段进行运动。同时,通过完成该四驱式小车的设计制作过程,可以锻炼学生的团结合作能力,应用机械设计、控制原理等多门课程的知识点。是当前和未来新能源汽车的道路,可以通过以当前的四驱控制可以通过功率放大和改进设计来实现。
参考文献:
[1]田克君,陈虎.基于CAN总线的多伺服电机同步控制[J].微计算机信息,2007,23(24):40-42.
[2]林海波,王晓曦,刘奭昕.一种基于增量式字PID算法的智能温度控制器[J].长春工程学院学报(自然科学版),2011,12(3):86-89.
[3]朱磊磊,陈军.轮式移动机器人研究综述[J].机床与液压,2009,37(8):242-250.
作者简介:郭竞成(1999-),男,山西平遥人,本科在读,研究方向为机器人工程。
