汽车主动悬架系统的控制技术探析
2020-09-10孟源
摘要:悬架系统作为汽车底盘的主要组成部分,它的性能直接影响到车辆的平顺性及操作稳定性。本文对主动悬架系统不同的控制技术进行了整理,而各种不同的控制技术并不独立,各自之间有一定的关联。目前悬架系统由原来的被动悬架技术向主动悬架系统进行转移,本文为研究主动悬架系统的人员提供一定的参考。
关键词:主动悬架系统;控制技术;应用
0 引言
人类文明的进步促使着人类对生活质量的要求越来越高。对于中国制造而言,也提出了进一步的要求,由之前可简单实现功能转为更精确的、更智能的实现该功能。继2007年开始以来,中国的年汽车销售量及全国汽车拥有量变为全球第一,在这样一个庞大数量的影响下,也对该行业提出了更高的性能质量要求,其中的影响指标有平顺性、舒适性等,而为了提高这些性能指标,我们在悬架系统中应用了一些电控技术。
对于悬架系统,通过专家们的理论分析、模拟仿真、工况测试等理论结合实际的方法,悬架系统逐渐的从纯机械控制到电控再到人工智能。现在我国电控悬架系统即主动悬架系统的技术越来越成熟,那么下边我们对主动悬架系统中所涉及到的技术及应用做出浅谈。
1 汽車主动悬架系统的分析
车辆稳定性及平顺性难以在传统的被动悬架系统中达到一种最佳状态,而主动悬架系统可相对达到这一最佳状态。主动悬架系统中包含了传感器、电子控制单元及执行器。传感器可以将车速及车身高度以电信号的形式传回电子控制单元,通过电子控制单元的逻辑分析(依据控制算法理论)让相关执行器去进行工作以达到最佳的运行状况,主动悬架系统可以根据不同的工况去进行实时的、精确的控制阻尼力及弹簧刚度,从而保证运行过程中的平顺性及操作稳定性。主动悬架系统一般只运用在较高档的汽车中,常采用空气弹簧(通过在橡胶气囊弹性元件中充、放不同量的空气来改变该元件的刚度)。
市面上较为便宜的车中常采用被动悬架技术,这种线性控制技术,主要由刚性弹簧和液压减振器组成,刚性弹簧主要起连接和导向作用,振动能量主要由液压减振器中液压油流过阀芯所产的阻尼力来吸收掉。该技术相对比较成熟,造价较低;弊端就是相关参数一旦确定之后无法改变,在大部分工况中无法同时满足平顺性及操纵性要求,直接影响车辆运行的整体性能。
由于主动悬架系统结构复杂,造价高,并且其消极悬架系统满足不了所有工况的要求,所以在一些客车上常采用半主动悬架系统。该系统具有比较好的灵活性,其主要通过弹簧压缩量来测算车速,最终来选择合适的刚度值及最优阻尼力,其结构组成和被动悬架系统一致,只是减振器的阀芯口径可以改变,通过其改变来控制阻尼力的大小,完成最优控制。
根据所了解的文献中得知,虽说轮胎的垂向阻尼特性在绝大多数工况下对轮胎的垂直刚度影响很小,但在汽车极限的特殊工况下还是有一定的研究价值。一些专家提出了轮胎阻尼特性影响簧上质量,在理想工况下可以将簧上质量的垂直加速度值降低约百分之三十。而汽车悬架系统是主要影响汽车平顺性、稳定性及舒适性的结构。悬架系统设计的好坏会影响到悬架动变形量、车体垂直加速度及轮胎动载荷。大量的文献表明主动悬架系统能减小车辆的垂向振幅、具有更小的功率谱密度从而实现更好的运行平顺性及操作稳定性。
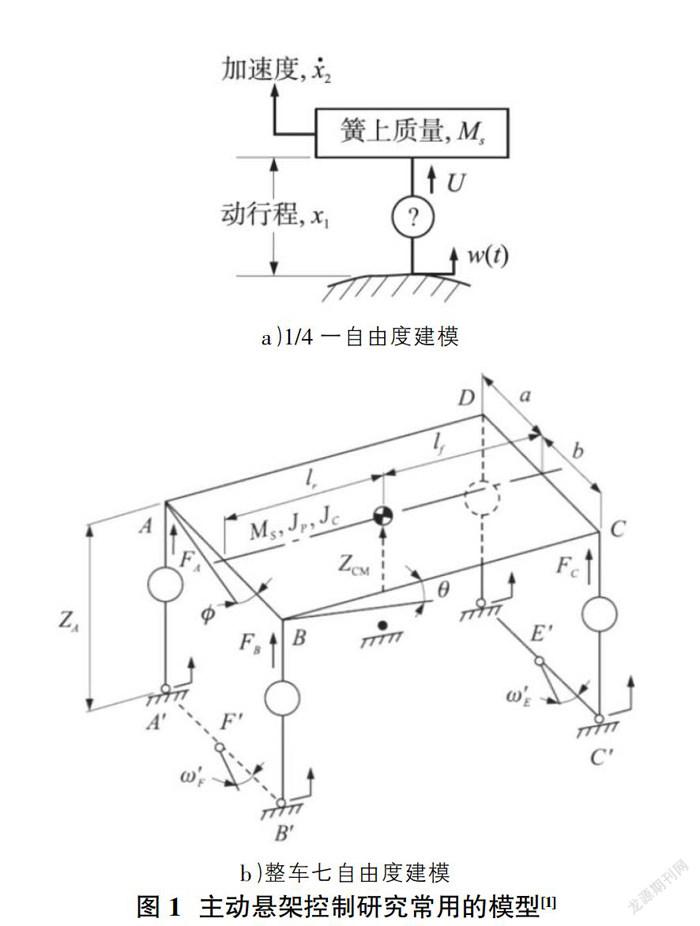
关于主动悬架系统的理论性研究是从1/4一自由度建模逐渐到整车七自由度建模,虽说1/4一自由度建模具有很大的局限性,但由于其简单,故而在设计一些新的悬架系统中广泛应用。建模如图1所示。
2 控制算法在汽车主动悬架系统的应用
汽车主动悬架系统中包含有电子控制单元,而它是要通过传感器实时感知并传送车辆运行的实际工况,进而进行数据分析及相关运算,这种运算就是依据于文中提到的控制算法,该控制算法包含了自适应与自校正控制、模糊控制、神经网络控制、预见控制、随机线性最优控制、鲁棒控制。也就是运用不同的控制规律和模型所对应出来不同的悬架特性,从而选出对整车平顺性及操作稳定性最优的一种。
2.1 随机线性最优控制 随机线性最优控制是由于路面对车轮的激励是一随机过程,他的理论依据就是线性二次高斯控制,由于其不必知道要求的性能参数去明确闭环极点所处位置,可以通过响应曲线得知最佳状态及控制变量的相关数学模型,得出输出参数,故而大多采用在控制策略的设计当中。该数学模型的建模一般是依据于工作经验所得,由于输入参数的种类比较多,所以也对技术管理人员提出了更高的要求,要求其对输入参数进行解析,最终实现减振效果的提升。在达到最优控制之后,还应该及时地对该系统的反馈进行收集并作出进一步优化升级,进一步去完善该系统的性能。
2.2 模糊控制 随机线性最优控制是依据于经验进行建模,该模型较为复杂,控制效果不是很理想,而模糊控制不需要建立太精确的模型,所以也减小了建模时所产生的误差,把多个变量参数进行了范围规定,所以应用该控制技术可以减少电子控制单元的存储空间,费用降低。该系统可以提高响应效率,使得控制更加高效,但控制不是很精确。文献中查得使用该控制技术,即使车辆运行在极为不平整路面时,悬架的可靠性较好,同时执行器也在可靠地工作范围内。所以该控制技术在汽车设计中广泛采用,同时有利于人工智的优化。
2.3 神经网络控制 该控制技术在人工智能时代逐渐引起人们的重视,该技术是一种具有并行分布式特点的处理系统,可以像人类一样进行分析处理问题,它可以独立的通过传感器进行知识的获取,分析这些知识有无关联性,把具有关联性的知识进行存储记忆,故而他有良好的自适应性、容错性及推理能力。该电子控制单元通过一次次的学习可以提高该单元的推理分析能力,从而使得主动悬架系统的控制越来越趋于期望值。该技术有着很优越的减振效果,也有着很大的发展空间,厂家技术人员通过对行驶工况进行数据积累及分析,极力地提高该技术的控制优越性,使该技术得到更广泛的应用。
2.4 自适应与自校正控制 自适应与自校正控制技术是将传感器搜集到的信息传输到电子控制单元中,然后与寄存器中存储的参数中选择与当前传输进来最接近的参数,然后对执行器进行控制。正常情况下,该技术可依据不同的输入参数进行自适应调整及控制,但在较复杂工况时,该技术控制精度不高,运算较为复杂,而为实现较为精确地控制,寄存器中存储信息量较为庞大。而输入的参数受路面激励及车辆自身参数变化的影响,所以输入参数不能及时、精确地输入,故而在实际复杂的工况下,该控制技术下的电子控制单元的控制精度及响应性会极大地降低。
2.5 预见控制 该控制技术是采用超声波传感器提前获知运行前方路面谱信息,由于电控单元提前获知路面参数,就可以提前进行数据分析,提前响应,也能提高控制精度,该控制技术在汽车上没有得到广泛应用,但在列车系统进行了运用,效果也较为显著。
2.6 鲁棒控制 该控制技术是对上述控制方法所存在的缺陷如数学模型误差、输入参数实时变化等进行改进,是对控制系统保证闭环回路稳定的条件下对其不确定性进行优化处理,文献中也提到了,无论是1/4一自由度模型还是整车七自由度模型在采用鲁棒控制技术之后都提高了输入参数的精度从而完成执行器的精确控制。
3 结束语
汽车主动悬架系统所面临的挑战依然很多,实现人工智能的路程还很远,需要大量的路试数据的积累,同时还受制造成本的约束。从长远来看,主动悬架系统需要在传感器技术、电子控制单元技术及智能执行器之间进行完美的结合才能更好地实现车辆平顺性及稳定性。
参考文献:
[1]Hrovat D.Survey of advanced suspension developments and related optimal control applications[J].Automatica, 1997,33 (10): 1781-1817.
[2]赵永强,何长安.基于神经网络自适应控制的主动悬挂系统[J].计算机仿真,2003,20(1).
[3]陈鑫,兰凤崇,陈吉清,等.微型电动汽车悬架系统设计与平顺性分析[J].重庆理工大学学报(自然科学),2018,32(8):24-31.
[4]桑楠,魏民祥.车辆主动前轮转向与主动悬架的自抗扰控制方法[J].南京理工大学学报,2017,41(2):165-172.
[5]王红,邱官升.汽车电控悬架系统检修关键技术研究[J].技术交流,2019,35(6):153-155.
[6]来飞,胡博.汽车主动悬架技术的研究现状[J].南京理工大学学报,2019,43(4):519-526.
[7]黃镇财.汽车悬架系统电控减振技术应用探析[J].内燃机与配件,2019,19:38-39.
[8]陈鹏.汽车悬架系统电控减振技术及应用[J].时代汽车,2018,296(05):119-120.
[9]刘海妹,倪彰,贝绍轶,等.电动汽车主动悬架系统阻尼可调减振器设计及固有频率试验[J].西南大学学报(自然科学版),2017,39(10):147-154.
[10]王莹.汽车主动悬架系统及其鲁棒控制研究[J].广东工业大学,2005.
基金项目:天地科技创新创业资金专项(2018-TD-QN035)。
作者简介:孟源(1988-),男,山西太原人,硕士研究生,讲师,2014年毕业于太原理工大学,长期从事车辆底盘等方面的教学及科研工作。
