搬运机械手结构设计
2020-09-10骆晨
骆晨

摘 要:本文的控制对象是由三个操纵器组成的一组操纵器。每个机械手完成八个基本动作,三个机械手相互配合。机械手由气缸驱动,气缸由电磁阀控制。限位开关检测操纵器是否达到固定位置。本文以西门子S7-200系列CPU224为核心,对EM221数字输入模块和EM222继电器输出模块进行了扩展。机械手的开关信号直接输入PLC,PLC通过中间继电器控制电磁阀。在软件方面,设计了主程序和子程序。主程序控制操纵器组动作,子程序控制每个操纵器动作。
关键词:农业机械手;自由度;结构设计
中图分类号:TP241 文献标识码:A
0 引言
机械手最初用于汽车制造业,通常用于焊接、喷漆、装卸和搬运。机械手扩大了人的手、脚和大脑的功能。在危险、有害、有毒、低温、高热的环境中工作,可以替代人类。它可以代替人完成繁重单调的重复性工作,提高劳动生产率,保证产品质量。
1 机械手总体设计
主要由4个大零件和5个液压缸组成的操纵机械手:(1)手使用线性液压缸通过机构的运动来进行手柄的打开和关闭。(2)对于手腕,使用旋转的液压缸将手旋转180°。(3)手臂使用线性液压缸以实现手臂的位移。(4)机体采用线性液压缸和旋转液压缸进行臂的抬升和旋转。
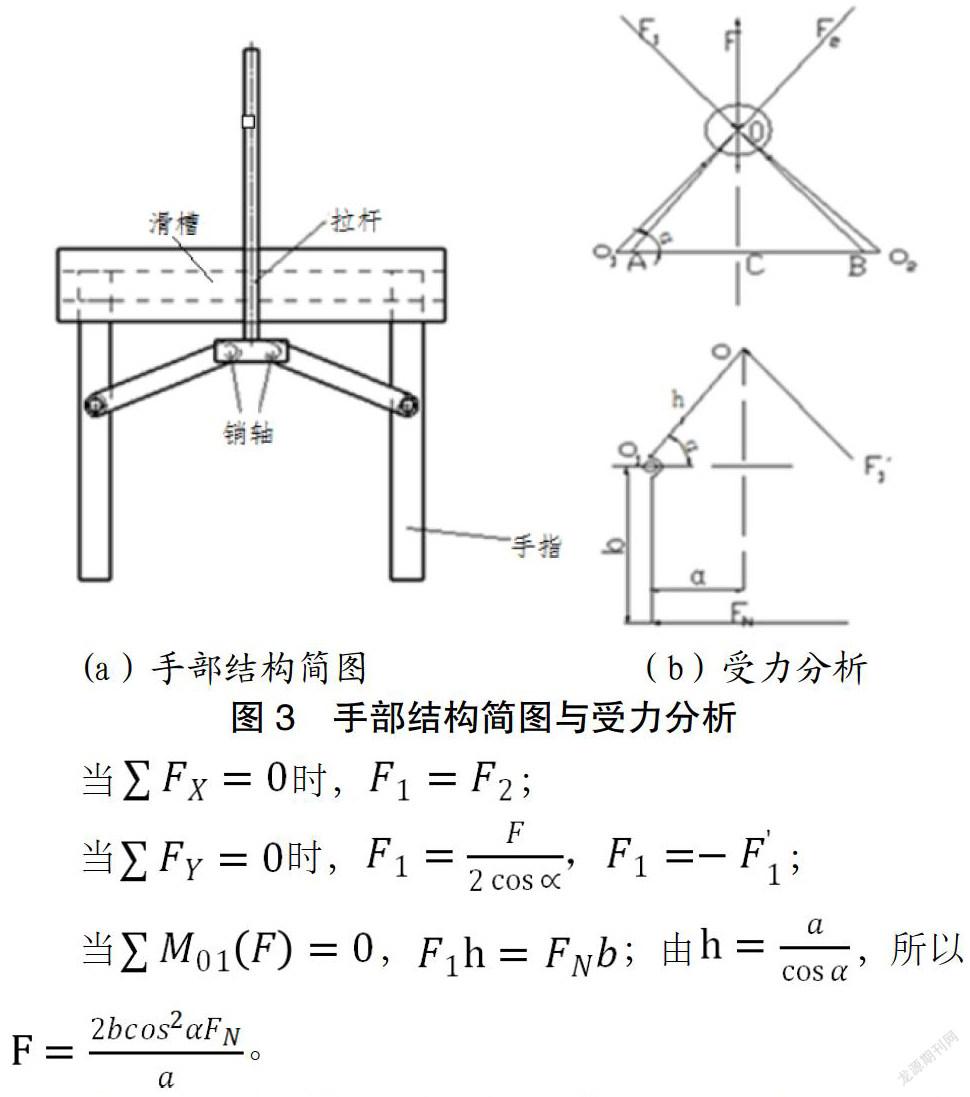
2 手部设计
在拉杆3的作用下,钉子的销钉2的上拉力为F,两个手指1在销钉上的反作用力通过中心点O分别是F1和F2,力的方向跟中心线OO1和OO2平行,交F1和F2的延长线于A及B。
式中a为手指的回转支点到对称中心的距离;为育苗盘手柄被夹紧时手指的销轴方向与两回转支点的夹角。
3 机械手运动分析
3.1 机械手对象的建模
在机械手运动仿真中使用函数来驱动机械手模型。首先,6个关节角度的变化范围要有限制,然后输入匹配角度或调整滑块以更改机器人关节角度,这将改变机器人末端效果集的位置。
3.2 机械手运动学分析
机械手运动学分析处理的元素主要是位置、速度和加速度等与时间的关系。
3.2.1 正问题情况
利用Robotics Toolbox中函数和来处理机械手运动学仿真的正问题情况。
关节坐标系的初始位置,机械手关节的最终位姿由函数控制,则执行将得到机械手末端执行器的齐次坐标变换矩阵。在运动过程中通过函数来捕捉末端执行器的姿态变化轨迹。
手臂的末端在两秒钟内从原始位置移动到[0 pi/2~pi/2000]的空间坐标变化。最终效果的x轴从0.7 m移至0.19 m,y轴不变,而z轴从-0.6 m移至-1.2 m,关节角变化之间的关系在正动力学方程中。
3.2.2 逆问题情况
利用Robotics Toolbox中函数、函数和函数来处理机械手运动学仿真的逆问题情况。
3.3 機械手动力学分析
机械手动力学分析的正问题情况使用Robotics Toolbox中的函数和函数来处理的。
4 结论
控制器由自由度技术的可编程控制器控制,这是机电一体化的现代自动化生产线的重要辅助手段。他可以做到上下,左右和望远镜的三维运动。更适合现代量产和灵活生产。它可以完成物品、材料、机械零件等的运输、搬运、装卸和其他操作。遵循某些控制要求和程序,并在必要时更改程序以更改操作。
参考文献:
[1]范芳蕾,余宏涛,张克义,等.基于PLC的四轴搬运机械手实验装置的研究[J].装备制造技术,2017(10):80-83.
[2]龙创平,陈豪.气动搬运机械手机械结构设计及分析[J].中国设备工程,2018(01):133-134.
[3]李卫民,华雷.注塑机专用取件机械手结构设计[J].机械工程师,2018(07):52-54.
[4]王宇钢,王朝.活塞杆搬运机械手结构设计及运动学仿真[J].装备制造技术,2018(06):5-8.
[5]胡传松.冲床卸料机械手的结构设计与有限元仿真[J].西安文理学院学报(自然科学版),2018,21(05):31-35.
