双层浮筏台架的多通道自适应主动控制仿真及实验
2020-09-10黄驰
黄驰






摘要:浮筏隔振是大型舰艇在减少动力装置的振动中常用的隔振方法,作为被动隔振,其对高频振动的隔振效果显著但是对低频振动的效果不明显。本文针对双层浮筏隔振中对低频振动隔振效果不明显的问题,设计了一款基于FPGA+DSP的双核多通道自适应主动控制器,运用多通道FxLMS(MFxLMS)算法对雙层浮筏隔振平台的低频振动进行主动控制,并取得了显著的控制效果。
关键词:多通道主动控制;控制器;FxLMS;FPGA;DSP
0 引言
动力系统所产生的振动是舰船向外辐射噪声的主要来源。在舰船减振中,最常用的方法是将所有产生振动的装备集中安放在一个公共的筏架上,筏架和船体之间用弹性构件连接,从而产生减振的作用,这种方法即是浮筏隔振[1]。在实际应用中,单层的浮筏隔振效果有限,因此运用双层浮筏即对振动进行两次隔离,能得到更加理想的效果。
传统的浮筏隔振是纯被动式隔振,被动式隔振主要靠浮筏与船体之间的弹性连接构件来吸收振动的能量。但是该类弹性隔振器件对高频振动的隔振效果较为明显,对低频段的振动隔振效果比较有限。为了进一步提升浮阀在低频段的隔振效果,我们采用主被动复合隔振的方法来对低频段的振动进行抑制。主被动复合隔振在原有的被动式隔振的基础上增加了主动执行机构和主动控制算法。主被动复合隔振通过传感器获得需要控制的振动信息,通过控制器对采集到的参考信号进行信号处理,并输出控制信号至功率放大器以驱动主动执行机构(作动器)有针对性的抑制被控对象的振动。主被动复合隔振的优势在于其可以针对特定的频段进行精准控制,在一些特殊领域如船舶的动力装置的减振中,其振动往往是由机械有规律的往复运动而产生的,此时的振动信号就有很强的特征性,在频域中集中在某一个特定的频率附近[2]。此时运用主被动复合隔振就能精准的消去这些特征线谱。在对浮筏进行主动控制时,因为控制面积过大,需要布置多处作动器来抵消浮筏的振动。此时的控制就属于多通道主动控制。
1 双层隔振浮筏系统建模
如图1、图2所示,上层浮筏的几何中心放置一电磁激振器做激励源。上层浮筏与下层浮筏之间由自主设计的混合式电磁隔振器连接,四个混合隔振器分别布置在浮筏几何对称的四个点上。下层浮筏与地面之间由四个纯被动式隔振器连接,其可以简化为弹簧阻尼系统。所以该被控对象可整体简化为弹簧-阻尼双层隔振实验平台,下层隔振平台的加速度信号作为振动控制的评价指标[3]。
2 多通道FxLMS控制算法
多通道FxLMS(MFxLMS)算法是目前运用最多的多通道自适应控制算法,其是在单通道FxLMS算法的基础上,增加了复数位的控制通道并考虑了通道之间互相耦合的情况。设多通道FxLMS自适应控制系统中有I个参考传感器、J个次级作动器、K个误差传感器。设J个主动控制滤波器均为阶数为L的横向FIR滤波器,J*K个次级通道建模均为阶数为M的横向FIR滤波器。所有的数学推导和计算量分析均基于I×J×K结构的多通道自适应控制系统。如图4所示,为了展示多通道自适应控制系统的结构,采用含1个参考信号传感器、2个次级作动器、2个误差传感器的双通道的自适应控制系统[4]。
3 控制器硬件设计
主动控制系统具有响应时间快、采样频率高、多通道并行控制和计算量大等特点。这就要求控制器硬件拥有较高的数据处理能力。因为控制系统中具有随动性、非线性、时变和离散的特点,控制算法较为复杂,为了保证复杂数据的处理速度,采用FPGA+DSP的双核处理架构。其中FPGA负责信号的采集和输出,DSP负责数字滤波、算法运算和与上位机的通讯。使用FPGA做信号采集是因为 FPGA的运算速度不受外部设备数量的影响。因为FPGA 的每个外部设备的管理都是独立的,其代码的执行是并行执行的,所以FPGA可以满足高速采集与输出的要求[5]。但是在FPGA中要实现算法比较困难,而且其运算速度不如DSP,这就会在控制过程中产生较大的延迟,影响控制效果。DSP弥补了FPGA在运算方面的缺陷,其通过C/C++的语言编程,可以更加灵活便捷的写入控制算法。本控制系统中采用Xilinx公司生产的Spartan-6系列中的XC6SLX16芯片作为信号采集芯片,DSP芯片使用TMS320C6748。
在信号的采集与输出时,涉及到模拟信号与数字信号之间的互相转换。本系统所用到的ADC (Analog Digital Converter)需要具有高速、分辨率高、双极性输入、多通道间需要信号调理的功能,所以本系统采用ADI公司的 AD7606芯片,其最高采样频率可达到200K、8通道并行采集、16-bit采样精度、支持±5V和±10V的双极限输入的逐次比较型模数转换器,其支持通用并口和SPI串口通信。本系统中的数模转换器需要具有高速、高分辨率、双极性输出和多通道的要求。本文是采用ADI公司的AD5724,其接口为SPI最高通信时钟速度可达30MHz。其精度为12-bit,四通道并行输出,支持单极性和双极性以及电压范围可调的输出。
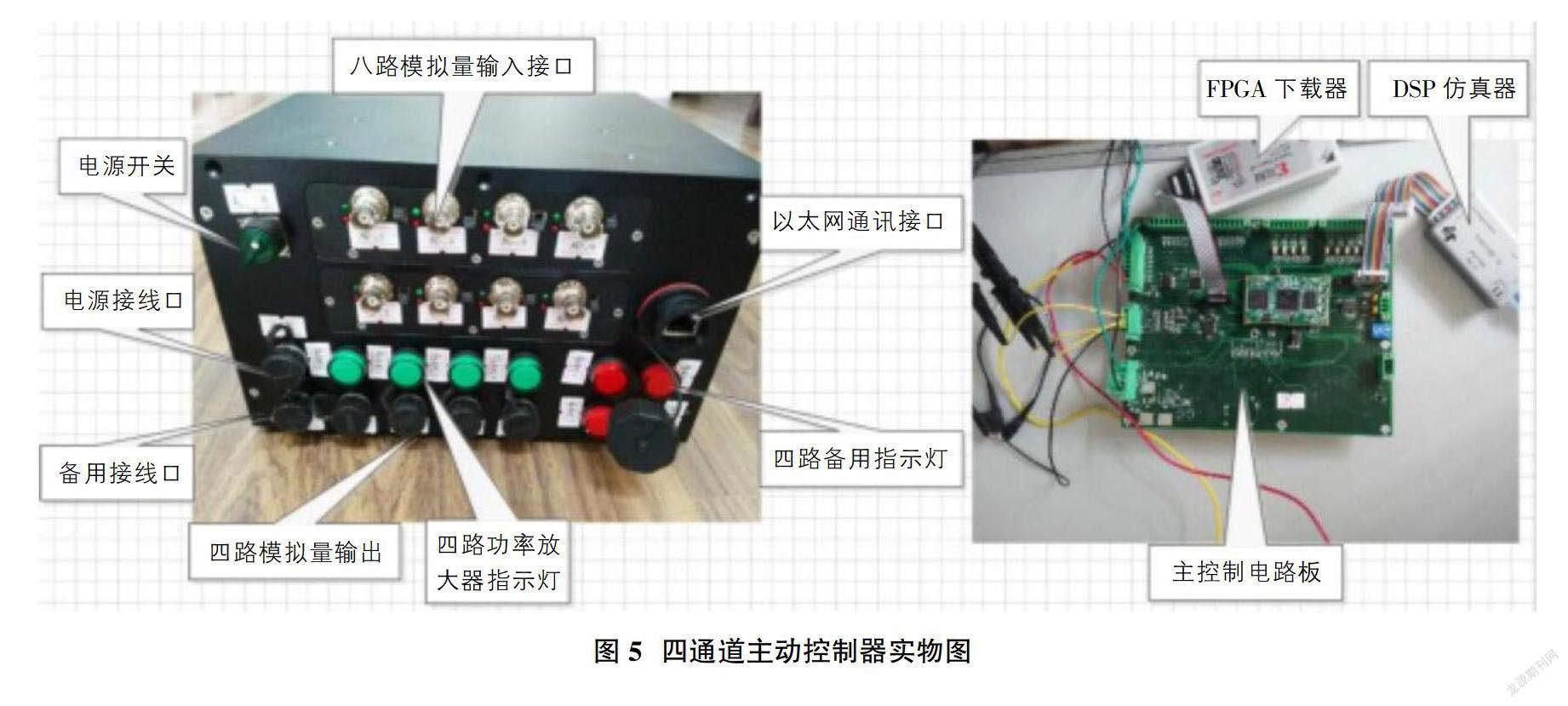
在上位机与下位机的通讯中,因为控制系统的传输数据量大,对通讯接口的稳定性要求高,故采用以太网与上位机进行数据交互。在硬件条件有限的情况下,为了确保DSP能把足够的运算量用在控制算法的计算中,需要尽量减少其他功能所占用的计算量,故DPS与上位机的通讯采用外置芯片。控制器实物图如图5所示。
4 算法仿真
在Simulink中针对由1个参考信号,4个误差信号,4个混合式电磁隔振器组成的主被动复合隔振系统进行了四通道主动控制系统建模。在仿真中,我们需要用到多个次级通道辨识函数。在四通道主动控制中,每个控制器前都有四个次级通道辨识函数。在多通道主动控制的工程化应用中,计算量是一个重要的性能指标。以FxLMS算法为例,设在多通道主动控制系统中有J路参考信号、M路误差信号和K个次级通道,其中控制器和次级通道建模滤波器的长度分别为L和Ls,那么实现该算法所需的乘加次数为(L+Ls)×J×M×K。例如,为了控制一个隔振平台的振动,采用1个参考信号、4个误差传感器和4个次级振源,控制器长度和次级通道辨识长度都为128,系统采样频率为1kHz。则为了完成算法的运算,DSP芯片的乘法累加运算不少于4×106。所以在仿真时,不能为了提高控制效果而盲目的提高辨识滤波器的阶数和控制器的阶数。在控制效果差别不大的情况下,优先考虑较低的阶数。因为过高的阶数会导致硬件的运算过量而产生较大的输出时滞,对控制系统造成极大的影响。本次仿真中采用横向滤波器离线辨识得到的300阶次级通道辨识参数,控制滤波器阶数为128阶,步长为5×10-5。仿真结果见图6-图9,由频谱图可以看出,在进行主动控制后,振动幅度有明显下降。根据计算,四通道均有近13db的振动衰减。
5 实验
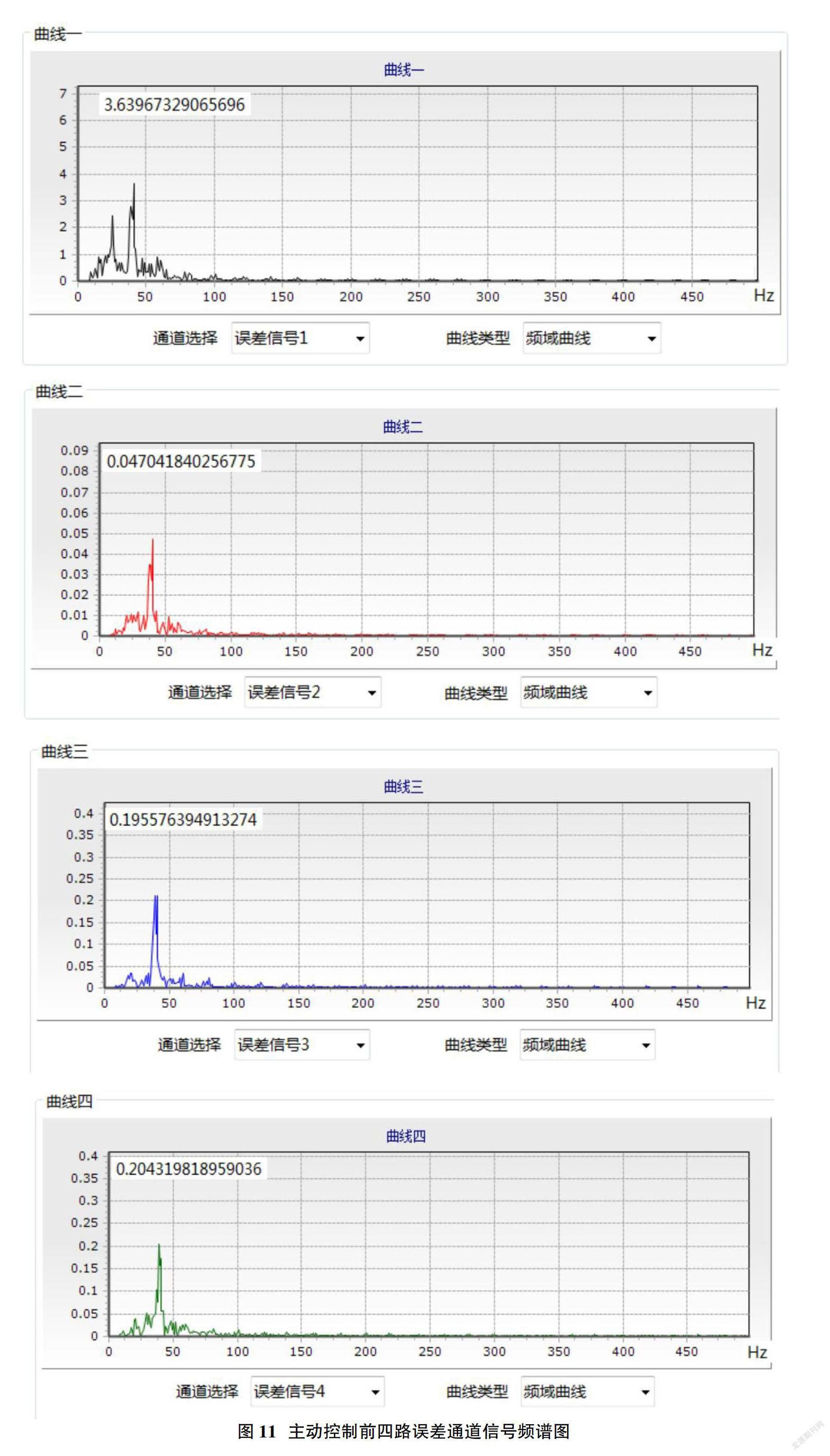
整个控制系统的结构图如图10所示,上位机上由自主研发的控制软件进行数据的显示以及参数的调整。在第一节介绍的双层浮筏隔振平台上进行四通道主动隔振实验,实验针对37Hz的特定频谱进行控制。为了验证上位机显示数据的准确性并且更加直观的看到主动隔振的效果,本次实验中除了上位机自身的数据显示外,另外采用LMS公司的检测仪器进行振动噪声检测。
由图11-图14可以看出,四条控制通道分别取得了7db、13db、13db和8db的减振效果。实验结果与仿真结果有所差距,其原因可归纳为二点:①仿真中所用的参考信号与原始信號完全相同,而在实际实验中,参考信号传感器采集到的参考信号与原始信号并非完全相同,其中掺杂了许多噪声;②四个控制点的作动器工况并非完全一致,1、4号作动器线性度较差,导致控制效果不理想。在实验中虽然所有的误差通道均采用300阶的横向滤波器进行辨识,但是在进行控制时,根据其误差通道的复杂程度不同,我们采用不同的控制步长以及控制器阶数来进行控制。对于次级通道辨识结果较为复杂的通道,适当提高其控制滤波器的阶数或减小其控制步长,可以明显的提高其控制效果。
6 总结
本文基于DSP+FPGA的双核处理硬件,开发了一套搭载MFxLMS算法的多通道主动控制器,成功的解决了双层浮筏隔振中纯被动式隔振器对低频噪声隔振效果差的问题。多通道主动控制不同于单通道主动控制,单通道主动控制的重点在于控制某一点或者一小块区域的振动,在本次多通道主动控制中同时使用四个作动器联动,将控制区域从一个点上升到了一个面,对浮筏台架进行整体振动控制,获得了全局振动平均下降10db的效果。但是仍存在不足,如果使用分散式控制即完全解耦法进行控制,整个控制系统的收敛速度和稳定性都会有所加强,但是这又对硬件的要求大大提高了。
参考文献:
[1]朱石坚,何琳.船舶机械振动控制[M].北京:国防工业出版社,2006.
[2]C R Fuller, S J Elliott,P A nelson.振动主动控制(楼京俊等译).北京:国防工业出版社,2014.
[3]高伟鹏,何其伟,闫政涛.一种应用FXLMS算法的双层隔振试验装置[J].噪声与振动控制,2016,36(4):70-75.
[4]浦玉学.自适应振动噪声主动控制若干关键问题研究[D].南京航空航天大学,2015.
[5]彭宇,姜红兰,杨智明,乔立岩,刘旺.基于DSP和FPGA的通用数字信号处理系统设计[J].国外电子测量技术,2013(01):17-21.
