基于高频电压信号注入与改进卡尔曼滤波的永磁同步电动机控制系统设计
2020-09-10徐大利
徐大利


摘要:以永磁同步电动机(PMSM)为研究对象,基于脉振高频电压信号注入技术和改进卡尔曼滤波技术,本文提出了一种新的PMSM无传感器控制系统。具体方法是,注入将脉振高频电压信号注入同步旋转坐标系的d轴,从高频载波电流中通过空间凸极跟踪技术提取转子位置估计误差信号,转速和位置估计信息通过改进卡尔曼滤波器处理得到。仿真实验结果表明,这种方法可以实现PMSM的调速控制。
关键词:PMSM;高频电压信号;改进卡尔曼滤波
0 引言
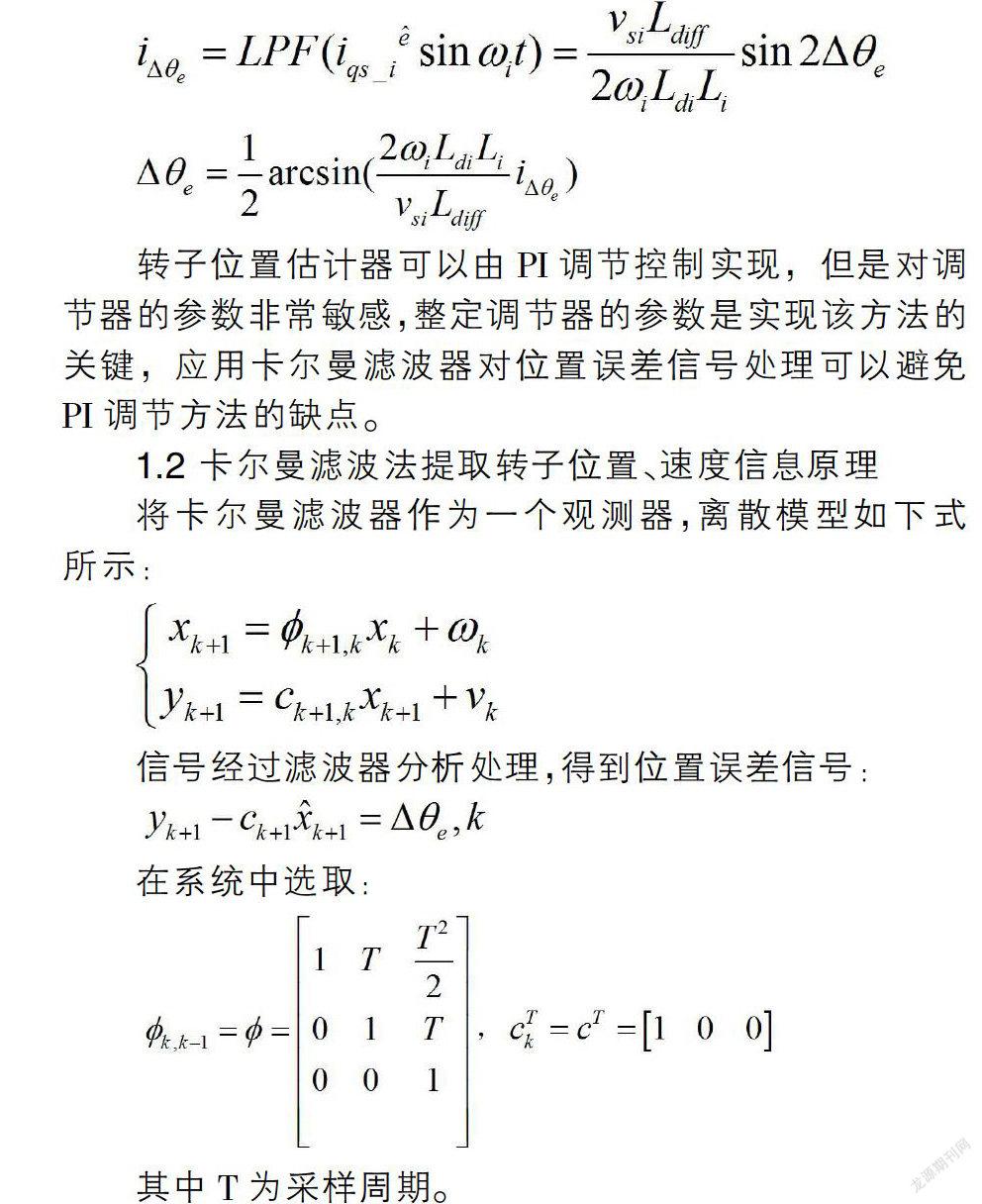
PMSM无传感器控制技术逐渐称为研究热点。高频电压注入法[1-2]利用电机凸极性对高频电流波形的影响来分析得出转子的位置信号,从而估算出转子的位置。转子位置估计器通常由PI调节控制实现,对调节器的参数非常敏感,整定调节器的参数是实现该方法应用的关键[3]。应用卡尔曼滤波器对位置误差信号处理可以避免PI调节方法的缺点且可以获得良好的静、动态性能。
1 基于脉振高频电压信号注入与卡尔曼滤波的PMSM无传感器控制系统
1.1 脉振高频电压信号注入法原理
在估计的同步旋转坐标系的轴上注入高频正弦电压信号。
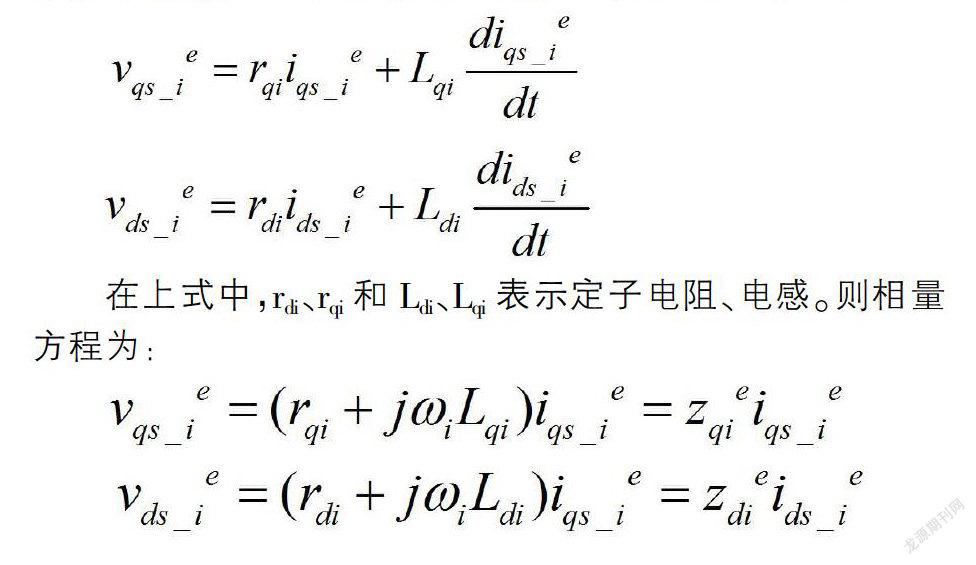
当注入的电压信号频率远远大于电动机的转动角频率,PMSM就是一个的R-L电路模型,则电压方程为:
2 系统实验结果及分析
基于对原理的分析,Matlab建立仿真模型如图1所示。电机仿真实验控制方案采用id=0的速度、电流双闭环矢量控制。
电机参数为:定子电阻RS=0.618?赘,直轴电感Ld=0.007418H,交轴电感Lq=0.012285H,转子磁链?鬃f=0.1128Wb,转动惯量J=5.59×10-4kg·m2,极对数Pn=2。仿真实验如下所示:
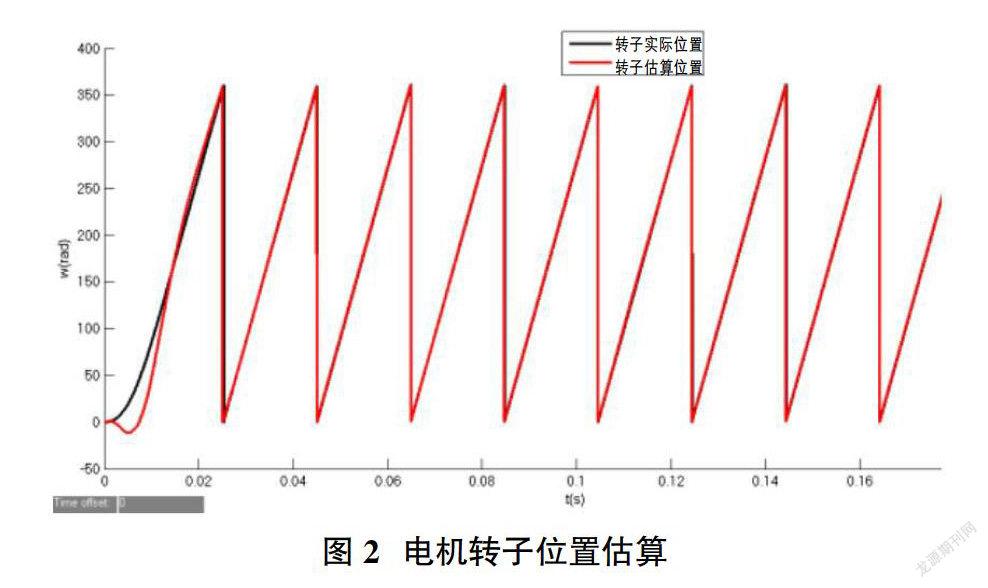
实验给定初始速度为n=200r/min,0.05s速度升至400r/min。(图2)
电动机启动阶段,转子位置估算误差较大,但是经过一个周期后,转子估算位置几乎与转子实际位置一致,可见,这种算法可以较好的估算转子位置,电动机起始估算速度和速度突变时的估算速度有误差,单随着系统自动调节,估算速度曲线几乎与真实速度曲线重合,说明速度这种算法可以很好的实现速度估算。
实验结果表明,电机启动阶段,转子位置和速度估计有较大偏差,但最终系统可以达到稳定运行。
3 结语
基于脉振高频电压信号注入技术和改进卡尔曼滤波技术,本文提出了一种新的PMSM无传感器控制系统。经过理论分析和仿真实验验证,该方法不依赖电机参数,可实现对电机转子位置和速度的估计,具有良好的性能。
参考文献:
[1]Jang Ji-Hoon, Sul Seung-Ki. Sensorless Drive of SMPM Motor by High Frequency Signal Injection [J]. IEEE Trans. on Ind. Appl, 2012 39(4): 1031-1038.
[2]Ha Ji, Sul SK, Park M H. Position Controlled Interior Permanent Magnet Motor Without any Rotational Transducer [C] Proc of IEEE 2K, 2013: 396-399.
[3]Wang Limei, Guo Qingding, Lorenz R D. Sensorless Control of Permanent Magnet Synchronous Motor[C] Proceedings of Power Electronics and Motion Control Conference. 2013: 186-190.
[4]李長明,王传奎,魏利胜.基于卡尔曼滤波的永磁同步电机转子位置估算方法研究[J].绥化学院学报,2019.