高速列车座椅主动悬架的多模态控制研究
2020-09-10田璐璐郑玉强郭文武
田璐璐 郑玉强 郭文武



摘要:建立了基于主动悬架的高速列车悬架-座椅-人体的四自由度动力学模型,并对该列车模型稳定性的优化控制进行了研究。针对该座椅主动悬架模型设计了模糊控制器和复合P-模糊-PID的多模态控制器,应用Matlab/Simulink软件在相同的工况下进行仿真实验,并将两种控制方法下的仿真结果与被动悬架车辆模型的仿真结果进行对比分析。结果表明,相较于被动悬架车辆模型,上述两种控制方法下的主动模型座椅处的振动特性均得到了改善,达到了预期的控制效果,且多模态控制下的改善程度最佳;对高速列车乘坐舒适性的提高有着一定的理论参考意义。
Abstract: A four-degree-of-freedom dynamic model of high-speed train suspension-seat-human body suspension is established based on active suspension, and the optimal control of the train model’s stability is studied. For this model, fuzzy controller and compound P-fuzzy-PID multi-modal controller are designed, under the same working condition, the simulation experiment is carried out by using the software of MATLAB/Simulink, the simulation results of the two control methods are compared with those of the passive suspension vehicle model. The results show that the vibration characteristics of the active model seat under the above two control methods are improved, and the expected control effect has been achieved which compare with passive suspension vehicle model, and the effect of the multi-modal control is better. It also has certain theoretical reference significance for improving the ride comfort of high-speed train.
关键词:主动悬架;模糊控制;多模态控制;仿真
Key words: the active suspension;fuzzy control;multi-modal control;simulation
0 引言
被动悬架由于为自身的刚度阻尼参数值固定不变的线性系统,随着时代的发展,越来越难以满足车上人员对乘坐舒适度的要求。刘永强等[1]提出了一种基于加速度阻尼原理的动控制方法,发现其在提高车辆运行平稳性和抗时滞方面效果更佳;李西成等[2]在建立两种悬架的动力学模型和天棚控制系统的基础上,利用Adams与Matlab/Simulink联合仿真,天棚控制下的悬架系统在振幅上有了一定的改善,并增加了整个悬架系统的稳定性;郑竹安等[3]研究了天棚阻尼并附加变刚度的半主动悬架座椅,较天棚控制进一步降低了座椅的垂向加速度;但半主动控制的路面不确定因素适应度偏低,反应速率存在一定的迟滞时间,而主动悬架在行驶平顺性和操纵稳定性上可以较好的满足上述不足[4]。
本文在两者控制理论基础上进行座椅主动悬架控制器的设计,利用牛顿第二定律建立动力学微分方程,设计了基于速度变化的复合P-模糊-PID的多模态控制器[5]。
1 主动座椅悬架系统动力学模型建立
1.1 主動座椅悬架模型
车体选用1/4列车悬架模型,在宋光伟等[6]高速列车座椅半主动悬架模型的基础上进行改进,建立悬架—座椅—人体的四自由度串联主动控制模型,设计使用多模态控制器输入悬架车身与转向架系统之间所需要的理论控制力。模型如图1所示。
由牛顿第二定律的座椅主动悬架系统运动微分方程为:
式中:ml为1/4转向架质量、mz为1/4车体质量,mr为座椅质量,mg为椅上人员质量,kq为转向架垂向刚度,kz、cz分别为车体垂向刚度和阻尼,kr、cr分别为座椅垂向刚度和阻尼,kg、cg分别为人体垂向刚度和阻尼,q为高速轨道的路面不平度激励,xl、xz、xr、xg分别为垂向的转向架位移、车体位移、座椅位移和人体位移。
1.2 轨道路面不平顺激励模型
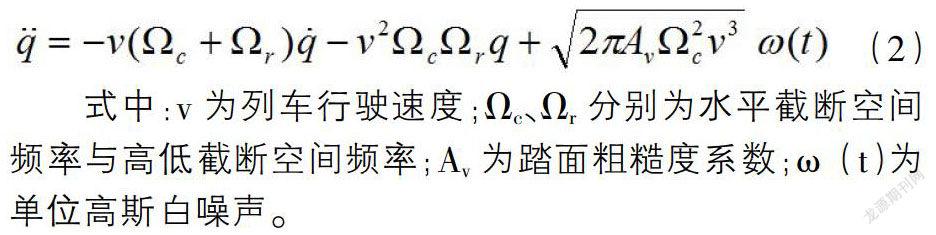
轨道接触面的几何位置在实际运行过程中,由于受众多不确定因素的干扰而表现出随机性。且目前国内尚未形成表征轮对与踏面接触的统一轨道谱标准,所以本文采用与我国铁路线路较为接近的德国轨道不平顺功率谱时域表达式[6]:
式中:v为列车行驶速度;Ωc、Ωr分别为水平截断空间频率与高低截断空间频率;Av为踏面粗糙度系数;?棕(t)为单位高斯白噪声。
2 多模态控制器的设计
多模态控制源于对PID控制和模糊控制两种策略的复合,是提高模糊控制器动、静态性能的一种方法[7]。多模态包括比例P控制模态、模糊控制模态和PID控制模态。
2.1 具有修正因子的模糊控制器优化
常规模糊控制器在将输入变量模糊化历程中,模糊控制器的参数量化因子和比例因子在变换变量过程中是某一确定常数。但当被控对象运行状况急剧恶化而致使目标动态特征大幅度动荡时,模糊控制的效果有可能会变的失调。因此,为了改善列车悬架设计模型的模糊控制能力,有必要将量化因子和比例因子常数设计成可随运行状态变化而伴随其调整的变量。
具体实现方法是在Simulink中利用建立function模块,以便于在Matlab中写入代码。具有修正因子的模糊控制子程序如图2所示。
2.2 多模态控制器的搭建
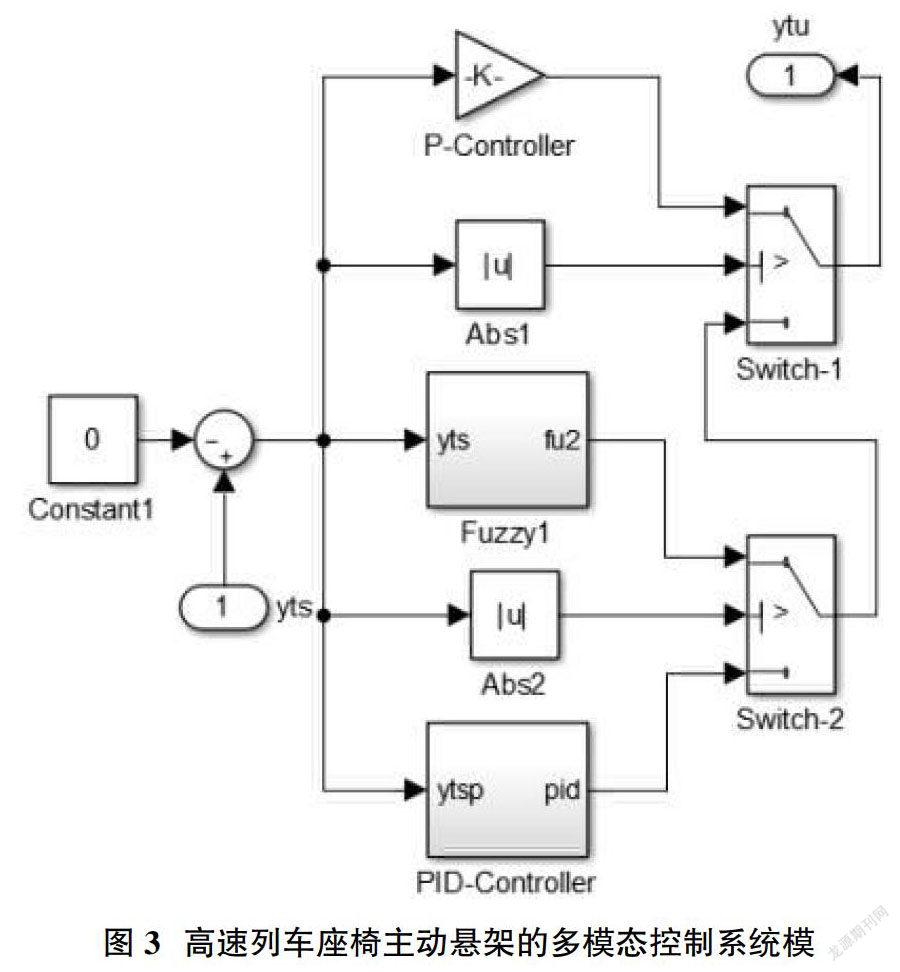
传统的PID控制策略的三个增益比例P、积分I和微分D参数的最终确定是该控制方法的关键,其整定一般采用试凑法。多模态P-模糊-PID控制器工作原理:在系统输入变量有较大的偏差时采用比例P控制,在集中偏差区域采用模糊控制,在较小的偏差区域时采用PID控制,即便于消除静态偏差。多模态控制器的三种控制方式在系统运行时需要根据输入信息的绝对值和设置的选择阈值进行分段切换控制,即多模态的分段控制的关键是预设一合理阈值。为了避免各模态间相互影响,在控制器搭建和调试过程中需要反复调整。设计的P-模糊-PID多模态控制的高速列车座椅主动悬架在Matlab/Simulink中搭建的仿真框图如图3所示。
3 座椅主动悬架仿真
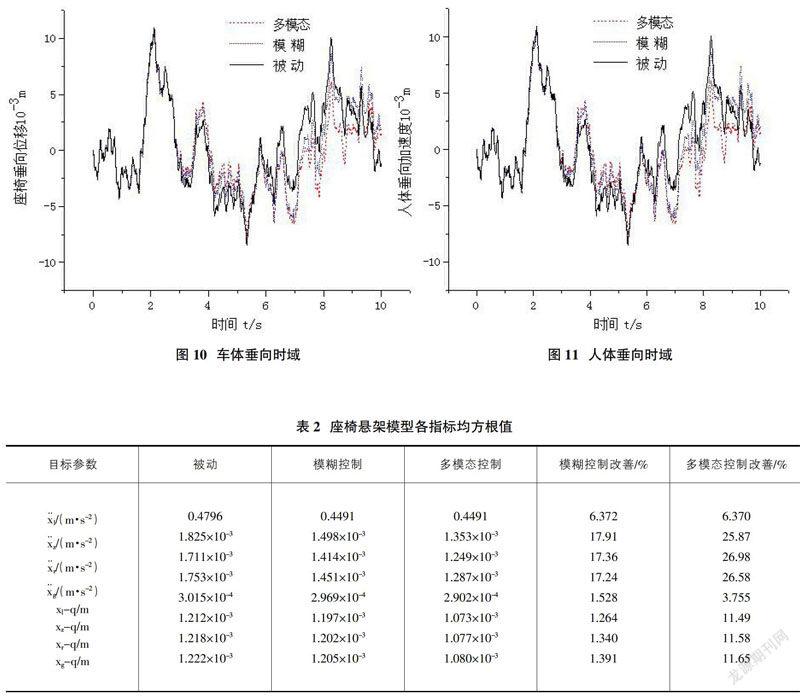
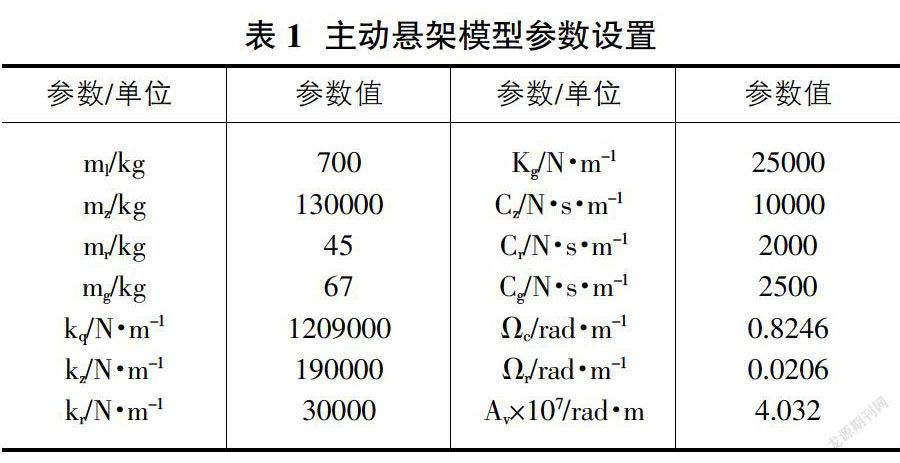
系统在模拟行驶速度200km/h,高斯白噪声采样频率0.01Hz下,通过Matlab/Simulink对建立的高速列车1/4车座椅主动悬架的模糊控制和多模态控制进行建模仿真分析[8]。选用的悬架与激励功率谱参数如表1所示,图4-图7分别为转向架、车身、座椅和人体的垂向加速度时域图,图8-图11分别为转向架、车身、座椅和人体的垂向位移时域图,表2为座椅悬架模型各指标均方根值表。
4 结论
本文通过Matlab/Simulink对上述两种座椅主动悬架控制方式的仿真数据以及对其数据的均方根值表结果得出如下结论:
①模糊控制与多模态控制均有效改善座椅主动悬架的乘车舒适性和运行平稳性;
②在常规模糊控制基础上设计出具有自动修正量化因子和比例因子功能的复合P-模糊-PID控制,结果表明后者对悬架控制的调节范围更广,其座椅垂向加速度和位移值较前者均提高了10%以上,改善效果明显。
③两种控制策略在车身、座椅与人体加速度和动挠度值明显改善的情况下,其转向架的垂向加速度和动挠度值分别降低了6.372%和6.370%,具有稍好的轨道路面友好性。
参考文献:
[1]刘永强,杨绍普,廖英英.高速动车组悬挂系统横向半主动控制仿真分析[J].振动与冲击,2010,29(09):51-54,96,241.
[2]李成西,谈乐斌,潘孝斌,等.某防爆车半主动座椅悬架的天棚控制动力学研究[J].兵工自动化,2014,33(11):25-29.
[3]鄭竹安,熊新,提艳,等.基于MATLAB的半主动悬架可变刚度座椅的研究[J].汽车零部件,2017(08):9-12.
[4]寇发荣.汽车磁流变半主动座椅悬架动态特性的试验研究[J].汽车工程,2015,37(11):1346-1352.
[5]Boileau P E. Whole-body Vertical Biodynamic Response Characteristic of the Seated ehicle Driver Measurement and Model Development[J]. Journal of Industrial and Engonomic, 1998, 22 : 449-472.
[6]宋光伟,殷盛福,王凯平,等.高速列车座椅半主动悬架系统研究[J].现代制造工程,2014(08):16-18,89.
[7]何二宝,杜群贵,冯元元.电控空气悬架车身高度调节的模糊PID控制[J].机床与液压,2012,40(05):86-88.
[8]曾光齐,胡均安.模糊控制理论与工程应用[M].武汉:华中科技大学出版社,2000:86-98.
