汽车纵向动力学研究综述
2020-09-10于旺
于旺
摘要:随着汽车工业的发展,汽车纵向动力学研究不断加深,汽车在道路上行驶,就会存在驱动、制动、滑移等纵向动力学方面的问题。针对这一问题的研究,人们提出了汽车纵向动力学的概念。汽车纵向动力学的研究主要包括:汽车制动动力学、汽车防抱死系统、汽车驱动防滑系统、汽车自适应巡航系统、汽车自动刹车系统。本文将主要介绍汽车纵向动力学控制系统组成和原理、汽车制动动力学控制系统的研究进展、汽车防抱死系统的研究进展、汽车驱动防滑系统的研究进展、汽车自适应巡航控制系统的研究进展、汽车自动刹车辅助系统的研究进展。
Abstract: With the development of the automotive industry, the research on the longitudinal dynamics of automobiles has continued to deepen, and there are problems with longitudinal dynamics such as driving, braking, and slipping when the car is driving on the road. In view of this problem, people have proposed the concept of automobile longitudinal dynamics. The research of automobile longitudinal dynamics mainly includes: automobile braking dynamics, automobile anti-lock braking system, automobile driving anti-skid system, automobile adaptive cruise system, automobile automatic braking system. This article will mainly introduce the composition and principle of automotive longitudinal dynamics control system, the research progress of automotive brake dynamics control system, the research progress of automotive anti-lock system, the research progress of automotive drive anti-skid system, the research of automotive adaptive cruise control system Progress, research progress of auto brake assist systems.
关键词:汽车;纵向动力学;防抱死;驱动防滑;制动动力学;自适应巡航;自动刹车;系统
Key words: automobile;longitudinal dynamics;anti-lock braking;driving anti-skid;braking dynamics;adaptive cruise;automatic braking;system
中圖分类号:U469.72 文献标识码:A 文章编号:1674-957X(2020)24-0023-02
0 引言
目前城市的发展和道路的优化设计极大地考验了汽车在道路上的行驶性能,要想在现有的道路上道路上提高交通流量并控制交通事故的发生,这就要求汽车设计者能在提高汽车安全行驶的车速和减小汽车与前后车之间的距离(但能有足够的安全距离)的同时能够保证汽车的各方面的稳定性能。在目前看来车辆驾驶员操纵能力的局限性很大程度上决定了其操作是否能满足车辆在行驶时的安全性。因此,以往简单地提高部分器械的机械性能发展辅助或者是部分取代人类的操纵稳定性方法已经不再适用,这就为提出车辆纵向动力学控制系统奠定了必要的基础。
1 汽车纵向动力学系统
车辆纵向控制系统作为车辆主动安全以及操纵稳定的系统,主要由关键的两部分组成[1],即上层和下层系统。它所需要的控制模型大致可以分为:整车制动模型、发动机模型、整车传动模型和车辆稳定运行模型等。
1.1 汽车纵向动力学控制系统组成
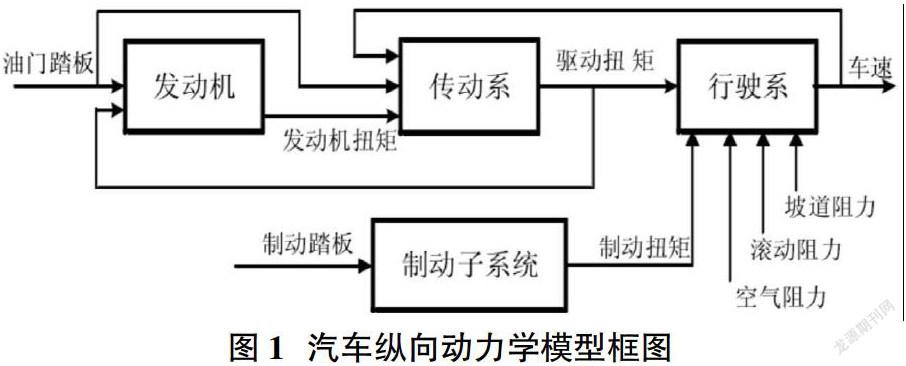
车辆纵向动力学控制系统包括发动机、传动系、制动子系统、整车行驶系等不稳定系统的关键部件,它的模型如图1所示。
1.2 汽车纵向动力学系统的工作原理
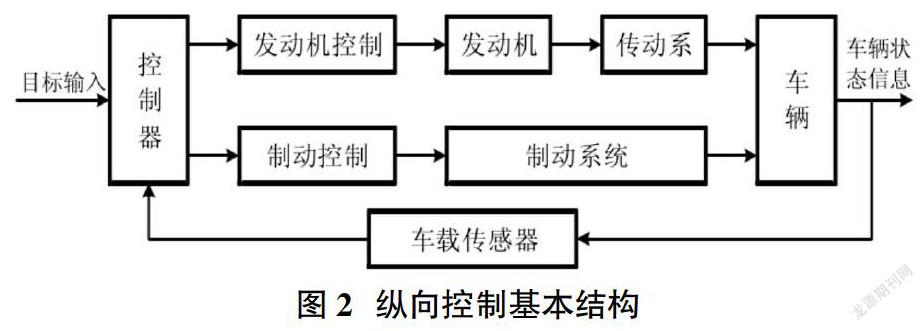
如图2所示,驾驶员踩下加速踏板,由发动机进行动力输出(空气燃烧的比例、EGR、气缸的总进气量、点火提前角、发动机转速、驱动载荷、节气门开度对其有关键影响),其中点火提前角、EGR和空燃比是由发动机自我调节控制输出的数值,而节气门位置、发动机转速和驱动载荷是控制器的输入值。①传动系主要是将发动机输出的力矩传递给车辆的行驶系。②行驶系子系统是接收车辆的传动或制动扭矩,由此来判断是否改变车速、加/减速度。此系统中的制动子系统的主要使命是接收执行器的制动命令并输出制动扭矩。在实际的工况中,学者们通常建立车辆的纵向动力学系统非线性数学模型来获得车辆的一些重要特性和关键数据,从而对整合车辆系统进行分析和研究[2]。
2 汽车纵向动力学研究进展
美国的Shinya Kikuchi研究员和印度Partha Chakroborty研究员联合研究了基于模糊推理逻辑车辆自动跟踪控制模型,随后对它进行了行车试验[3]。美国D.B.Maciuca、J.K.Hedrick和J.C.Gerdes共同开发了适用于车辆自我行驶的自动制动系统。德国机械研究员Marcus Borner和Harald Straky等人为加强车辆的操稳性、道路行驶安全性,建立了悬架及制动系统模型。戴姆勒—奔驰公司的研究员K.J.Hunt和H.Fritz等人针对纵向动力学控制系统的非线性特性,建立了汽车纵向动力学参数的局部模型网络(LMN)。国内对这方面的研究也紧随世界车辆行业的潮流,比较突出的是中国重型汽车集团公司。
在当今的汽车纵向动力学研究中,汽车制动动力学、汽车防抱死系统、汽车驱动防滑系统、汽车自适应巡航系统、汽车自动刹车系统依旧是研究重点。同时也是提高车辆在道路上行驶安全性的关键。
2.1 汽车防抱死系统研究综述
1936年,BOSCH公司提出了相对简单的控制算法。19世纪50年代,ABS系统第一次被用在了汽车上。1970年美国福特公司和莱斯勒公司分别研制了有真空助力的 ABS制动装置和采用四轮适用型的ABS装置。1980年,微处理器的使用让智能的ABS制动装置有了突破性的发展。1990以后,ABS技术逐步发展成熟,其性能也有了极大的完善。在国内,1980年以后,我国一方面采用“引进—学习—创新”的战略思路。另一方面,我国发布了鼓励创新的政策支持,这一政策的提出使ABS的创新也取得显著成果。ABS的制动性能是当今研究的重点方向。
2.2 汽车驱动防滑系统的研究进展
它可以通过ABS系统实现对车辆的控制,与ABS不同的是它能有效防止车辆在起步加速阶段驱动轮发生空转的现象,保证起步阶段车辆滑转率保持在需要水平。
1972年,日本的车辆研究员通过实验研究发现车辆的滑转可以通过控制发动机气缸点火频次来实现。1978年,德国人员研究出通过减少给发动机喷油来控制发动机的输出转矩,来实现对车辆滑转控制的目的。1981年,日本研究员发现通过调节离合器接合程度也能限制驱动轮的过度滑转。1985年,Volvo公司率先研制出了电子牵引力控制系统。1986年Benz公司和Wabco公司共同研发牵引力控制系统。1990年后,ASR技术迎来了发展的高峰期。1995年日本研发了通过调节发动机节气门开度进而调节发动机的输出转速来实现控制空转的装置。21世纪后,主动安全性能将成为消费者的主要需求,这也在一定程度上推动了ASR的技术研究和发展。
国内,北京理工大学等都将ASR的研究列入重点研发课题,并在ASR的控制方法发面取得了很多突破。
2.3 汽车制动动力学控制系统的研究进展(基于EMB)
1869年,早期的EMB系统最先采用的是电磁盘式制动方式。1890年以后,出现了以鼓式制动和盘式制动为主导的EMB系统。1912年,随着世界对制动器热衰退型、制动性能需要的提高。1930年,研发出内置鼓式制动器取代了电子机械带式制动器。直至1970年,视界研发的电子机械鼓式制动系统逐渐映入人们的眼帘。1995年Delphi公司研制了世界首个鼓式制动EMB执行器,同样首次将EMB制动系统进行实车试验并投入生产。2002年,由德国西门子研制出的典型的楔式自增力EMB制动执行器。
国内的顶尖高校是研究此领域的主要基地,主要是清华大学、吉林大学、同济大学等。
2.4 自适应巡航控制系统研究进展
1950年学者开启了ACC系统的研究,1960年,密歇根大学提出了“智能高速公路”的想法。1964-1971年,美国俄亥俄州立大学在对ACC的研究中指出ACC系统还要考虑到保持车队的稳定性。1970年,欧洲开始研究自适应巡航控制系统技术,并对ACC系统进行了仿真与评估。1996-1997年,美国机构和高校进行了真车实验。1980年日本开始了致力于智能交通系统的研究。直到1995年,日本研制出了第一代ACC系统。21世纪初,各国各个政府开始大力鼓励在汽车上装有ACC系统,以保证汽车的跟随稳定性。利用ACC系统与车道保持相融合,以及与避撞相结合等。相比我国,主要针对控制算法的研究。
2.5 汽车主动避撞系统的研究进展
1938年,Gibson第一次对行驶安全进行讨论,并将局部碰撞、汽车安全等一些新的词语用于行驶理论中。1962年,以德国、日本、美国为代表的发达国家开展了对该方向的研究。1980年,雷达、微机等技术的发展,很大程度上推动了主动避撞系统的技术突破。1986年,德国奔驰公司和10家欧洲公司通过研究先进电子计算技术来提高道路安全和交通效率。1999年,梅赛德斯—奔驰推出Distrnic主动避撞系统并将其用在220型系列S级轿车上。1991年,日本交通运输部倡导第1個先进安全汽车计划开始实施,并在2000年获得产业化产品生产。日本一汽丰田自主研发设计了主动预防安全系统。
到21世纪,主动避撞系统的研究方向逐渐分化为关注驾驶舒适性的自适应巡航系统和关注行驶安全性的自动紧急制动系统。
3 发展方向
汽车纵向动力学作为汽车研究领域不可或缺的一部分,其研究和发展贯穿着整个汽车安全领域的发展。我相信ABS、ASR的系统控制会更加完善。主要包括:ABS和ASR一体化、动态稳定控制系统VDC、ABS与自动巡航系统(ACC)集成、减小体积,降低重量的办法等。ACC控制算法的研究更加全面更加符合当代道路的特点,同样EMB控制系统的发展会更加迅速、更加智能和完善。
参考文献:
[1]Rajamani.R., Shladover.S.E. An experimental comparative study of autonomous and cooperative vehicle-follower conttol systems.Transportation Research Part C: Emerging Technologies. 2010.9(1):15-31.
[2]秦贵和,葛安林,雷雨龙.智能交通系统及其车辆自动控制技术[J].汽车工程,2001,23(2):92-96.
[3]partha. Chakroborty,Shinya Kikuchi.Evaluation of the General Motors based car-following modeis and a proposed fuzzy inference model.Transportation Research part C.2015(7):206-23.