基于SLAM的柏油马路智能清扫机器人
2020-09-10王勇祺吕茵董宇宋晓霖李岩松
王勇祺 吕茵 董宇 宋晓霖 李岩松

摘要:路面养护机械化程度的高低,是一个城市现代程度和综合实力强弱的重要标志之一。针对国内的环卫清洁现状, 本团队研究出一种柏油马路智能清扫机器人,主要解决道路的清洁问题以及如何能摆脱人力的局限性,通过ROS机器人操作系统视觉SLAM和雷达SLAM技术完成机器人对道路模拟地图的构建,从而自动完成对清扫机器人的路径规划问题,使机器人可以自主的规划路径对道路进行全方位清理。
关键词:路面养护;城市环保;智能型清扫;自主规划路径
1 研究背景
城镇化率提升带来道路清扫保洁面积高速增长。随着我国近年来经济快速发展以及国家对基础设施建设的大力投入,我国城镇化率稳步提升,同时人民对于保洁卫生的需求也不断增大。全国城市道路清扫面积数据预测,城市道路清扫保洁面积从2006年的32.48亿平方米增长到2018年的111.18亿平方米,复合增长率约为9.42%。预计随着城镇化率的提升,未来五年城市清扫保洁面积增速继续保持在5%左右,道路清扫刻不容缓。
2 设计原理
2.1 设计思路
本产品主要目的是设计一款针对道路清扫的机器人,对道路进行高效清扫,达到维护路面整洁的功能。该机器人可以自主清扫路面,不需要人工的干预,通过获取道路、车辆位置和障碍物信息,可以应对多种突发情况并进行有效避障。通过使用STM32单片机作为中心控制系统,利用串口通信进行数据间的传递。利用ROS机器人操作系统雷达SLAM和视觉SLAM感知完成对道路虚拟三维地图的构建,并将构建的虚拟地图显示在系统终端,然后经过数据处理将图像显示在PC上位机中,该机器人可以进行智能型清扫,自主规划路线进行清扫,当清扫完成后自主回到停放区域。
2.2 研究方法
2.2.1 STM32控制系统
本产品的设计一款针对城市柏油马路的智能清扫机器人。利用STM32单片机作为控制中心,结合清扫系统,运动系统,三维场景模拟系统对城市路面情况复杂的柏油马路,进行高效清扫,高效节能,维护城市道路的整洁。同时利用车载传感器来感知车辆周围环境通过感知所获得的道路、车辆位置和障碍物信息,控制车辆的转向和速度,从而使安全、可靠地道路上行驶。
2.2.2 电路设计
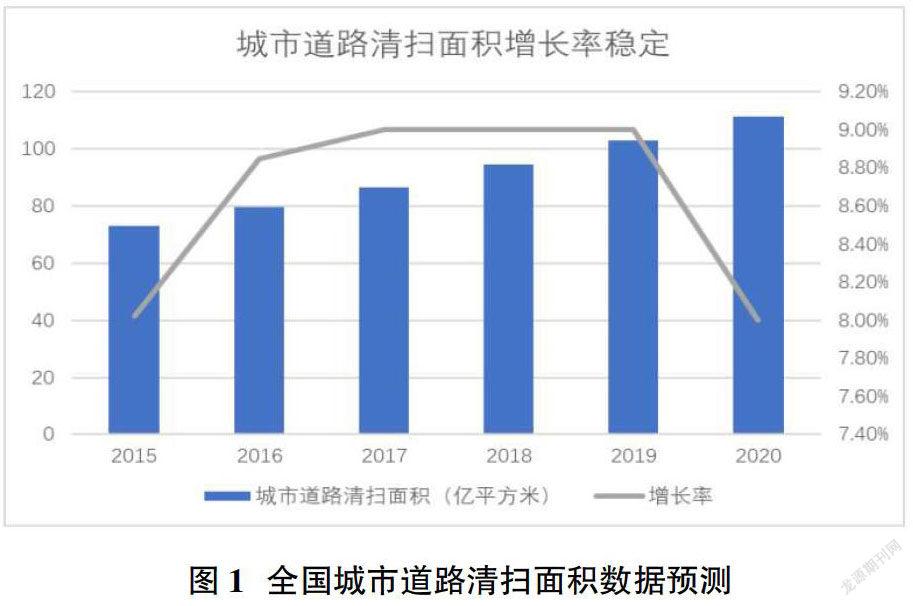
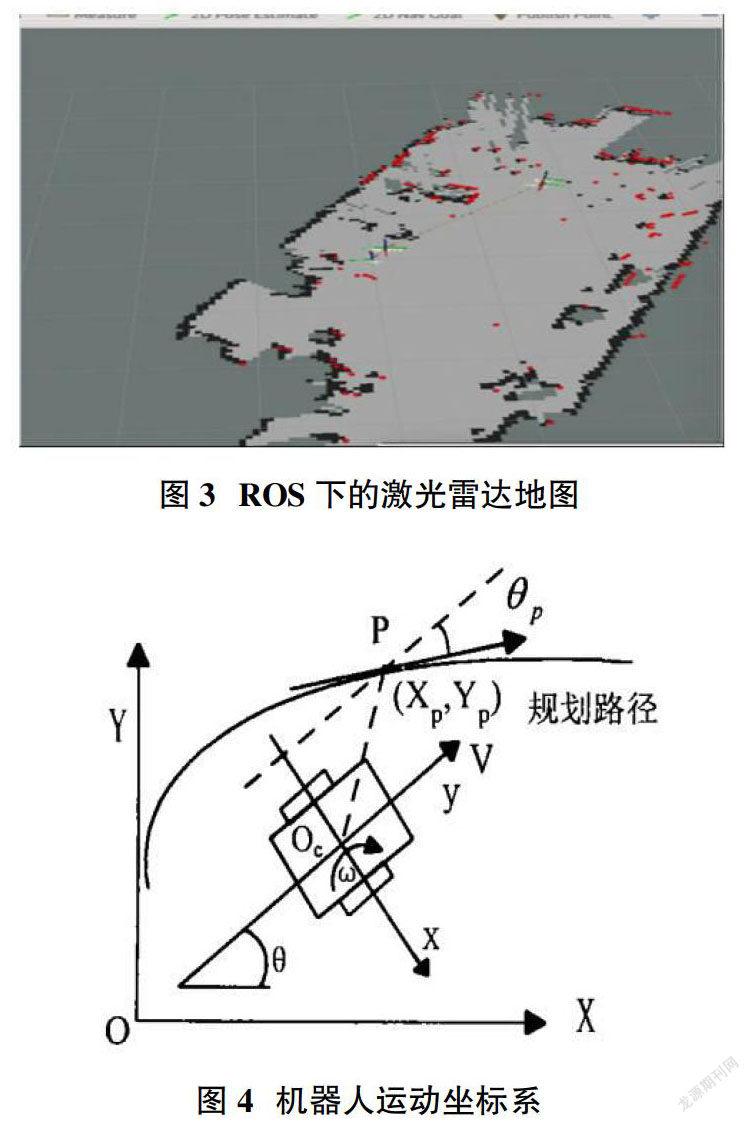
Ros机器人操作系统(图3、图4)。
通过ROS机器人操作系统视觉SLAM和雷达SLAM技术完成机器人对道路地模拟地图的构建,从而自动完成清扫机器人的路径规划问题,通过算法分析进行路径规范,精准避障,自主导航等功能,使机器人可以自动地规划路径,实现路径导航,顺利变道、精准转弯,从而对道路进行全方位清理。
2.2.3 整体结构概述
整体结构设计(图5、图6)。
该产品结构主要由多过滤式螺旋离心吸尘系统、一体式单电机多传动系统、单自由度链条清扫器、多级式泵水系统、万向蜗轮蜗杆传动机构、后部螺旋垃圾收集器、多通道高压喷雾系统、行进轮传动结构、底部单滚刷活动式吸尘器等构成。该产品创新结构主要针对与道路这类特殊材质地形的清扫,极大地提高了清扫效率及清扫效果。
3 创新特色
①智能取代人工,省时省力。利用ROS机器人操作系统的路径规划和模拟地图构建技术,取代传统费时费力的人工清扫,实现了智能型机器人的功能,也极大地方便了人们的生活以及工作效率。
②功能创新,运动清扫一体化,自主导航。利用机器视觉的图像处理及三维场地恢复技术结合雷达SLAM技术,实现了机器人对整个的道路场景的分析,规划出最优的路线对道路进行清扫。
4 應用前景(结语)
随着城市道路的不断扩展,城市化规模不断扩大,人流车流的增大,道路垃圾越来越多、出现的频率越来越快。道路运营过程中,道路垃圾不仅影响道路的路容路貌,不利于环保,且增加了养护职工的工作难度,更给道路安全通行埋下了重大隐患。本团队研究出的道路清扫机器人作业方便,清扫效率高,除尘效果好并且作为环卫设备之一,可广泛利用于干线公路,市政以及机场道面等道路清扫,未来前景良好。
参考文献:
[1]胡正伟.清扫机器人定位及路径规划研究[D].燕山大学,2010.
[2]凌双明.基于atmega128清扫机器人的控制系统设计与研究[D].湖南大学,2014.
[3]陈永芳,陈辉堂,蒋平.移动机器入全局最优规划的研究[D].同济大学学报,1999(27):15-18.