基于竞赛的智能机器人小车设计
2020-09-10高文英
高文英

摘要:为了提升大学生动手能力,根据机器人竞赛要求,设计出一个能够寻迹、避障、捡球、分球入库的机器人小车。采用4轮进行避障行进及收球,采用3自由度直角坐标型手臂铲板和机械爪配合结构,机械爪合拢后机械臂抬起使铲板内的球由机长筒滚入收球框内,收球框分为上下两层,通过直径不同的原理进行分拣;通过电机选择、舵机选择及传感器选择,实现电动控制要求;最后Arduino单片机为控制核心进行编程,满足运行要求。
Abstract: In order to improve operational ability of college students, according to the requirements of the robot competition, a robot car that can track, avoid obstacles, pick up the ball, and divide the ball into the warehouse is designed. Four wheels are used to avoid obstacles and collect the ball, and the 3-degree-of-freedom rectangular arm scooping plate and mechanical claw matching structure are adopted. After the mechanical claw is closed, the mechanical arm is lifted to make the ball inside the scooping plate roll into the ball box from the machine barrel, the ball receiving frame is divided into two layers, which are sorted by the principle of different diameters; through motor selection, servo selection and sensor selection, electric control requirements are realized; finally, the Arduino microcontroller is programmed for the control core to meet the operation requirements.
关键词:机器人;分拣;控制;
Key words: robot;sorting;control
0 引言
为了达到国家高技能人才培养要求,适应中国制造2025发展,提高大学生动手实践能力,在课程设置中增加实践动手环节是当前教育课程改革不可或缺的重要环节[1]。
1 机械部分设计
1.1 总体设计
采用4轮进行避障行进及收球,直流电机驱动两个后轮提供车的动力来源,前轮为两个万向轮来转向,收球方式采用3自由度直角坐标型手臂铲板和机械抓配合结构,在车前进的过程中铲板将紧贴地面将所经过处的球收起,收到球后机械抓合拢防止收到的球滚出去,机械爪合拢后机械臂抬起使铲板内的球由机长筒滚入收球框内。收球框分为上下两层,上层放网球,下层放高尔夫球,中间用三个杆支撑任意两杆间的距离是比网球直径小比高尔夫球直径大,保证了球掉入收球框内后网球留在上层高尔夫球漏到下层实现分球效果。球筐内上下层均有一定斜度保证球滚动,在框的右侧有一由舵机控制的挡板,当舵机顺时针转动时挡板向下转动放出上层网球并保证挡住下层高尔夫球不被放出,当舵机逆时针转时挡板向上转动放出下层高尔夫球,总体设计如图1所示[2]。
1.2 行走装置
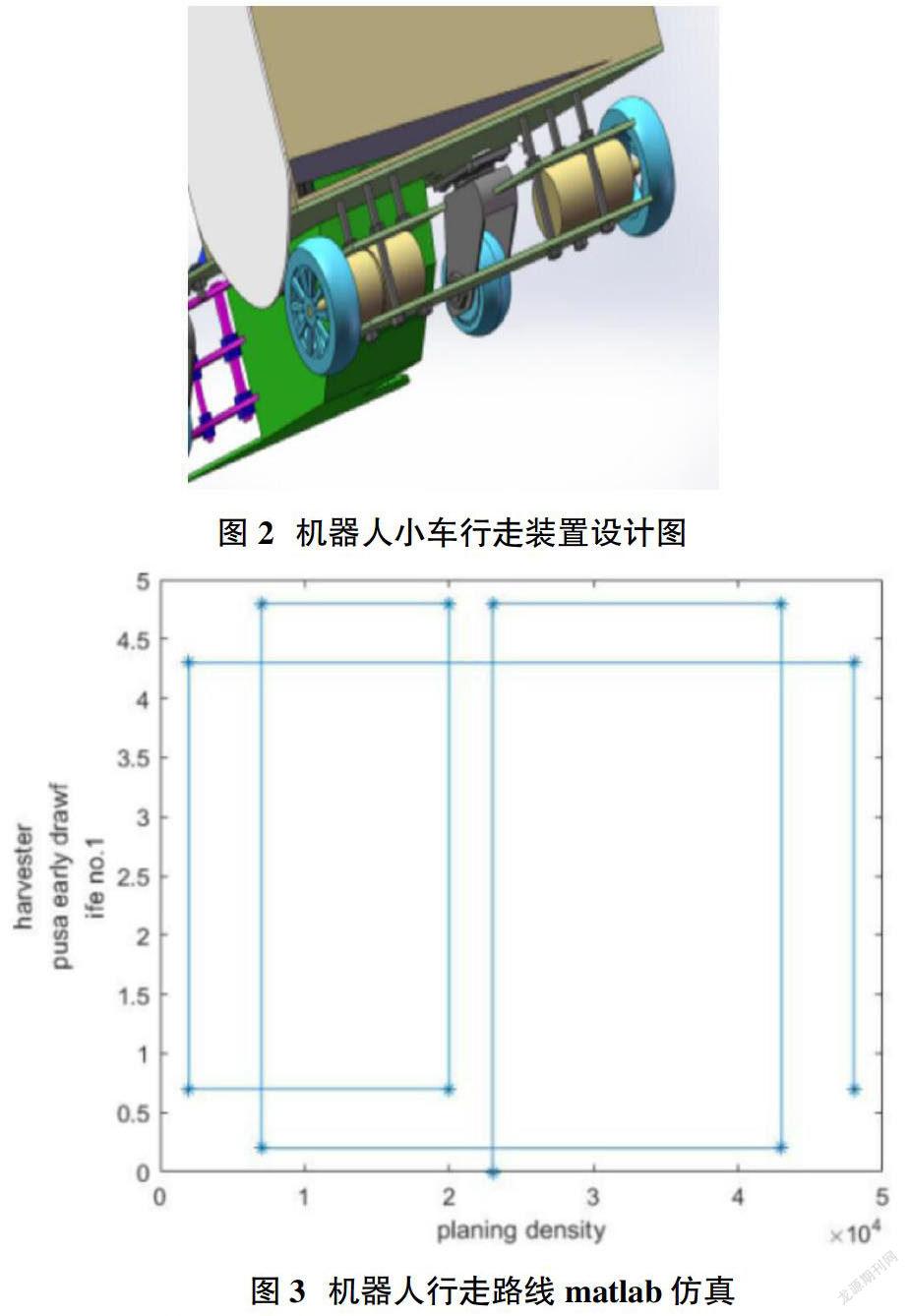
行走机构采用双后轮制动,在车底板下共有四个车轮,两个后轮各自连接两个直流电机,通过电机提供动力来源,再由编码器控制直流电机正转和反转来实现车的转向。两电机同向转动时车直线行驶,两电机不同向转动时车开始做转弯动作,如图2所示,小车路线仿真如图3所示。
1.3 抓取运球装置
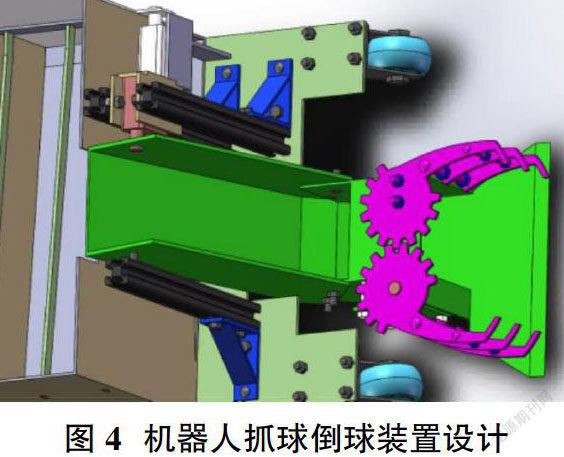
根据夹持物是球型,采用夹持型机械手,由一对齿轮、六个铜柱以及4个用亚克力板制成的机械手爪组成,此机械手爪可自由展开或闭合。运动机构,使手部完成升降,收缩和各种移动来实现手部对高尔夫球位置的改变。此机械手灵活性较强,通用性较广,结构简单,制作价格低,如图4所示[3]。
2 机器人电控、动力元件选择
经过惯量与力矩归算可得:T=0.225N·m,则选取电机转矩T电=0.29N·m的直流减速电机。经过对机械臂惯量与力矩归算可得:扭矩T=6.072kg/cm2,则选取扭矩为T= 13kg/cm2的MG995型舵机。
3 传感器选择
3.1 光电开关
由于机器人需要进行对墙壁、网球、高尔夫球及球筐的识别,同时进行比赛任务,机器人分别在前部、后部安装了红外线光电开关,用来检测障碍物以及根据得到的信号进行壁障。利用被检测物体对光束的遮挡或反射,光电开关将输入电流在发射器上转换为光信号射出,接收器再根据接收到的光线的强弱,或有无对目标物体进行探测。
3.2 HC-SR04超声波传感器
在机器人执行任务的过程中,尤其在机器人放球的过程中,需要精确地将机器人定位与球筐附近,以实现将网球或高尔夫球精准地放入球筐,完成任务。
4 电源及接口选择
4.1 电源选择
根据所选电机的额定电压为12V,则机器人电源选用主电源为:12V锂电池组,同时为了保证机器人始终保持额定运行速度,且同时实现舵机、光电开关等传感器的正常运作,本次项目同时还采用了副电源为9V电池。
4.2 接口选择
采用L298N电机驱动器:UNO MEGA 2560控制器;直流減速电机(带编码器):L298N电机驱动器;舵机:UNO MEGA 2560控制器;光电开关:UNO MEGA 2560控制器;超声波传感器:UNO MEGA 2560控制器。
5 结论
经装配的智能小车工作性能良好,通过实践操作使学生了解并关注智能机器人,在学习智能机器人编写程序的过程中可以学到科学和高效的学习方式,提高逻辑思维能力和规划能力,并具备发现问题、思考问题和解决问题的各种能力。
参考文献:
[1]张莉,王江华.以机器人竞赛为平台 提高大学生创新实践能力[J].科技风,2019(26):32,35.
[2]吴悦.仿人机器人的设计与竞赛应用[J].电子世界,2019(23):136-137.
[3]郑青斐.一种FTC竞赛机器人的设计和组装[J].电子世界,2015(15):128-129.