基于机器视觉的多维智能光路搭建系统
2020-09-10高智龙魏功祥郁梦婷郑锟王樱烨王明硕
高智龙 魏功祥 郁梦婷 郑锟 王樱烨 王明硕
摘要:光学是一门对实验结果精确度要求高和对实验外部条件要求严格的学科。到目前为止,由于实验精密仪器设备持续地更新换代,并且由人体发出的光信号,热信号以及声波对精确实验结果的影响日益显著。本文提出一种基于多维度机械臂开发的系统,该系统遵循光电设计、人工智能理念,主要借助Python语言开发程序,同时嵌入OpenCV作为视觉处理模块,优化算法。该系统最终实现自主完成识别夹取实验所需目标器件,按照程序规定路线运动至实验平台并放在指定位置,进行对光路的搭建矫正,以及对实验数据的记录以及传输。
关键词:机械;OpenCV;算法
引言
绝大多数传统光学实验室需要高级洁净无尘实验室,在实验过程中需要保持高精密的光学环境,屏蔽大多热源,光源等环境的干扰,但是由人体所发出的光信号,热信号以及声波对无尘洁净实验室的光环境,热环境干扰非常严重。
相对于光学摄像头测距、双目测距功能已经开发完善,但其应用主要针对大众。针对实验室级识别的系统开发较少,暂无成型系统。
1目标物检测算法
1.1RGB与HSV色彩空间转化
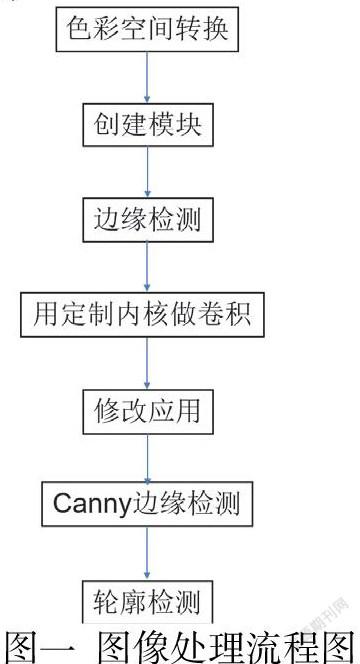
在机器视觉图像处理方面,图一中的色彩空间转换由于RGB图像与人视觉感知相差甚远,通常把RGB色彩模式转换为HSV色彩空间,利用图像的色(Hue)饱和度(Saturation)与明度(Value)来对目标物体进行检测与提取[1]。其中H分量突出反映了图像的色彩变化情况,能有效区分图片的前景和后景;S分量突出体现了图像边界和颜色变化;V分量则反映了图像中的亮度变化。
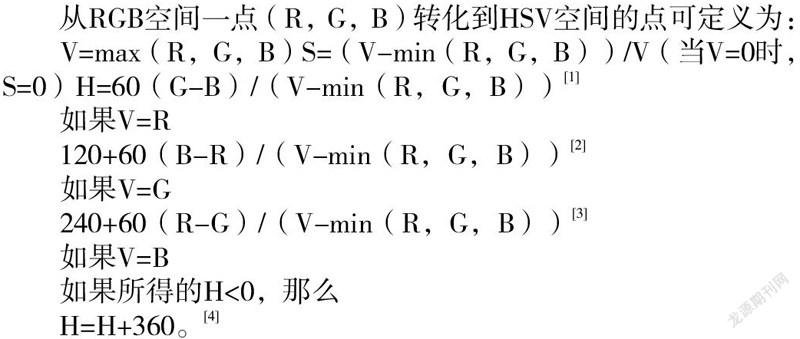
从RGB空间一点(R,G,B)转化到HSV空间的点可定义为:
这样色调信息H的范围为0°~360°。V和S的范围为0~1。
RGB和CMY颜色模型都是面向硬件的,而HSV(HueSaturationValue)颜色模型是面向用户的。
HSV模型的三维是从RGB立方体演化而来的一种模型。设想从RGB沿立方体对角线的白色顶点向黑色顶点观察,从而可以看到立方体的六边形外形。六边形边界表示色彩,水平轴表示纯度,明度沿垂直轴测量。
1.2形状特征分析算法
OpenCV是一个基于BSD许可发行的开源跨平台计算机视觉库,可以在Linux、Windows、Android和MacOS操作系统上运行。它的优点在于轻量级且高效,由一系列C函数和少量C++类构成,同时提供了Python、Ruby、MATLAB等语言的接口,从而实现很多图像处理和计算机视觉方面的通用算法。本论文通过视觉检测方案利用OpenCV2中Eigenfaces、LBPH、FLANN、HOG、BOW等算法对图像进行分析、特征图像剪裁、匹配阈值计算。
将目标对象创建SIFT实例,利用FLANN建立特殊目标特征矩阵图像[2]。通过BOW训练器,与SIFT特征进项配比实现目标检索。
1.3基于BOW与SVM的目标识别代码
声明基础路径:导入模块,声明训练图像基础路径,避免因不同设备训练数据所在地址不同,需随时修改。
创建SIFT实例:关键点提取,特征提取。
创建基于FLANN匹配器:使用算法cv2.FLANN-INDEX-KDTREE进行特征匹配。
创建BOW训练器、初始化BOW提取器:为训练器设定簇数,指定BOW类的输入为视觉词汇,以便在测试图像中检测到。
SIFT特征提取并对描述符进行返回:将图像经灰度处理后获取SIFT特征。
BOW训练器准备完毕。
返回指定词汇:选取八张图像,调用cluster函数,执行k-means,对词汇进行分类和返回,返回指定词汇,便于描述符的提取。
返回描述符:设定一个图像路径为声明函数参数,返回经BOW提取器计算所得的描述符。
生成样本标签:创建两个分别对应训练数据和标签的数组,并用描述符进行填充,生成正负样本标签。
创建SVM实例进行训练:将训练数据和标签放入数组储存,定义函数显示并返回结果。定义、读取两个样本图像路径中的图像文件并放入数组中后,传给SVM,预测结果。
2目标点运动方式
2.1运动控制框架
借助搭载了Linux系统的树莓派控制多维度机械臂,运用树莓派,通过利用PWM脉冲宽度调制技术做到对多个舵机的准确控制从而对机械臂的转动与伸缩控制。通过机器视觉准确识别物体,同时运用单目测距算法,SVM算法来将视觉信息处理为数字信息,并将其传输给树莓派,树莓派将其处理为相应的脉冲宽度信号给相应的舵机从而实现多维度机械臂精确夹取目标。
2.2机械臂控制主程序
系统具有人工操作模式选项,加入可关闭的语音系统对初次使用者进行引导,防止由于不熟悉系统的操作程序而出现的错误操作。人工操作模块的引入使得系统的操作者有第二种选择,不用去学习如何向系统中输入要夹取的器件即可使用。
总结:本文首次将機器视觉引入实验室中,搭建自动无人化实验室,首次实现远距离遥控精确智能搭建光路的智能化操作。对光学器件进行拿取,实景操作验证夹取与放置目标物体具体位置的准确性,从而做到无损伤夹取光学器件。实用性强,可开发性强,借助Python编写程序,可移植性高,包容性强。在树莓派中有着系统所需的所有程序,相应模块都有着详细的注解。这也就保证了系统的再一次开发的潜力。
参考文献:
[1]陈兴,刘卫东,乔明胜,等.基于FPGA的色彩空间RGB与HSI的相互转化算法[J].真空电子技术,2008,16(05):18-21.
[2]李娜,安彦波,余志伟,等.基于OpenCV的物体定位与捕捉系统设计[J].机械设计与制造工程,2019,48(03):85-88.
[3]李凤.基于ROS的机械臂控制系统设计[J].自动化技术与应用,2018,37(11):72-76.
[4]张伟业,张炜,华龙新,等.一种新型的桌面级机械臂[J].中国科技信息,2018(16):53-55.
(山东理工大学 山东淄博 255000)
