基于多源遥感的矿区沉陷积水研究
2020-09-10雒瑞健
雒瑞健

摘 要:本文以矿区沉陷积水为研究背景,基于多源遥感技术,通过LBV变换和LBV变换的最小二乘混合像元分解提取方法实现了对沉陷积水面积、深度的实时测量,具有重要的现实意义。
关键词:矿区沉陷积水;多源遥感;LBV变换
传统的井巷开采会造成地面沉陷,沉陷区域积水问题会导致矿区地表可耕种面积减少,对生态环境造成破坏的同时,影响了当地经济的发展[1]。为此,诸多学者对矿区沉陷积水进行了研究,基于多源遥感技术可以实现对积水区域的实时监测,减少传统人工测量过程中人力物力的投入,实现区域内积水的实时变换情况。本文基于多遥感技术,不仅实现了对积水面积区域变换的测量,同时实现了不同时间积水深度的变换,为矿井治理沉陷积水提供了重要的参考。
1 遥感图像预处理介绍
我国煤炭资源多采用井巷开采,传统的井巷开采将带来地面沉陷等灾害,地面沉陷是造成沉陷积水的主要原因。积水对矿区经济发展及居民生活有重要影响,沉陷带来的积水问题造成可耕地面积的持续减少,耕地面积的减少将持续影响土壤的物理化学性质,进一步扰乱生态系统的稳定性。目前多数矿井采用人工监测的方法,投入大量的人力物力,并不能实现实时精确的测量,随着遥感技术的发展,借助多源遥感技术对矿区沉陷积水进行实时监测减少了人力的投入,且实时监测便于对长期积水过程动态监测,减少地面起伏的影响,具有良好的经济效益。
本文中遥感成像技术依赖于Landsat卫星实现,基于Landsat卫星可以实现多光谱的分辨,分辨范围达到30m。考虑到云量条件,需进行辐射和地形矫正,通过矫正工作,可降低薄云因素的影响,间接提高了测量的精度。对于辐射矫正而言,主要目的是减少大气层散射影响,通过辐射矫正,对于不同太阳照射角度下不同地形的地面起伏可以实现准确的电磁波测量,辐射矫正结束后,需及时进行大气矫正,大气矫正的步骤如下:首先建立辐射文件夹,根据反射路径的不同,将大气矫正的文件存放到对应的文件路径中,基于自动获取的中心维度,选择对应的传感器类别,如果传感器自动获取过程失败,则根据时间,在遥感原始数据文件夹中获取大气模型参数,根据大气模型确定传感器类别。
辐射和地形矫正只是减少元信息造成的误差,对于图像成形的几何变形,需要单独进行几何矫正。几何校正的原理是根据图像在坐标系中的位置,经过矢量化处理,获得矢量处理后的文件,随后在矢量文件中进行坐标系的转化,实现了几何矫正。
在实际监测过程中,使用单一传感器数据容易造成分辨率低下、成本高的现象,因此需要多源遥感进行不同遥感数据的测量,通过将不同遥感数据整合得到增强后的图像融合效果。本文中采用Gram-Schmidt Pan融合方法,该融合方法对于地貌变形较大的区域可以实现多光谱和高光谱的融合,即使信息采集色调变换较大,通过PCA信息采集可以减少波段限制,保持图像空间纹理的清晰性,实现高保真特征。
图像融合后需要进行多波段合成操作,多波段合成是将分辨率相同、行列数相同的波段进行融合形成新的图像,多波段合成的优势在于可以实现同一数据下多波段的合成,也可以实现不同数据下不同波段间的合成。以矿区实际监测数据为例,进行图像变换和波段合成,得到图1所示的结果。从图像变换采用的是LBV变换方法,将图像分别进行L变换图像,B变换图像,V变换图像,将三个变换后的图像经过波段融合得到最后的波段合成图。
2 基于LBV变换的最小二乘混合像元分解提取方法研究
本文中多源遥感技术主要用于矿区沉陷动态水的监测,而遥感技术获得的图像是混合像元,为了得到矿区沉陷水的动态变换情况,需要对混合像元进行分类。
图1为混合像元分解流程图,从图中可以看出,进行分解前需要对图像进行预处理,图像的预处理工作已在上文阐述,预处理完成后,获取端元波普,根据端元波普的获取进行分解模型的选择,分解模型多种多样,本文中基于最小二乘混合像元分解,因此选择线性模型。
分解流程的关键在于端元的获取,端元的准确获得可以实现对水体、植被的准确获得,便于实现对沉陷积水的监测。基于LBV的图像预处理可以充分显示矿区地表特征,地表事物的总辐射水平、红外光辐射水平及地表事物波段变换方向速度等信息都可以显示地物特征,水体、植被等特征都通过图像预处理显示。
图像中地物基本类型特征显示都是基于端元实现,而不同地物类型的面积则是通过丰度实现。端元的选择直接影响到像元最终的分解结果,本文端元的选择原则如下:端元数目最大与波段数相同,且保持相对的独立性;确保端元与波段数不相关。本文端元的选取是基于LBV变换,基于LBV的图像预处理有利于提取各地物的像元。基于LBV变换中的B变换,可以实现对水分状况提取,提取方法如下:将黑白图片进行灰度值分割,选取B值范围在-7586.0633-2140.6594,随后用指定的颜色标出水体部分,便得到水体区域面积。
对矿区沉陷积水的监测不仅仅是要实现对水体面积的获得,还要进行水体深度的测量。基于多源遥感软件中的反演水深,通过大气校正、水陆分离等操作获得水体深度参数。水深遥感的原理如下:太阳照射到矿区沉陷水域后,部分太阳光在反射作用下进入空气中,部分太阳光会折射入水中,在水体的散射作用下,部分太阳光会进入水体底部,经过水体底部的太阳光在二次反射作用下会被传感器获得。传感器获得的信息当中包含大气信息、水体反射信息等,通过大气校正消除大气信息干扰,利用水体反射信息获得水体实际深度值。沉陷积水实际深度获取步骤如下:调取对应日期的遥感影像,进行大气校正、水陆分离操作,基于底部反照率算法,选择DN值在0-1之间的相对水深值,然后建立图上像元与实际点水深的比值式,根据比值式获得实际点水深值。
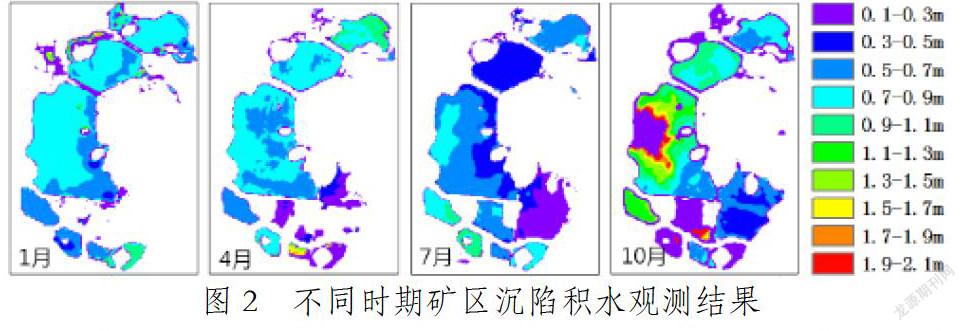
基于LBV图像预处理和水深遥感技术支持,对矿区沉陷区域内水体变换进行记录,得到图2所示的不同时期矿区沉陷积水观测结果,从图中可以看出,1月份沉陷区域的水体平均深度为0.8m;4月份沉陷区域的水体深度值与1月份相似,同样我0.8m;7月份沉陷区域的水体最深已经达到1.1m;10月份沉陷区域的水体最深已经达到2m,且水体面积不断增大,分析其原因,主要是因为季节性降水及冬季降雪等因素造成水体面积及深度的变换。
从观测结果来看,基于多遥感的矿区沉陷积水可以减少人工的投入,实现了对矿区沉陷积水的实时监测,节约成本的同时,具有良好的现实意义。
3 结论
以矿区沉陷积水为研究背景,在LBV变换和LBV变换的最小二乘混合像元分解提取方法基础上,对矿区沉陷积水面积变换和深度变换进行了研究,通過近一年的观测结果,准确判断了积水的变换情况,间接反映了沉陷区域土壤覆盖情况,为矿井对沉陷区域的管理提供了重要参考。
参考文献:
[1]钱丽萍.遥感技术在矿山环境动态监测中的应用研究[J].安全与环境工程,2008,15(4):5-9.
