基于高灵敏超导探测器的新型脉冲光高精度光纤陀螺技术研究
2020-09-09冯文帅于海成
王 巍,冯文帅,于海成
(1.中国航天科技集团有限公司,北京100048;2.北京航天时代光电科技有限公司,北京100094)
0 引言
光纤陀螺是一种没有机械转子的全固态惯性仪表,具有质量小、体积小、功耗低、可靠性高、工作寿命长、启动速度快、测量范围大、供电电源简单、环境适应性较强等诸多优势。此外,光纤陀螺还具有精度高、适用面广、适于批量生产及成本低等优点,且其精度可以覆盖从战术级到战略级、从军用到民用等多种领域。
由于光纤陀螺本身各种误差源和应用环境的影响,光纤陀螺输出信号中存在各种随机误差项,包括随机漂移和输出噪声。其中,输出噪声大小是衡量光纤陀螺精度水平的重要指标。从光纤陀螺敏感输入到信号检测,其过程中产生的噪声包括光信号自身的噪声、形成干涉后的噪声及信号检测中产生的噪声。信号处理检测中,探测器光电转换会产生散粒噪声、电流-电压转换电阻的热噪声、信号处理的量化噪声以及前置放大器的噪声等。相对光电噪声而言,光纤陀螺Sagnac效应信号本身却相对微弱,如输入角速率0.001(°)/h对应的相位差为0.018μrad,光信号到达探测器的光功率一般小于100μW,经过光电转换后调制在载波信号上的有用信号幅度通常在微伏(μV)量级,而探测器的输出噪声电压为毫伏(mV)量级[1]。此外,现有陀螺典型工作方案的精度距离理论光学噪声尚有1倍以上的差距。因此,为了提高光纤陀螺的精度性能,需要对噪声进行分析和分类,针对高精度光纤陀螺的组成特点,本文提出了一种新型的探测器及其陀螺技术方案。
1 光纤陀螺噪声机理研究
1.1 高精度光纤陀螺噪声分析
高精度光纤陀螺的精度极限主要由光纤陀螺检测噪声决定,一般可用角随机游走系数来表征。光纤陀螺的角随机游走主要由两部分构成,即光路干涉信号的信噪比和信号处理引入的噪声。光路噪声包括光电探测器的热噪声、光电转换的散粒噪声和光源拍频引起的相对强度噪声(Relative Intensity Noise,RIN);信号处理过程的噪声取决于信号处理电路多个环节的参数,包括运算放大器的输入电流噪声、输入电压噪声、A/D采样转换引起的噪声、D/A转换器的量化噪声以及输出数据的量化噪声[1]。
总噪声iN主要包括热噪声ither、 散粒噪声ishot、相对强度噪声iRIN等光路噪声,以及运放的输入电流噪声iIamp、运放的输入电压噪声iVamp、A/D转换的噪声iAD、D/A转换的噪声iDA和量化噪声iQ等电路噪声。光纤陀螺电路中的各项噪声比光纤陀螺光路噪声小1~3个数量级,对光纤陀螺的影响较小[2]。因此,精度极限主要由高精度光纤陀螺的光路噪声决定。具体的噪声分布如图1所示。

图1 各噪声在脉冲光高精度光纤陀螺框图通道中的分布Fig.1 Distribution of various noises in the pulsed light high-precision FOG
(1)热噪声
热噪声源自于探测器的暗电流和探测器跨阻抗放大器反馈电阻的Johnson热噪声,热噪声可以表示为
式(1)中,idark为光探测器的暗电流,k=1.38×10-23J/K为Boltzmann常数,T为绝对温度,RL为探测器的内阻,e=1.6×10-19C为单个电子电量。
(2)散粒噪声
散粒噪声是光子转换为电子时产生的随机噪声,是没有办法消除的噪声。散粒噪声与注入探测器的光功率大小有关,其引起的光电流噪声可以表示为

式(2)中,ipin为探测器的电流。
(3)相对强度噪声
采用宽带光源时,探测器上相对强度噪声引起的电流噪声可以表示为

式(3)中,Δv为光源的频谱宽度,它和光源光谱宽度Δλ的关系为

式(4)中,c为光速,λ为光信号波长。
陀螺的噪声性能取决于信号的信噪比,而理论信噪比为灵敏度与单位带宽内噪声比值的平方,忽略热相位噪声和量化噪声,信噪比SNR可以表示为[3-4]

随机游走系数和信噪比的关系可以表示为

式(5)~式(7)中的参数定义如表1所示。下面举例高精度光纤陀螺各噪声对光纤陀螺随机游走系数的影响,各参数取值如表1所示。
图2为不同相位偏置下光纤陀螺各噪声对随机游走系数的贡献。由图2可知,随着相位偏置的增加,陀螺的随机游走系数逐渐减小。在高精度光纤陀螺的典型调制深度7π/8下,光源相对强度噪声、探测器散粒噪声和热噪声导致的光纤陀螺的随机游走约为 3.4×10-5(°)/h1/2、 1.8×10-5(°)/h1/2和 1.3×10-5(°)/h1/2。当相位偏置进一步降低时,陀螺的随机游走系数受限于热噪声,将无法进一步降低,甚至将出现噪声增加的情况。
为了进一步提升光纤陀螺的精度,对干涉仪的散粒噪声、相对强度噪声和热噪声以及电路检测噪声均需进行有效地抑制。

表1 高精度光纤陀螺典型设计的参数Table 1 Typical design parameters of high-precision FOG

图2 不同相位偏置下光纤陀螺各噪声对随机游走系数的贡献Fig.2 Contribution of FOG noises to ARW coefficient under different phase modulation
1.2 光纤陀螺连续光因调制变化引起的尖峰脉冲对陀螺的影响分析
光源发出的连续光在调制信号的阶跃处产生周期性的 “尖峰”。干涉光强的 “尖峰”是无用的噪声信号,在传统的光纤陀螺信号检测电路中,“尖峰”信号和携带角速度信息的有用信号都被探测器转换为电压信号,故探测器输出的电压信号中也存在着周期性的 “尖峰脉冲”。
由于尖峰脉冲幅值较大,一般会导致前置放大器的迅速饱和,使前置放大器不能工作在线性放大区。同时,前置放大电路中使用的运算放大器不是理想的器件,其从饱和工作状态过渡到线性放大工作状态需要一定的时间,这会导致探测器输出信号的丢失,进而影响光纤陀螺的精度性能。
“尖峰脉冲”的振铃效应使得其后端信号产生阻尼振荡,对光纤陀螺的采样造成干扰。高低温下由于光纤环光纤长度以及折射率的变化,“尖峰脉冲”的宽度会发生改变,使得 “尖峰脉冲”对有用信号的影响也随着温度变化。离 “尖峰脉冲”越近,这种影响越严重[5],如图3所示。

图3 探测器的 “尖峰脉冲”信号输出Fig.3 The “spike pulses” signal output of detector
试验结果分析[6],光纤陀螺连续光因调制变化引起的尖峰脉冲对陀螺精度的影响可达20%以上。因此,需采取有效的抑制措施减小该误差的影响。
1.3 探测器的噪声及其检测电路引入的陀螺误差分析
噪声电压是衡量光电探测器噪声性能水平的参数,定义为无光输入情况下光电探测器输出电压型号的有效值,高精度光纤陀螺用性能良好的光电探测器的噪声电压低于0.3mV。
在有光输入工作状态下,光电探测器模块的噪声包括热噪声、散粒噪声、1/f噪声。热噪声来源于载流子的无规则热运动,随温度升高而增加。散粒噪声包括暗电流散粒噪声和光子散粒噪声,前者是由于热激发作用而随机产生的电子所造成的扰动,这种噪声存在于所有光电探测器中;后者是由于每一瞬间到达探测器的光子数是随机的,光激发载流子产生的起伏散粒噪声。几乎所有光电探测器中都存在1/f噪声,它主要出现在大约1kHz以下的低频区,与光辐射的调制频率f成反比,故称为低频噪声或1/f噪声。在光纤陀螺中,当达到光电探测器的光功率低于10μW时,散粒噪声为主要噪声,光纤陀螺的灵敏度主要受光电探测器散粒噪声水平的限制[7-8]。
普通光电探测器的噪声较大以及非理想检测电路使光纤陀螺的随机游走系数比光路的理论计算随机游走劣化1倍以上,故需要采取更高灵敏度的探测检测方案及陀螺技术方案。
2 基于高灵敏超导探测器的脉冲光工作方法
2.1 脉冲光高精度光纤陀螺超导检测机理
普通光纤陀螺通常选用的光电探测器组件(PIntrinsic-N-Field Effect Transistor,PIN-FET)或雪崩光电二极管(Avalanche Photo Diode,APD)等探测器的检测噪声较大,影响了Sagnac信号的信噪比。超导纳米线单光子探测器(Superconducting Nanowires Single Photon Detector,SNSPD)是一种具有极限感知能力的新型探测计数器。SNSPD的核心结构超导纳米线蜿蜒覆盖于几到几百平方微米(μm2)的面积上,形成光子接收区。
SNSPD的基本原理为:由于超导Cooper对能隙仅兆电子伏特(MeV)量级,故单个光子就能破坏大量超导Cooper对,光子信号则被高灵敏地转换放大成脉冲电压信号。SNSPD的较高灵敏度可实现单光子的检测,SNSPD比APD探测器的灵敏度提升超过20dB,极大地提高了光纤陀螺探测器在微弱信号上的检测能力。超导探测器实现较高的灵敏度检测,其工作温度在绝对零度量级且建立在脉冲光基础上。若陀螺使用连续的光信号,将使其高灵敏的检测能力下降。
因此,本文提出的脉冲光高精度光纤陀螺技术方案将光纤陀螺中连续的强光转换为脉冲光,采用超导单光子探测器实现超高灵敏的脉冲光探测,大幅降低了干涉仪的热噪声等。同时,避免了不同本征周期间因探测器输出电信号中 “尖峰脉冲”引起的误差,进一步提高了电路的检测水平。
2.2 高精度光纤陀螺脉冲光高灵敏同步检测方法
为了实现高精度光纤陀螺的脉冲光信号高灵敏检测,本文提出了基于同步脉冲控制的陀螺全数字闭环处理方案,如图4所示。

图4 脉冲光高精度光纤陀螺信号处理电路结构示意图Fig.4 Schematic diagram of pulsed light high-precision FOG signal processing circuit structure
由陀螺FPGA控制陀螺脉冲光调制、超导探测器的开启与关闭、A/D采集、信号解调和调制等。
光纤陀螺光源的脉冲光高速调制及超导探测时序控制如图5所示,具体时序控制过程如下:
1)陀螺FPGA发出同步信号控制光源,产生符合探测器高灵敏检测要求的脉冲光;
2)陀螺FPGA发出同步信号控制相位调制器(通常为Y波导集成光学器件),产生相位调制电压信号,脉冲光经过陀螺光路后产生带有角速率信息的干涉光脉冲信号;
3)陀螺FPGA发出同步信号开启超导探测器,实现对陀螺的干涉光信号高灵敏检测,完成检测后关闭超导探测器,以保持探测器下一次高灵敏的检测状态。
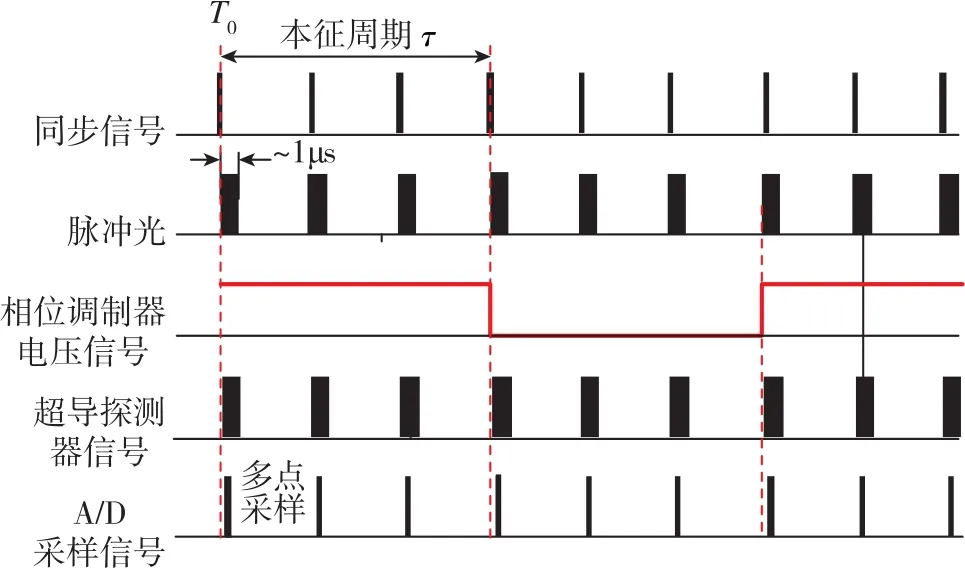
图5 光纤陀螺光源的脉冲光高速调制及超导探测时序Fig.5 Pulsed light high-speed modulation and superconducting detection timing of FOG
2.3 高精度光纤陀螺低RIN的脉冲光产生方法
为了进一步降低光纤陀螺的随机游走系数,考虑到光源相对强度噪声(RIN)占陀螺光路噪声的比例较大,故本文实现的脉冲光为基于低RIN的脉冲光,其较低的RIN是通过半导体光放大器(Semiconductor Optical Amplifier,SOA)来实现的。
半导体光放大器在结构和原理上与半导体激光器类似:结构上,两者都由有源区和无源区构成;原理上,两者都是基于受激辐射或受激散射原理来实现入射光信号放大的一种器件,但半导体光放大器没有光学界面反馈,不构成激光放大所需的谐振腔。半导体光放大器的光学增益通过泵浦电流在有源区产生载流子粒子数反转建立。目前,大多数半导体光学放大器基于P-N双异质结结构,主要用于现代光纤通信系统中的光开关、波长转换和在线放大器等方面。
半导体光放大器通过受激发射对输入光进行放大。当增加输入光功率时,由于输入光受激发射的消耗,半导体光放大器中的载流子密度下降,从而导致半导体光放大器增益下降。这种增益下降也就是半导体光放大器的增益饱和,它引起了放大特性的非线性[9]。
通常的半导体光放大器抑制光源相对强度噪声方案如图6所示。在光源和光纤陀螺其他光路之间增加半导体光放大器,通过调整光源输入光功率、半导体光放大器的驱动电流、温控工作点使SOA工作在饱和放大区,降低光源进入光纤陀螺的相对强度噪声。选择合适的工作点,可以降低相对强度噪声10dB以上[2]。

图6 常见的半导体光放大器抑制光纤陀螺相对强度噪声方案Fig.6 A common scheme of SOA to suppress the RIN of FOG
高精度光纤陀螺使用的半导体光放大器典型产品如INPHENIX公司的工作波长为1550nm的IPSAD1501-5110型半导体光放大器,实物如图7所示。

图7 半导体光放大器实物图Fig.7 Physical picture of SOA
在半导体光放大器实际使用中,低偏的掺铒光纤光源(消光比<0.1dB)经由SOA放大后,光源消光比通常达1dB~3dB,光谱也发生了一定的变化,故在使用过程中需对陀螺光路进行消偏与光谱整形[2]。根据IPSAD1501-5110型SOA器件的测试结果和理论计算,光源相对强度噪声抑制效果可超过12dB。
3 基于脉冲光工作方法的光纤陀螺精度仿真结果
3.1 基于脉冲光工作方法的光纤陀螺技术方案
基于上述理论分析结果,本文提出的基于脉冲光工作方法的光纤陀螺技术方案如图8所示。在经典的混偏式光纤陀螺中增加了半导体光放大器及其控制电路,即实现脉冲光的工作方式,显著降低了陀螺的光源相对强度噪声。技术方案中使用了超导探测器进行脉冲光的高灵敏检测,降低了陀螺的热噪声,并避免了连续光因调制变化引起的尖峰脉冲对陀螺信号的影响。

图8 基于脉冲光工作方法的光纤陀螺技术方案Fig.8 Technical scheme of FOG based on pulsed light
3.2 基于脉冲光工作方法的光纤陀螺精度仿真分析
(1)超导探测器对热噪声的抑制效果分析
在暂不考虑探测器检测信噪比的影响且其余参数选择同表1一致的前提下,对普通探测器在室温(303K)和超导探测器在绝对零度附近(10K)条件下的陀螺随机游走系数进行仿真分析,结果如图9所示。

图9 使用超导探测器后陀螺随机游走系数的变化Fig.9 Difference of ARW coefficient after using superconducting detector
由图9可知,基于超导探测器的陀螺随机游走系数指标得到进一步减小,随机游走系数最小值从 3.53×10-5(°)/h1/2降低到 2.52×10-5(°)/h1/2,减小了约28.6%。
(2)使用半导体光放大器方案的RIN抑制效果分析
在使用上述超导探测器的仿真研究基础上,通过半导体光放大器可降低光源的相对强度噪声(RIN),理论上光源相对强度噪声抑制效果可超过12dB。本文结合目前报道的试验结果[2],将相对强度噪声的抑制比选取为3dB,其余参数选择同表1一致。如图10所示,使用普通探测器(303K)和超导探测器(10K)作为对比曲线,使用超导探测器+低RIN光源为本次仿真曲线。
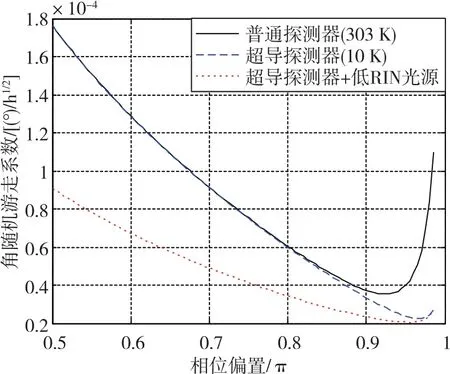
图10 采用低RIN光源的陀螺随机游走系数对比图Fig.10 Comparison of ARW coefficients with low RIN pulsed light
由图10可知,使用超导探测器+低RIN光源的陀螺随机游走系数指标在不同相位偏置下均有明显减小,随机游走系数最小值降低至2.0×10-5(°)/h1/2, 减小了约 20.6%。
(3)使用基于超导探测器+低RIN脉冲光方案的陀螺噪声抑制效果分析
在上述超导探测器+低RIN光源的仿真分析基础上,将光源的连续光改变为脉冲光,避免了尖峰脉冲误差的影响,结合采用高灵敏、低噪声的超导探测器及其检测电路,显著降低了电路检测误差。根据理论分析与典型试验验证[6],可使光纤陀螺的随机游走系数进一步降低约20%,其余参数选择同表1一致。如图11所示,使用普通探测器(303K)、超导探测器(10K)和超导探测器+低RIN光源作为对比曲线,使用超导探测器+低RIN脉冲光为本次仿真曲线。

图11 采用低RIN脉冲光+超导探测器方案的陀螺随机游走系数对比图Fig.11 Comparison of ARW coefficient using low RIN pulsed light and superconducting detector
由图11可知,使用超导探测器+低RIN脉冲光方案的陀螺随机游走系数最小值降低至1.6×10-5(°)/h1/2,减小了20%。考虑到本仿真分析使用的半导体光放大器降低了光源相对强度噪声,选取的抑制比仅3dB,后续仍有较大的提升空间,陀螺的随机游走系数极限可进一步地降低。
4 结论
通过对高精度光纤陀螺的噪声进行分析,对影响高精度光纤陀螺随机游走系数检测极限的热噪声、检测噪声、尖峰脉冲以及相对强度噪声进行了误差分析与仿真研究。采用基于高灵敏超导探测器的新型脉冲光高精度光纤陀螺技术方案,可将光纤陀螺的随机游走系数检测极限从3.53×10-5(°)/h1/2降低到 1.6×10-5(°)/h1/2, 减小了约54.7%。本技术方案对超高精度光纤陀螺的检测精度极限进行了有重要参考意义的技术探索,为后续超高精度光纤陀螺的技术发展提出了研究方向。
