基于PCNN分层聚类迭代的故障区域自动提取方法
2020-09-04许晓路周东国朱诗沁罗传仙
许晓路,周 文,周东国,朱诗沁,倪 辉,罗传仙
(1.南瑞集团(国网电力科学研究院)有限公司,江苏 南京 211006;2.国网电力科学研究院武汉南瑞有限责任公司,湖北 武汉430074;3.武汉大学 电气与自动化学院,湖北 武汉 430072)
0 引言
在电力行业中,红外热像仪作为监测电气设备故障强有力的工具,是非接触式带电故障状态检测中重点采用的一种方式,其具有通用性强、操作便捷等优点[1]。目前,在输变电站等电力巡检场景中,红外热像仪基本上是巡检人员必备的在线检测工具,并对电气设备故障早期发现起到了显著效果。然而,目前大多数基于红外热像仪的电力故障判别仍采用人工观察、录入并上传至远程监测中心等处理。这对巡检人员现场工程经验、专业水平提出了更高的要求。此外,人工处理红外图像以及判别电力设备运行状态,在一定程度上会加长巡检人员巡检时间,且处理时极易出现因检测过程不连续而发生重复或漏检等情况[2-3],使得故障检测的效率受到了极大的影响。
目前红外图像处理技术成为了一种有效提升故障检测效率的方式。而且,随着无人机电力巡检的兴起,迫切需要在算法上对电力红外图像自适应处理,其中包含的核心内容有红外图像预处理、故障区域分析、故障设备辨识以及故障分类等。然而,故障区域的提取是最为基础且关键的一项技术,也是困扰国内外研究者最为经典的难题。从文献上看,研究的算法呈现出多样化特点,大致可分为:①图像阈值化,典型的如最大类间方差法;②图像像素聚类,如文献[4]采用红外图像灰度值聚类分析方法,提出了一种基于遗传模糊核聚类算法,然后根据聚类结果实现红外图像分割;③偏微分方法,该方法是通过建立一种偏微分方程的数学模型,令图像遵循偏微分方程求解并根据水平集理论进行演化,达到预期的效果,相比之下,该理论难度大,实时性差,因此很少用在故障区域提取领域中;④神经网络处理方法,旨在利用神经元对图像中像素的分类,特别是第三代脉冲耦合神经网络(Pulse-coupled neural network, PCNN)方法作为一种高效的智能处理算法[5],它可以在不需要训练学习的情况下将图像信息转换为脉冲信息,获得所感兴趣区域,但因参数设置不合理以及模型迭代规则与图像不匹配,使得该模型仍然需要进一步改善。此外,还有一些针对实际问题涌现出了多种不同的改进算法[6-14],例如文献[6]首先采用Otsu 经典阈值分割方法分离目标,再用改进后的直方图均衡法增强目标区域,为后续的故障辨识奠定基础;文献[7]提出了基于形态学的最大类间方差和Krisch 算子的图像分割方法。文献[8]通过对Meanshift 方法中权重的改进,采用了一种自适应阈值的聚类机制,实现热故障区域的提取。
然而,由于红外图像中电气设备故障区域内在的一些特性,例如故障区域内存在伪边界或故障区域灰度分布与背景灰度分布混叠,极易导致算法提取区域与实际故障区域产生大的偏差。为此,本文提出了一种电力故障区域自动提取方法。该方法以PCNN 为核心处理模型[14-15],借助其内在同步点火特性,通过建立聚类机制设置模型参数,进而可将整个红外图像分割成多个具有相似特性的区域。然后,根据最大均值所在区域,结合相似度评价方法对相似的相邻区域进行合并处理,最终获取故障区域,并通过真实电力设备故障红外图像测试,以及与现有算法的对比,文中方法具有较好的故障区域提取效果。
1 简化的PCNN 模型
脉冲耦合神经网络[14]是一种以猫等哺乳动物视觉为研究对象而建立的生物模型,因其具有视觉机理而被广泛应用到图像处理的各个领域。其中,模型内在的同步点火特性以及动态阈值机制,使得其具备了相似像素聚类的性能。然而,因其自身结构存在非线性特性以及内在参数设置的多样性和复杂性,使得PCNN 模型不得不依赖于统计或经验参数设置等方法,导致模型的图像处理性能受到一定的限制。为此,在常用的图像模型中,大多通过简化的方式构建PCNN 模型[15],如图1所示。

图1 简化的PCNN 模型图Fig.1 The simplified PCNN model
对比原始的PCNN 模型[15],不难发现,模型中依然保留了神经元的每个部分,即输入层,耦合层和脉冲输出层。输入层是神经元对外界信息的感知层,在该模型中,每一个神经元输入主要包含两个部分:①邻域神经元的脉冲输出Y;②像素灰度值信息,从而构成一个二维的神经网络。在耦合层,每个神经元对相邻点火的神经元进行耦合并进行加权放大神经元的内部活动,使得与邻域相似神经元发放同步脉冲。于是,在输出层中,通常采用阈值调制器,对于超过动态阈值的神经元则将Yij置为1,表示发生点火,形成脉冲。反之,则置为0,表示未发生点火。
进一步地,由图1可知,每个神经元可以用一个迭代的数学模型描述,归纳如下:

式中:Fi,j为反馈输入,它接收红外图像I区域空间中第i行第j列对应的灰度值Ii,j;M、N代表图像的行和列;L为连接输入,接收其邻域神经元加权的脉冲点火信息;pi,j表示PCNN 神经网络中位于神经元(i,j)的8 邻域Ni,j坐标;n为PCNN 当前迭代时刻;Yi,j[n-1]为前一时刻输出;βi,j为神经元(i,j)的连接系数;Ui,j为该神经元的内部活动强度;θi,j为神经元动态门限阈值,这里采用估计值描述。为邻域神经元与中心神经元(i,j)之间的权重,通常其值由下式确定[14]:

式中:||pi,j-(i,j)||2表示邻域位置pi,j与中心点(i,j)的欧式距离。
当PCNN 处理图像时,其每一次迭代都因像素的改变而需配置参数,这在一定程度上增加了PCNN 模型处理的灵活性,但另一方面也对参数配置和迭代机制提出了更高要求。为此,本文在简化模型的基础上,引入分层聚类机理[16],使得模型在迭代过程中将整个图像分割成多个具有相似特性的区域。然后,针对灰度特性较高的脉冲区域,结合边界检测算子对不具有强边界的相邻区域进行合并,实现红外图像中热故障区域的有效分割。
2 基于PCNN 分层聚类迭代的红外图像分割
为了增强模型对红外图像处理的适应性,通常需要对PCNN 模型的参数进行合理设置。其中,最为关键的参数包括:连接系数β,动态阈值θ。
2.1 简化PCNN 模型参数设置
2.1.1 动态阈值θ
为了获得脉冲输出,动态阈值θ决定了神经元发放脉冲的门限。通常,在输出层中,动态阈值与区域特性是有关联的。为了能够让邻域相似的神经元发放同步脉冲,即具有相似灰度的神经元进行聚类。在设置该参数时,采用当前迭代中的脉冲发放区域的均值作为该动态阈值的估计值,即:

这个阈值在一定程度上可以抑制内部活动值Ui,j小于均值的神经元,而对超过该阈值的神经元则发放同步脉冲,从而形成一种以均值聚类为点火机制的PCNN 图像处理模型。
2.1.2 连接系数β的设置
根据动态阈值参数设置可知,在均值聚类中,考虑到内部活动值Ui,j受限于邻域点火的神经元及其连接系数β,而权重值W设置采用的是一般配置方法。因此,相似神经元是否发放同步脉冲主要取决于连接系数β的设置。
为了与相应的阈值θi,j、输入层信息相关联,本文将其设计为:

式中:pi,j为神经元(i,j)的邻域神经元。进一步地,从式(8)可以看出,神经元门限值与其邻域输入信息Fpi,j的差分体现出点火门限与未发放脉冲的神经元的距离。因此,对于与邻域灰度相似的神经元,则可以有效聚类,反之,则不会因此被捕获而发生点火。
2.2 分层聚类迭代机制
在PCNN 模型图像处理中,本质上是通过迭代来完成对整幅图像的划分。一般而言,每次PCNN 模型迭代获得的输出信息只包含两种状态,即0 和1 状态,其中1 表示点火状态或发放脉冲,0 表示未点火。这种机制导致图像处理时,直接将整幅图像转换为二值图像。这对于多个潜在的目标区域而言,极容易因未发生点火而丢失。为此,本文提出了一种分层聚类迭代机制,目的是将未发生点火的区域进一步细分,使得在每一层中都分为点火区域和未点火区域,直至在最后一层中点火区域的均值和未点火区域的均值相差不超过设定的阈值,即停止迭代,其过程如图2所示。

图2 分层聚类迭代模型Fig.2 The model of hierarchical clustering
2.3 区域融合及最终输出
由图2可知,经本文PCNN 模型输出会将图像划分成多个区域,尽管在第一层中点火区域是最有可能为故障区域,然而在其邻域中,也可能存在故障区域,特别是在热故障区域分布不均匀的情况下。因此,为了能够较为完整的提取故障区域,获得最终的输出,本文结合边界检测方法,以及相似度评价方式对邻域区域进行处理,实现最终的输出。
令计算各个层点火区域的均值并排序,得到:

首先对图像进行高斯平滑处理,确保原图中边界不受噪声等干扰。令G为2 维高斯函数:

式中:σ为标准差;(i,j)代表横、纵坐标点第i行第j列;x,y表示x轴和y轴,则得到的平滑图像为:

式中:*表示卷积;G为高斯函数;I为红外图像。
其次,梯度的幅值和方向的计算。令梯度值为:
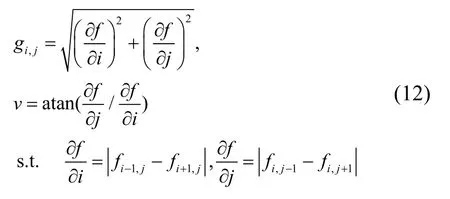
式中:∂f/∂i和∂f/∂j表示在行和列方向求差分。在沿着正负梯度方向v上的两个像素点(p,q), (m,n),当两像素点的灰度均值u小于中心点(i,j)的灰度值,则认为该点为强边缘点;而当该灰度值在[min(Ip,q,Im,n),u]区间范围内,且在中心点(i,j)的4 邻域中存在大于均值u的像素,则认为是弱边缘点。
基于所述边缘点的确定,可进一步对所生成的区域Φt处理,对相邻区域中存在强边缘点、弱边缘点等情况进行分析。
对于存在强边界的区域,通常不需要做进一步的处理。考虑到两个区域之间可能存在强边界点和弱边界点,本文设置一个比例系数,即强边缘点的占比超过90%,则直接判定相邻区域不是故障区域。反之,则需要进一步根据区域均值判定。本文定义参数η作为区域相似度度量:

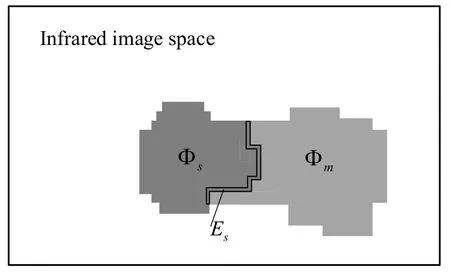
图3 相邻区域边界描述Fig.3 Description of neighboring regions
考虑到PCNN 在聚类结果中,Es代表着整个Φs区域中实际灰度值可能较低的一个区域。另外,因红外图像中可能存在灰度分布不均匀,使得本文PCNN分层迭代中将区域分割成了多个相邻部分。为此,通过比较Es区域的均值与Φm的均值来判断两个区域的相似性,当二者比较相近时,认为两个区域具有相似性,故引入η参数来评价两个相邻区域的相似性。当η值越大,代表两个相邻区域均值差别比较大,可认为区域Φs与Φm越不相似;反之,则相似度会随着η减少而增加。这里,规定η值在10%以上时便认定区域不具有相似性,不进行区域合并,反之则进行区域合并,得到:

然后重新计算区域Φs均值,并对已处理的区域进行标记。
针对由本文PCNN 所分割的其他区域,也同样从最高均值的区域开始,融合各个存在弱边界的邻域区域,直至遍历所有区域。
对各个区域按均值大小重新排序。为了避免图像中区域分割过细,对区域均值相差不超过门限值20的区域进行合并,最终得到分割结果。此时,将均值最高的点火区域作为提取结果。
3 实验结果及分析
为了验证文中方法对红外图像区域自动提取的有效性,采用简化的PCNN[18]、Meanshift 算法[19]与文中算法进行比对。所有算法均在MATLAB(2010b)上编程实现。
图4为3 幅典型的输变电线路故障发生的红外图像,各个图像中故障区域展现出高亮。然而由于红外图像分辨率低,图4(a)中故障区域周边存在模糊,且与整个区域相比而言较小;图4(b)中,故障区域的高亮部分与邻域存在明显的边界;图4(c)中,故障区域则因热传导而产生缓慢的变化。因此,对于完整提取故障区域而言,均具有一定的挑战性。
图5~图7给出了各个算法的提取结果。不难发现,文献[18]的PCNN 模型对于高亮度区域具有较好的提取效果,然而对于存在弱边界的情况,则处理效果并不优良。Meanshift 算法作为行业中比较经典且有效的算法,获得的结果基本上满足故障区域提取要求,但当存在弱边界情况时,也会出现一定的聚类偏差,例如对图4(a)的分类结果,使得部分故障区域丢失。而本文是通过分层迭代的方式,并结合聚类机制而获取的结果,尽管模型将整个图像分成了多个相似区域(每个区域用其均值进行替代),仍然能够有效地将各个区域有效分离。通过对弱边界检测分析,并经文中区域融合等处理,最终的结果如图8所示,从而验证了文中算法对区域完整提取的有效性。
另外,在处理速度上,与文献[18]相比,因增加了后续处理环节,使得在处理时间上,并不具有优势,具体运行时间详见表1所示,这需要后续进一步优化处理。
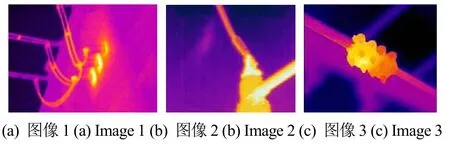
图4 电力设备故障红外图像Fig.4 Fault electrical equipment infrared images

图5 文献[18]PCNN 模型提取结果Fig.5 Segmentation results of infrared electric fault image using PCNN in literature [18]
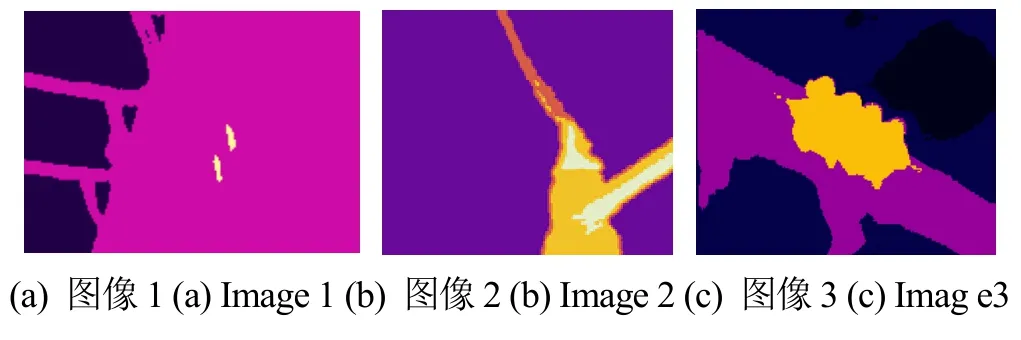
图6 Meanshift 分割结果Fig.6 Segmentation results of infrared electric fault image using meanshift algorithm

图7 本文PCNN 方法结果Fig.7 Segmentation results of infrared electric fault image using proposed PCNN method

图8 本文最终输出结果Fig.8 Final results of infrared electric fault image using proposed method

表1 各算法运行时间对比Table 1 The running time of test algorithms s
4 结语
本文提出了一种基于PCNN 分层迭代聚类的电力故障红外图像区域自动提取方法。该方法以PCNN为核心处理模型,通过引入聚类的方法对模型参数进行配置,并构建了多层聚类迭代的PCNN 处理机制,使得整个图像划分成多个具有相似特性的区域。为了能够较好地提取高亮度故障区域,采用了边界检测算子对区域的邻域进行处理,针对弱边界的区域,采用了一种相似度度量方式对相邻区域进行评价,进而获得最终的输出。最后,在真实的红外图像上进行测试,验证了本文算法能够有效获取电气设备故障区域,且与现有的一些方法进行比对,本文方法在故障区域的提取完整性上具有较好的效果。
