纯电动汽车加速踏板信号处理机制研究
2020-09-04郑润
郑润
(合肥工业大学,安徽 合肥230009)
1 加速踏板信号研究现状
在纯电动汽车加速踏板故障诊断技术研究中,采用非接触式霍尔传感器作为加速踏板位置传感器,并使用改进的一阶滤波算法对信号进行处理。为满足加速踏板的高诊断率和覆盖率需求,根据ISO 26262设计了一种应对加速踏板信号失效的安全机制,这些故障诊断研究提高了加速踏板故障诊断的可靠性和及时性[1-3]。
2 加速踏板信号解析
加速踏板硬件的两路踏板的5 V模拟信号电源由整车控制提供,整车控制器实时采集两路模拟信号的电压,从而识别加速踏板当前的状态和踏板的位置。
加速踏板信号处理机制如图1所示,整车控制器对两路加速踏板信号的处理分为两个模块:①加速踏板信号有效性判断。采集加速踏板传感器输出的AD信号,并将其转化为对应的电压信号,对转化的电压信号进行有效性诊断,确定用于计算加速踏板开度的电压值。②加速踏板开度计算。将加速踏板有效电压进行归一化处理,并进行故障诊断与控制,最后将计算后的踏板开度输出给扭矩处理模块进行扭矩计算。
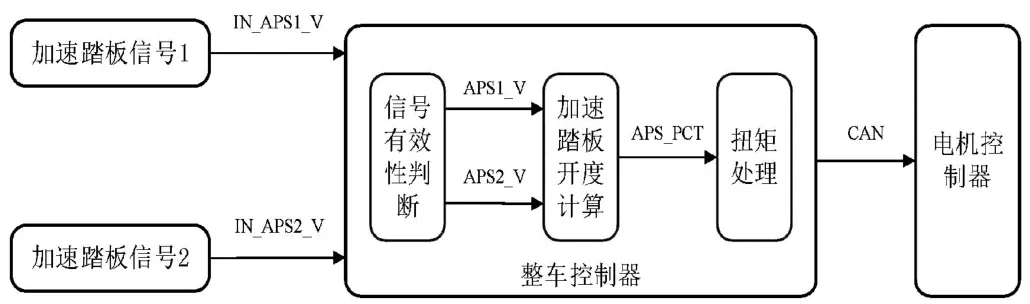
图1加速踏板信号处理机制
在加速踏板信号有效性判断中,首先将输入的AD值进行电压值转换,转换公式为:

式(1)中:PV_out为加速踏板实际的模拟电压值;Pin为基础层实时采集的AD值;Vmax为加速踏板模拟电压值所允许的最大值;Pin_max为采集的最大AD值。
对转换后的电压值采用滚动平滑滤波法进行滤波,滤波算法为:

式(2)中:Pout为当前输出电压值;Ttick为采样周期;Tenum为时间常数;Pin为当前采集的电压输入值;Ppreout为上一次输出的电压值。
而在加速踏板开度计算中,首先对有效性输出的两路踏板电压信号进行计算:

式(3)中:Aout为输出的踏板开度信号;Pin为经过有效性判断输出的踏板电压信号;Pzero为根据踏板特性曲线标定的开度下限计算值;Pup为根据踏板特性曲线标定的开度上限计算值。
将计算得出的开度信号经过故障诊断控制方可输出至扭矩控制模块,进行当前驾驶员需求扭矩计算。
3 加速踏板信号故障诊断
为了真实有效地反映出驾驶员对当前扭矩需求,对加速踏板信号的诊断必须快速准确,既不能因为故障诊断而牺牲精度,也不能因为故障诊断而将当前踏板开度延时时间过长,所以诊断算法必须选取合适。本文选择逻辑门诊断策略,该策略具有响应时间周期短、稳定性高、使用广泛、相对成熟等优点。
根据双路加速踏板输出的电压值特性进行分析,从而得出加速踏板信号的故障类型,具体诊断流程如图2所示。
短路故障诊断:根据加速踏板特性曲线可查得两路踏板信号的上限和下限值,并根据此值设定故障检测的上下限阈值。加速踏板的第一路信号区间值为[(0.75±0.15)V,(3.84±0.25)V],即当信号输入值为(0.75±0.15)V时,则认为第一路信号输入的开度为0%,当信号输入的值为(3.84±0.25)V时,则认为第一路信号输入的开度为100%。加速踏板第二路信号区间值为[(0.375±0.2)V,(1.92±0.3)V],即当信号输入值为(0.375±0.2)V时,则认为第二路信号输入的开度为0%,当信号输入的值为(1.92±0.3)V时,则认为第二路信号输入的开度为100%。将输入的两路踏板信号和设定的短路阈值进行比较,若大于设定的阈值则认为出现短路故障。
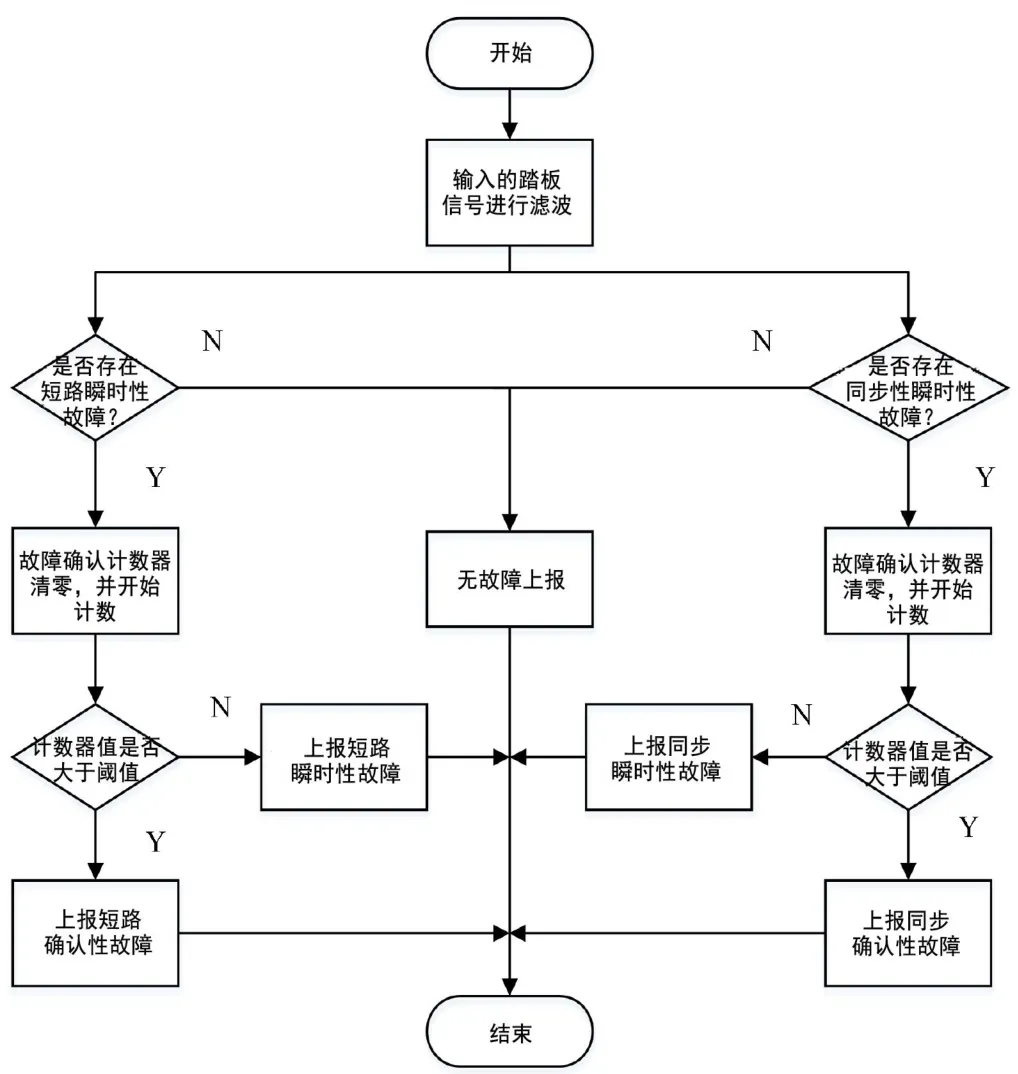
图2加速踏板故障诊断流程
同步性故障诊断:根据加速踏板特性曲线可知,第一路踏板信号值是第二路踏板信号值的2倍,根据特性曲线设定同步性故障诊断的阈值。将经过短路故障诊断输出的两路踏板信号进行分离,并将第二路踏板信号进行增益,将增益后的踏板信号和第一路踏板信号做差值处理,若得到的值不在设定的阈值范围内,则判定当前出现不同步故障。
故障确认:由于加速踏板的信号来源于电压型传感器,传感器的工作会受到周围环境的影响,例如温度、供电电压以及机械操作等,所以需要对诊断出的瞬时性故障进行故障确认,以免诊断有误。故障确认可利用防抖动处理机制,即在设定的时间里,若诊断出的短路瞬时故障和不同步瞬时故障在计数器累加超出设定的阈值时依旧没有得到清除,此时就可以认为踏板信号出现短路故障或不同步故障。将确认的故障标志状态传递给故障控制环节,以此来保证踏板信号的准确性以及整车的安全性。
4 加速踏板信号控制
为了防止加速踏板输入信号不符合特性曲线,需要制定合适控制策略进行信号处理,考虑到加速踏板采用双路信号输入,即硬件采用了冗余结构设计,所以采用容错控制思想。加速踏板信号控制一般采用容错替换法,根据加速踏板故障诊断模块输出的故障信息,给控制策略中替代参数设定权重,对权重参数进行计算得出加速踏板最终输出的开度值。
权重参数分别有第一路加速踏板信号值(APS1)、第二路加速踏板信号值(APS2)、上一时刻加速踏板开度值以及替代值,每一个权重参数在相应故障下的权重值如表1所示。

表1加速踏板故障控制权重值
加速踏板信号控制策略采用基于信号的控制率重构方式,重构算法中权重参数参考表1计算。当故障诊断模块输出信号存在瞬时性短路故障或不同步故障,则加速踏板信号计算值由上一时刻踏板开度值替代输出;当故障诊断模块输出信号存在第一路加速踏板信号确认性故障,则加速踏板信号计算值由第二路加速踏板信号值替代输出;当故障诊断模块输出信号存在第二路加速踏板信号确认性故障,则加速踏板信号计算值由第一路加速踏板信号值替代输出;当故障诊断模块输出两路加速踏板信号同时存在确认性故障,则根据整车安全要求设定的安全值替代加速踏板信号计算值;当故障诊断模块输出信号存在不同步确认故障,则根据整车安全要求设定的安全值替代加速踏板信号计算值;当故障诊断模块输出信号不存在故障时,则加速踏板信号计算值由第一路和第二路踏板信号值各取1/2计算后输出。
5 加速踏板信号仿真测试
按照加速踏板信号处理流程,在Matlab/Simulink中搭建加速踏板信号仿真模型,并进行了仿真测试,按照加速踏板信号处理机制设计测试用例,将设计好的测试用例注入进行仿真测试,得到的仿真测试结果如图3所示。
从图3中可知,在2.046 s和8.79 s时,加速踏板分别发生了加速踏板单路确认性电压故障,加速踏板故障诊断与控制系统可以很快进行踏板开度值切换,电机扭矩没有出现突变,扭矩梯度值基本平滑过渡,所以不会对驾驶平顺性产生影响。在15.519 s时,加速踏板发生不同步确认性故障时,整车控制器将当前计算的踏板开度值进行限制,由于当前车速值过高,需要进行限扭矩运行,扭矩平滑切换至27 Nm。在18.05 s时,加速踏板由单一确认性电压故障变成两路同时发生确认性电压故障时,整车控制器立即将开度值进行置零,此时整车立即进行0扭矩输出。在20.05 s时,加速踏板确认性故障消除时,即使开度值返回为实际输入值时,从整车安全角度出发,整车扭矩也必须进行0扭矩限制,整车等待进入下电模式。
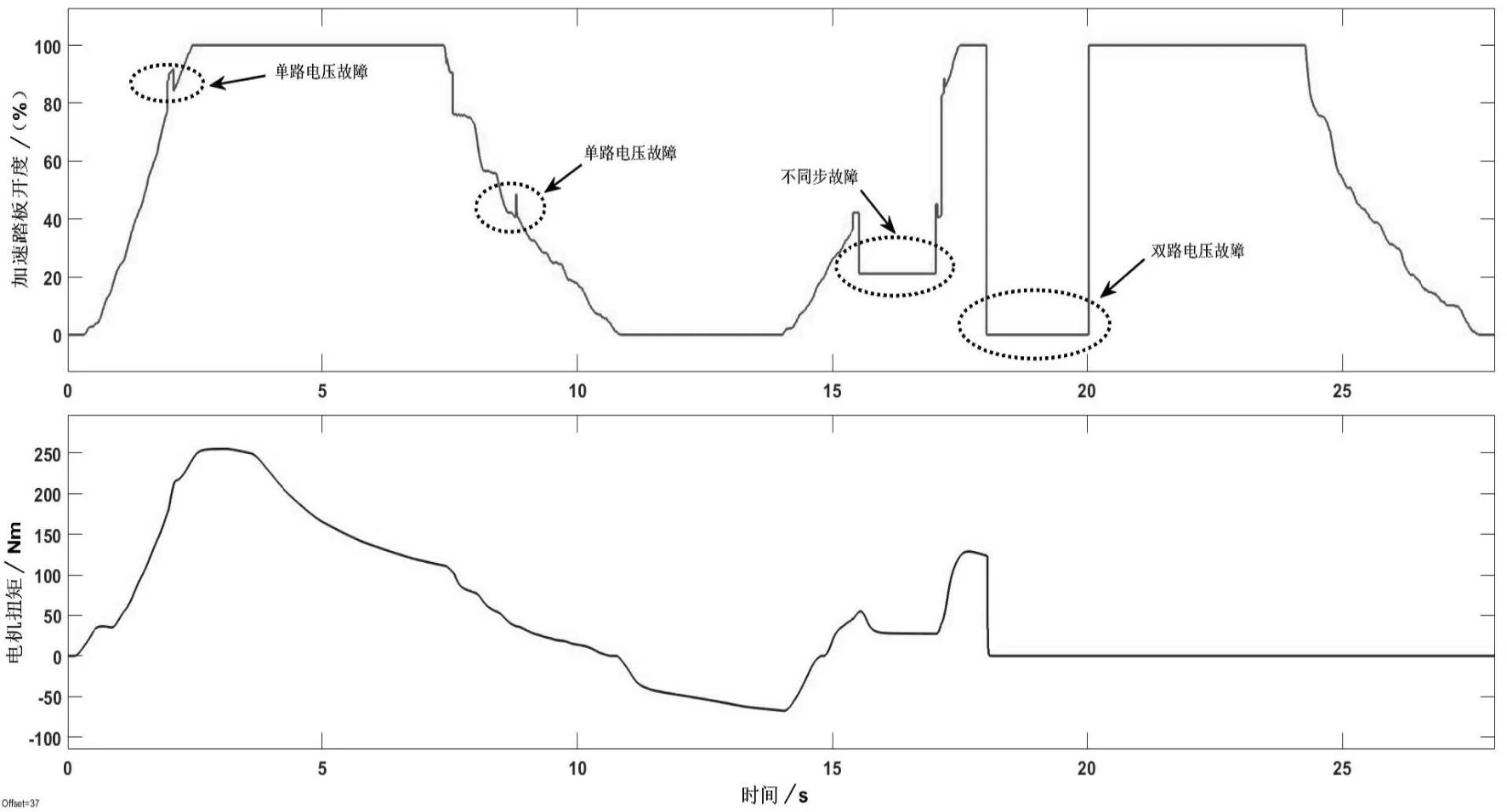
图3测试加速踏板开度输出
6 结论
根据加速踏板的仿真测试结果可以得出,按照本论文中提出的加速踏板信号处理机制可以比较理想地实现纯电动汽车对驱动安全的设计要求。