基于速度自适应的汽车电动尾门ECU系统设计
2020-09-04庞博
庞博
(华大半导体有限公司,上海 201210)
0 引言
随着汽车电子技术的发展与成熟,汽车逐步向舒适化和智能化方向发展,电动尾门已经成为各个主机厂在汽车产品设计、生产和销售过程中广泛应用和推崇的技术。目前汽车应用的尾门电动机构主要分为三种类型:第一种型式为电动撑杆式,第二种型式为摆臂连杆式,第三种型式为电动驱动铰链式。电动撑杆式电动尾门结构是目前汽车市场应用的主流型式,也是自主品牌采用最多的电动尾门型式,其核心模块为控制器、电动撑杆与吸合锁[1]。
基于撑杆电机的电动尾门ECU系统也分为单撑杆和双撑杆两种系统,双撑杆系统采用两根带有电机和丝杆的电动撑杆实现尾门的开启和关闭,单撑杆系统只使用一根电动撑杆。双撑杆系统因为是左、右撑杆协调一致、受力均匀、支持力大、不易变形,因此多用于SUV、掀背式等尾门较重而且开启高度较高的车型。
电控撑杆的应用实现了尾门的自动开闭,提高了舒适性,但同时也带来了电动撑杆的速度控制、双撑杆的速度同步、自动开闭过程中遇到障碍物或者人员等可靠性、稳定性和安全性的问题。
文中提出的汽车电动尾门ECU系统利用采集到的霍尔传感器的反馈信号和撑杆电机的驱动电流,采用PID控制器实现了电动尾门开启和关闭的速度自适应。在外界环境变化、尾门质量变化、施加外力不同等各种情况下,保持双撑杆运动同步,尾门开启和时间不变,并且在整个开闭双向运动过程中实现防夹保护。
1 电动尾门ECU系统介绍
电动尾门ECU系统架构如图1所示,主要包括电源、开关、MCU、左撑杆电机、右撑杆电机、吸合执行器和尾门锁。
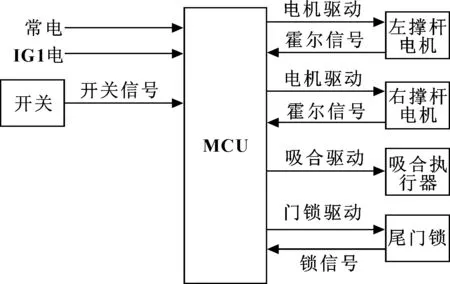
图1 汽车尾门ECU系统架构
电源用来给尾门ECU供电,不同的车型有不同的电源策略。开关用来启动和停止尾门的打开和关闭,根据车型的不同,开关的种类也不相同,包括尾门上的实体按键开关、来自中控屏的触摸开关、来自尾门下方的脚踢开关等,不同的开关与MCU的连接方式也不相同。MCU是尾门系统的主控制器芯片,所有的控制逻辑和算法都在主控芯片中实现和运行。左右撑杆电机是主要执行机构,用来驱动尾门门板的运动。吸合执行器主要用来在尾门半锁状态,吸合尾门,并进入全锁状态。尾门锁用来锁闭尾门,尾门锁电机包括双向电机、初始位置开关、半锁位置开关及全锁位置开关[2],尾门ECU系统需要根据尾门锁位置开关的状态,进行不同吸合、锁闭和解锁策略。
尾门ECU系统控制逻辑如图2所示。
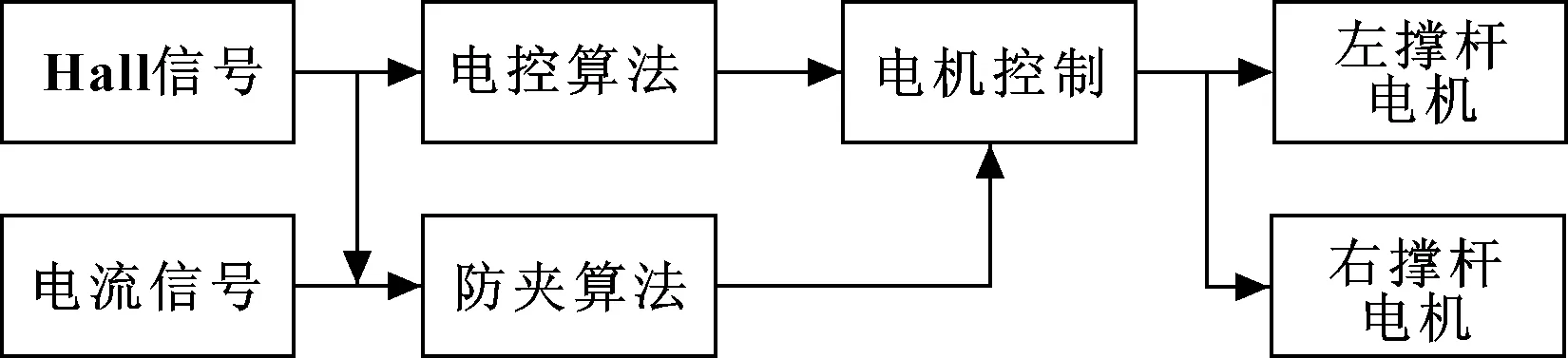
图2 汽车电动尾门系统控制逻辑
系统分别采集左撑杆和右撑杆电机的霍尔和电枢电流信号,作为电控算法和防夹算法的输入参数。电控算法的输出用来控制电机的启动、停止和运动速度。防夹算法的输出用来在尾门门板遇到障碍物时,并且阻力达到预先设定的阈值时,触发ECU系统防夹策略。
2 自适应速度系统设计
2.1 速度环设计
自适应速度环采用增量式PID控制器,实现在外界不同环境下的速度自适应。PID控制回路速度环如图3所示。
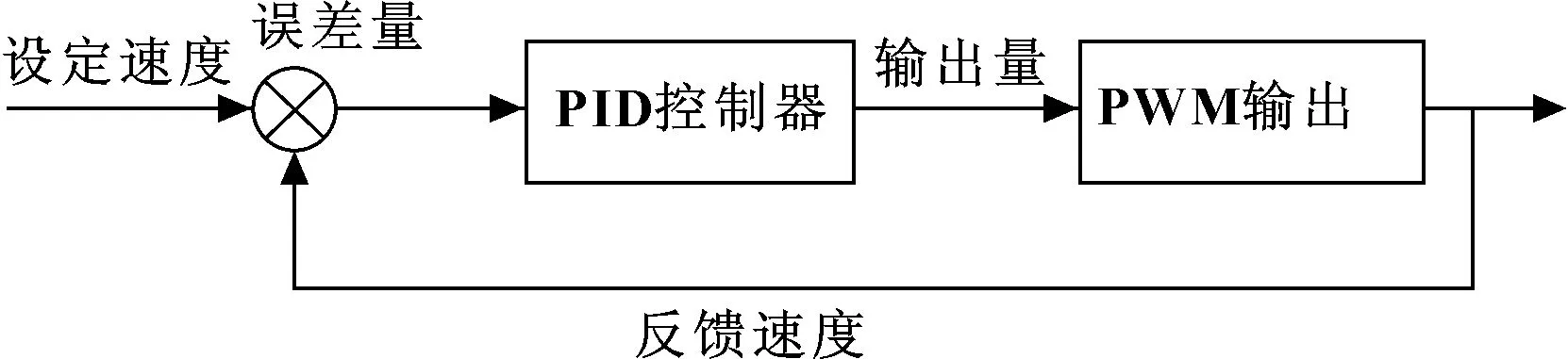
图3 速度环
误差量代表期望值与实际输出的误差,这个误差信号被送到控制器,控制器计算出误差信号的积分值和微分值,并将它们与原误差信号进行线性组合,得到输出量[3]。
增量式PID算法的输入为电机速度,电机速度由撑杆电机的霍尔编码器(AB相脉冲)反馈得到。根据实车测试,电动尾门整个行程的霍尔编码AB相计数值约为1 750,整个行程去掉开门解锁的时间大约需要4 s。设定PID的采样控制周期DOOR_SAMPLE_TIME为50 ms,电动运行过程为启动后电机匀速转动,那么目标速度即每个周期的位置增量DOOR_POS_D_TS大约为22。考虑到电动尾门左右撑杆完全相同且机械上高度对称,为保证撑杆的同步控制,使用左右撑杆的平均速度作为PID的输入,PID的输出同时输出给左右撑杆。
第k个周期的位置式PID离散表达式为
U(k)=Kperr(k)+Ki∑err(k)+Kd[err(k)-err(k-1)]
(1)
第k-1个周期的位置式PID离散表达式为
U(k-1)=Kperr(k-1)+Ki∑err(k-1)+Kd[err(k-1)-err(k-2)]
(2)
第k个周期与第k-1个周期的表达式相减,得到增量式PID离散表达式:
ΔU(k)=Kp[err(k)-err(k-1)]+Kierr(k)+Kd[err(k)-2err(k-1)+err(k-2)]
(3)
增量式PID控制器的结构体定义如下:
typedef struct
{
int32_t Kp; // 比例系数
int32_t Ki; // 积分系数
int32_t Kd; // 微分系数
int32_t Err_0; // 当前偏差
int32_t Err_1; // 上一次偏差
int32_t Err_2; // 上上次偏差
}PID_StructTypedef;
定义一个PID控制器结构体变量PID_StructTypedef PID,比例环节为V_P,积分环节为V_I,微分环节为V_D,PID结果为V_Delta,那么增量式PID的离散公式的实现为
V_P = PID.Kp*(PID.Err_0-PID.Err_1)
V_I = PID.Ki*PID.Err_0
V_D=PID.Kd*(PID.Err_0-2*PID.Err_1+ PID.Err_2)
V_Delta = V_P + V_I + V_D
以上为增量式PID算法的基本实现,电机的上一次输出值加上增量式PID的计算结果即为当前周期的输出值。
针对不同车系、不同撑杆型号造成的差异,调整PID参数和目标速度即可。
2.2 速度控制流程
控制流程如图4所示。
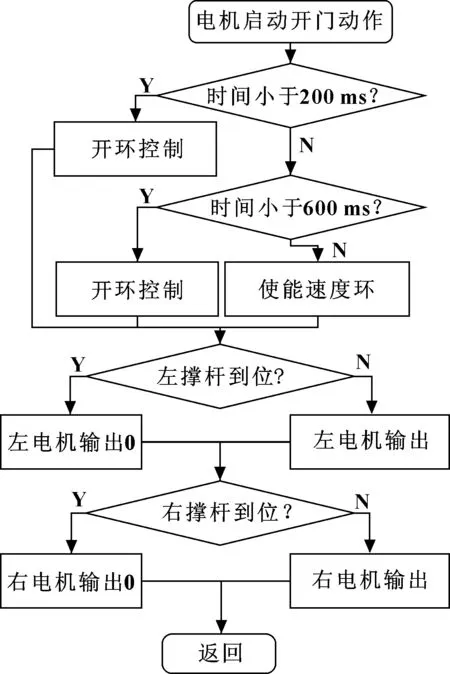
图4 速度控制流程
因撑杆电机存在安装的机械间隙,在开门的前200 ms作开环的启动以保证开门启动响应速度,在200~600 ms减小输出开环控制以保证开门动作平稳,600 ms后启动闭环控制。双电机分别输出控制,考虑到机械结构以及霍尔计数的偏差,左右撑杆到位分别停止。
3 防夹系统设计
3.1 防夹算法设计
电动尾门的撑杆电机为永磁直流电机。对于直流电机,转矩公式为
Tem=CTΦIa
式中:CT为转矩常数。
对于永磁直流电机,磁通Φ为定值。所以转矩和电枢电流成正比。
转矩平衡方程为
Tem=T2+T0
式中:T2为输出转矩;T0为空载转矩。
所以输出转矩与电枢电流的公式为
T2=Tem-T0=CTφIa-T0
电压平衡方程:
U=Ea+IaRa
电枢反电动势:
Ea=Ceφn
所以电枢电流为
Ia=(U-Ceφn)/Ra
当电机正常运转外界负载阻力增加时,系统的调节过程如图5所示。
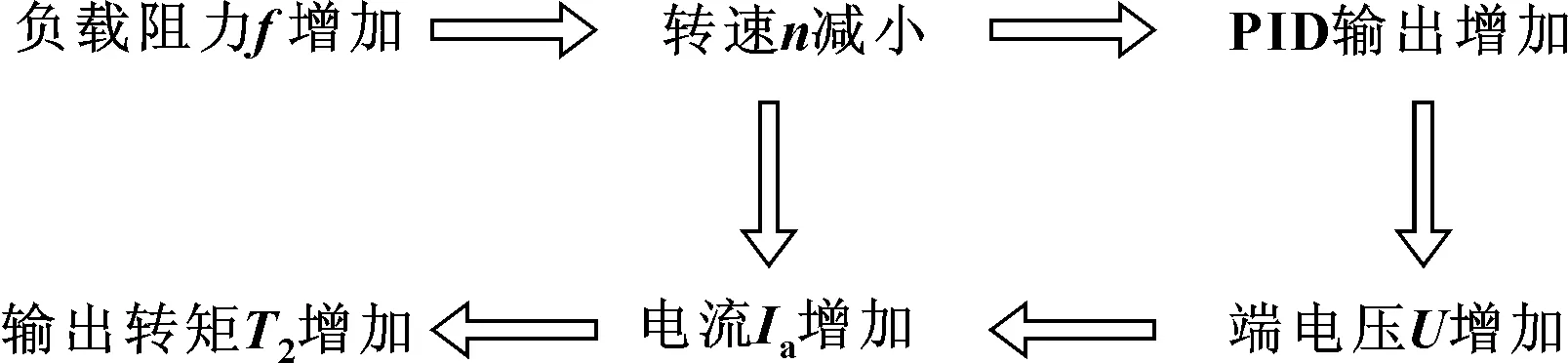
图5 系统调节过程
所以电枢电流的变化直接体现了负载合力的变化。当转速n减小即便端电压U不变,电流Ia会增加;在闭环调速过程中,外力作用导致的转速n减小将导致PID输出增加,从而使端电压U增加,电流Ia会进一步增加。因此在防夹算法中,主要以电枢电流作为计算输入。
由于电动尾门系统要求缓慢增加的负载阻力下电动尾门能正常电动开闭,不触发防夹功能,所以不直接使用电流的绝对值作防夹力的判据。当电动开关门过程中夹到或者撞到物体电机的力矩会快速增加,也就是电流的微分值较大;当电动开关门过程中因正常阻力变化造成电机的力矩变化较缓,电流的微分值比较小。所以使用电流的微分(即相邻周期的电流之差)作为防夹力判据。采集电流值ADC的值,并计算当前周期电流微分ADI_Sum_D0,前一个周期电流微分ADI_Sum_D1,前第二个周期电流微分ADI_Sum_D2。为减小误防夹概率,触发条件为连续3个电流微分都大于0(即电流连续3个周期增加,电机的力矩连续3个周期增加)的情况下,ADI_Sum_D0与ADI_Sum_D1之和大于对应的阈值。由于电动开门和电动关门的机械特性造成的偏差,开关门使用的防夹力判断阈值不同。
此外,针对一些特殊情况(如夹到体积较大的很软的物体),电流增加缓慢但会持续增加到很大,判断电流的绝对值超过对应的阈值,则触发防夹或者防撞。电动运行过程中增加对霍尔AB相脉宽的判断,当脉宽值超过正常阈值则触发防夹或者防撞。
针对不同车系、不同撑杆型号造成的差异,调整电流微分的阈值和电流的绝对值阈值即可调整防夹力大小。
3.2 防夹流程
防夹流程分为两部分,一是检测过载或者堵转等极端异常情况。在1 ms的处理周期可以使软件处理过载或者堵转等极端异常情况的响应实时性更高。二是防夹力的计算。防夹流程如图6所示。

图6 防夹流程
防夹算法主程序是每个防夹采样周期调用一次。过短的采样周期会导致电流微分值过小影响计算精度,容易造成误判或者漏判;过长的采样周期会导致防夹处理的实时性不够高影响安全。防夹算法主程序先判断两个霍尔位置偏差是否过大,如果偏差过大说明机械结构运动受到了不平衡的阻力且影响到了同步性,有安全隐患,防夹标志置位。如果位置偏差在正常范围内,判断电流防夹标志是否置位,如果已经置位则直接退出,如果没有置位则进行下一步计算。当电流微分连续3个周期都大于0说明电流在持续增长,需要进一步判断是否异常。由于在正常动作过程中,电流曲线也会有持续增长的区间,为了区别正常的增长与异常的增长,算法根据开、关门动作分别把电流微分值与开、关门动作对应的设置参数进行计算对比,超出设定参数则认为是异常并把电流防夹标志位置,否则直接退出。
4 试验验证
为了验证速度自适应系统,在不同尾门负载和供电电压下,记录了开关门过程的速度曲线。
如图7所示,9 V供电电压下有负载和无负载情况下的开关门速度曲线。如图8所示,12 V供电电压下有负载和无负载情况下的开关门速度曲线。

图7 供电电压下9 V速度曲线
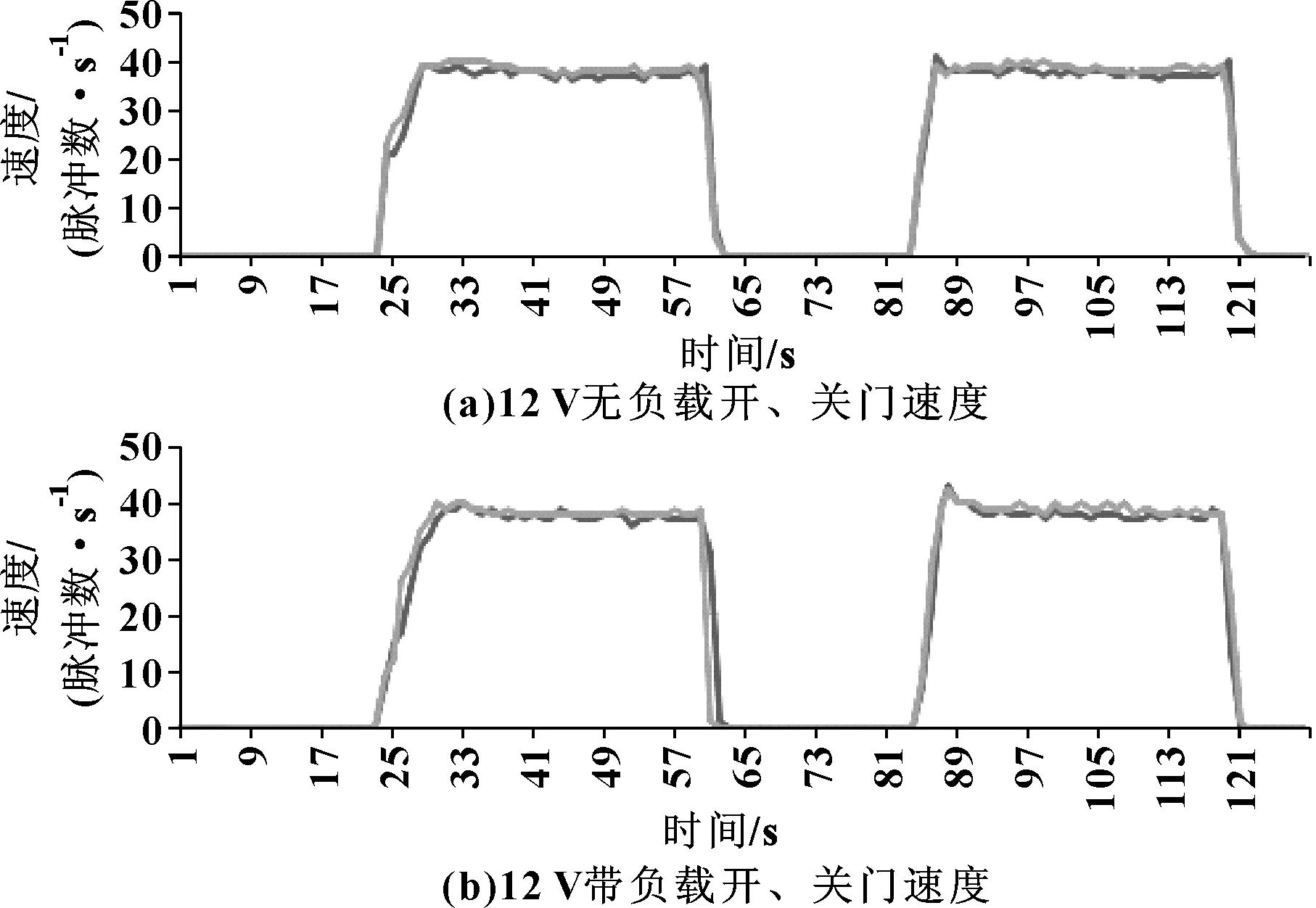
图8 供电电压12 V下速度曲线
图9是尾门运动过程中遇到障碍物触发防夹策略时的速度曲线,图10是电流和防夹力曲线。
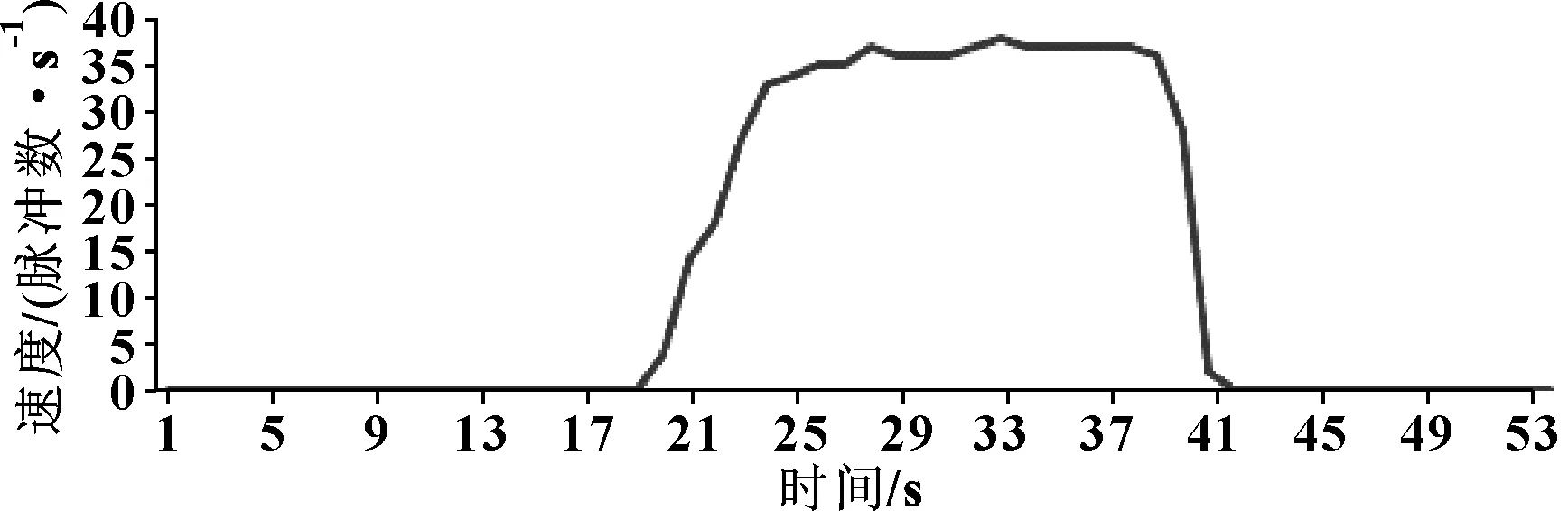
图9 防夹速度曲线
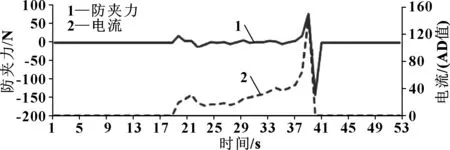
图10 防夹触发时防夹力和电流曲线
如图9和图10所示,尾门启动后,速度曲线稳定上升至匀速,电流总体上缓慢增加。40 s处人为施加阻力模拟门打开过程撞到物体,可见电流曲线快速上升,阻力也快速上升,防夹算法计算结果满足触发条件,主控程序启动防夹策略立即停止电机,开门速度曲线可见速度立即降至0。
5 结束语
基于速度自适应的汽车电动尾门撑杆电机控制技术,根据霍尔传感器的反馈信号和电机电枢电流的变化作为输入,通过PID控制器来调节电机控制信号的输出,同时实时监测障碍物的夹持力的变化。
试验结果表明,电动尾门电机控制算法会根据反馈速度实时调节输出,以控制开关门速度维持在目标速度,在不同负载不同电压的影响下,开关门速度和时间一致,而且在保持速度自适应的同时,防夹算法运行正常,解决了汽车尾门在不同的环境下开闭时间不同和夹伤人员的问题,提高了整个系统的稳定性和可靠性。
