智能家居场景中会话智能体主动交互设计研究
2020-09-01王尔卓李士岩
王尔卓,袁 翔,李士岩
智能家居场景中会话智能体主动交互设计研究
王尔卓1,袁 翔1,李士岩2
(1. 湖南大学设计与艺术学院,湖南 长沙 410000;2. 百度在线网络技术(北京)有限公司,北京 100089)
针对智能家居场景中会话智能体的主动交互设计策略,从决策权与沟通方式出发对主动性的特征进行讨论,并在此基础上构建4种主动风格(直率的建议者、直率的决策者、委婉的建议者、委婉的决策者)。通过“绿野仙踪”实验方法探究用户的性别、年龄、使用经验以及居住状态对主动风格偏好的影响,得出以下结果:①经验用户认为“建议者”风格比“决策者”风格更满意;家庭用户认为“建议者”风格比“决策者”风格更舒适;②“直率”的沟通方式在满意度和舒适度方面均优于“委婉”的沟通方式。实验验证了:①用户智能家居产品的使用经验及其居住状态会显著影响其对会话智能体主动风格的偏好;②智能家居场景下,会话智能体的沟通效率比礼貌更重要。
主动交互;人机交互;会话智能体;智能家居;用户属性
随着物联网技术与人工智能的发展。诸如亚马逊Alexa、小度音箱、天猫精灵等会话智能体产品(conversational agents)已进入人们的生活并被广泛应用于家庭中[1]。
LUGER和SELLEN[2]将会话智能体定义为一种语音对话系统,其嵌入在某项技术或设备中,具有多样化形象(如siri的动态图形或拟人形象的机器人),通过一些语言与非语言行为模拟人与人面对面的交流体验,并且不同于单纯的聊天机器人,会话智能体具有一些实质性的功能。
智能家居场景中,会话智能体产品常常以智能音箱为实体形象,其主要功能包括媒体播放、查询天气与新闻、订购商品等,可作为智能家居系统的一部分,用户通过语音的方式控制与其适配的其他智能家电设备(以亚马逊Alexa为例,用户可以通过呼叫Alexa开关卧室的灯、控制厨房水槽排放,开关客厅智能电视等其他设备等)。SCIUTO等[3]将亚马逊公司的这类智能家居系统模式统称为“以会话智能体为中心的家居生态系统”,是当前智能家居发展的重要趋势之一。
随着智能家居生态系统的不断完善,通过集成各种传感器、执行器以及大数据,会话智能体不仅能感知环境信息,响应用户指令,还具备了主动采取行动为用户服务的能力。已有研究指出,智能体的主动服务可以帮助有潜在需求的用户[4],并且人们无需向智能体发送明确的请求,从而减少其在整个过程中的投入[5]。还有研究利用会话智能体的主动行为作为一种技术干预,在强化学习[6]和健康管理[7]方面对用户进行引导。
但在不同的场景中,人们对智能体主动行为的态度并不相同。智能体的主动行为可能是一种便利,也可能是一种打扰。智能体的主动交互设计不仅要根据环境采取适应性策略,也必须关注用户的属性[8]。XIAO等[9]指出,用户对于智能体主动行为的主观喜好程度与用户的个体差异相关,因此“如何在提供主动帮助和不打扰用户之间找到平衡”是会话智能体广泛应用所面临的一个巨大挑战。
针对智能家居场景,本文从决策权与沟通方式2个维度出发对会话智能体的主动性概念进行讨论,通过定义“主动风格”来梳理智能体的主动行为特征与策略,通过绿野仙踪(Wizard of OZ)实验分析用户属性对主动风格偏好的影响,进而指导智能家居产品的主动交互设计。
1 人工智能体的主动性研究
RAFFERTY等[10]指出,“主动性”是人工智能体表现智能的重要属性之一。但在不同的应用场景下,智能体主动行为的具体目标不同,研究者对主动性概念的认知也不同。已有文献将其分为2类:
(1) 主要研究特定社交场景下智能体主动发起与人类沟通时应采用的具体方式和方法。如KATO等[11]为商场引导机器人制定了一种“低打扰度”的主动策略,即机器人在与行人沟通前,应通过身体朝向与注视等行为向行人展现自己的交流意图。GARRELL等[12]与ROUSSEAU等[13]讨论了当机器人在户外向行人请求帮助时,非语言行为(面部表情、头部转向、手势以及移动轨迹)的作用。其研究主要从人的社交行为细节中发掘智能体主动行为的设计灵感,并未对主动性概念进行结构化的讨论。
(2) 主要研究特定任务场景下人与智能体的协作问题。对主动行为的讨论主要围绕自治性(autonomy)这一概念,即与智能体(机器人)协作时人类需要介入的程度[14]。又如,BARAGLIA等[15]在人与机器人合作完成工作台物件操作任务时,基于自治水平的高低提出了3种主动模型。PENG等[16]从职业心理学中的主动性定义出发,在自治性概念的基础上又进一步结合了机器人对用户的预期,为商场购物助手机器人定义了高、中、低3个主动等级。
上述研究对于讨论智能体的主动行为具有一定指导意义,但这些研究所关注的场景主要是公共场所(商场、户外)和工作环境,并未针对智能家居场景下会话智能体与人的关系进行讨论。
2 家居场景下会话智能体主动性的关键特征
在智能家居场景下,会话智能体既是协助人们执行任务的工具,也是与人们交流对话的伙伴。DAUTENHAHN[17]认为,在智能家居场景中,智能体(机器人)的基本属性有:①效用,帮助用户完成特定的工作;②社交,以人类能接受的方式与其交互。基于此,在智能家居场景下讨论会话智能体的主动性,也需要回应2个基本问题:①会话智能体应如何主动帮助用户完成特定工作,即自动化与决策权的问题;②会话智能体应如何主动地发起与人的互动,即社交行为与沟通方式的问题。
(1) 自动化与决策权。在家居环境中,家庭自动化水平决定了智能体能在多大程度上收集、分析信息并主动对其他设备(如电器)实施控制。而在家庭自动化研究中,用户与系统之间决策权的分配是设计的重点[18]。PARASURAMAN等[19]指出,自动化水平反映了,机器在与人类合作收集、分析信息并做出决策与行动的过程中所占的比重。因此在智能家居场景下,决策权在人与智能体之间如何分配是反映会话智能体主动性水平的一个关键特征。
(2) 社交行为与沟通方式。由于具备语言和表情等拟人化沟通能力,智能体可能会被人们视为有生命的社会成员[20]。在人与人的交流过程中,沟通方式会影响人们对他人观点或建议的接受程度[21],而这种影响在人与智能体的交流活动中也同样存在。RAU等[22]与李辉等[23]的研究说明,当机器人采用直接或含蓄(explicit or implicit)的沟通方式时,人们对其建议的接受程度存在显著差异。在智能家居场景下,会话智能体的主动行为常常被作为一种技术干预来影响用户行为(如日程事项提醒[2])。因此,沟通方式是讨论智能家居场景下定义会话智能体主动性的另一个关键变量。
3 构建智能家居场景下会话智能体主动交互设计策略
3.1 智能家居会话智能体的4种主动风格
已知决策权与沟通方式是智能家居场景下定义会话智能体主动性的2个关键特征。从决策权的维度看,主动行为可分为“机器决策与人决策” 2种基本思路;从沟通方式的维度看,则可以将其分为“直接的与含蓄的” 2种基本方式。如果将 2组变量交叉组合,就得到会话智能体的4种基本主动交互策略,即主动风格:直率的决策者(straightforwarddecision maker,SDM)、委婉的决策者(reversed decision maker,RDM)、直率的建议者(straightforward adviser,SA)以及委婉的建议者(reversed adviser,RA),如图1所示。

图1 主动特征与主动风格
3.2 用户属性与主动风格偏好
不同用户对于智能体主动行为有不同态度,讨论特定用户属性与特定主动风格之间的相关性,对于智能家居场景下会话智能体的主动交互设计具有现实的指导意义。本文重点关注用户的属性,如:性别、年龄、智能家居产品使用经验和居住状态(表1)。

表1 相关用户属性
4 实 验
为了获取用户对智能体主动风格的偏好,本文采用了“绿野仙踪(The Wizard of OZ)”方法设计并组织了实验。实验模拟了2种家居场景:①被试在实验中执行家居场景下的日常活动任务;②在任务的进行中,会话智能体主动为用户执行常见的智能家居功能。
4.1 实验任务
本文根据BAKKER[27]在研究中提到的2种用户典型生活状态,设计了A和B 2项日常任务。其中,任务A要求被试挑战游戏手机“flappy bird”,并营造用户专注于单一任务的活动状态;任务B要求被试一边看电视一边做简单家务(将红、黑2色混在一起的豆子分装到不同的容器中),营造用户同时进行多项较为轻松的任务状态。
此外,基于3种典型的智能家居功能与服务(安全与安保、环境与照明、媒体播放)[28],分别构建了3种实验场景:①正在烧开水,智能体主动为被试关闭烧水壶;②环境光线较暗,智能体主动为被试打开台灯;③正在播放音乐,智能体主动控制音乐的播放。由于实验时间不宜过长,每名被试者只随机体验了3种功能中的2种,每种功能会话智能体均以4种不同主动风格按照随机顺序向用户发起交互,任务情况如图2所示。
4.2 被试者情况
参与实验的被试者共60人,年龄范围为18~52岁(均值27.8,方差10.28)。被试者均来自湖南省长沙市,详细信息见表2。将被试者随机分为2组,每组30人,分别执行A和B 2项实验任务。

图2 实验任务

表2 被试者属性
4.3 实验工具与实验设计
为了更好地模拟用户与会话智能体的互动场景,本文使用Arduino,Processing和3D打印技术开发了原型机(图3)。其包括舵机、显示屏、LED灯带和音箱等组件,能通过面部表情、转向动作和语音向被试表达意图。
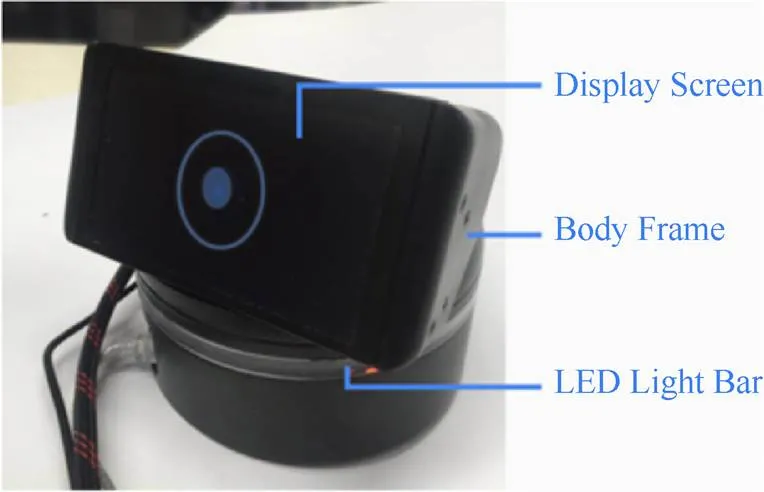
图3 会话智能体原型机
根据实验确定的3个场景,分别为每个场景定义了4种会话脚本(对应4种主动风格)。表3列出了在打开台灯场景中,原型机会话脚本的具体内容。所有脚本均使用百度AI开放平台自动将文字脚本转换为语音。在执行时,为了更好地引起用户的注意,原型机将同步做出表情、转向和闪烁等非语言辅助动作,且所有脚本的辅助动作均完全一致。
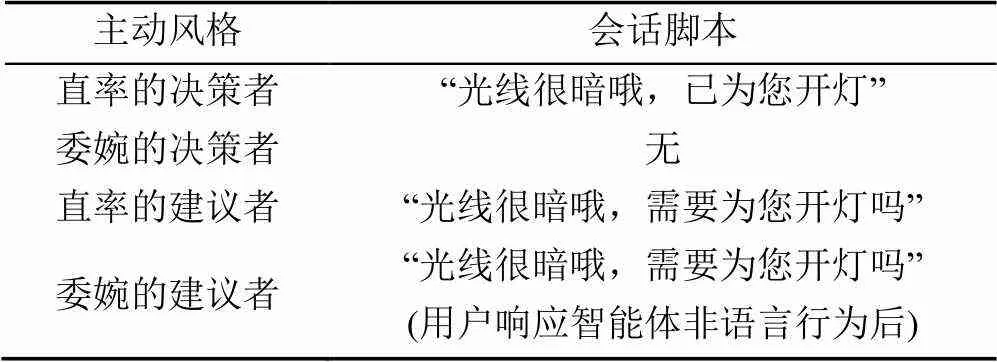
表3 会话脚本(以打开台灯为例)
实验采用“绿野仙踪(The Wizard of OZ)”的方法,每次实验共有2名实验人员和1名被试者参与,其中实验员1负责实验记录,实验员2在不引起被试注意的情况下根据会话脚本对原型机进行操控,被试者则在一个相对独立的空间内体验实验项目,如图4所示。

图4 实验场景布置
实验主要采用李克特五点量表对被试者的满意度与舒适度2项指标进行测量(分数范围从1~5分)。满意度与舒适度为评价智能家居产品设计的2个重要指标(满意的感觉是用户对产品产生偏好选择的重要原因[29];获得舒适感是用户使用智能家居的主要目的之一[30])。由于本次实验每名被试者需要连续体验多种会话脚本(且对应不同的主动风格),持续时间较长,考虑到过于复杂的量表可能会引起被试者疲劳,影响实验结果,因此未在量表中引入其他指标。
4.4 实验过程
实验开始前,首先向被试者介绍“主动”的概念、原型机功能以及实验步骤,以避免被试者在实验中感到困惑。实验开始后,被试者随机进入预先构建的功能情景(图5),根据桌上的任务器材保持相应的任务状态。被试者开始任务后,智能体根据会话脚本呈现不同的主动风格与被试互动。每体验一种会话脚本,被试者即被要求填写1次量表并进行打分,之后研究者对其进行深入访谈,了解其具体感受。

图5 实验场景
5 实验结果
研究者将每名被试者对于同一主动风格的2种不同功能的评分进行求和平均,以尽量消除功能类型的影响。
为了更好地探究数据背后的意义,研究者将数据分为3组进行组内对比分析:①SA与RA为“建议者风格”组,SDM与RDM为“决策者风格”组,探究二者的差异;②SA与RA进行对比分析,探究“决策者风格”下,沟通方式的差异;③SDM与RDM进行对比分析,探究“建议者风格”下,沟通方式的差异,见表4。

表4 数据分析分组情况
5.1 主动风格的整体评价
研究者分别对3组组内进行独立检验,结果如图6与表5所示。

图6 用户主动风格整体评价

表5 主动风格整体评价t检验
(*:<0.050)
被试者对于“建议者风格”与“决策者风格”,满意度与舒适度评分均无显著差异(满意度:(238)=1.007,=0.315;舒适度:(238)=0.680,=0.497)。
“建议者风格”下,被试对直接的沟通方式更满意、更舒适,且两者具有显著性差异(满意度:(118)=4.283,=0.000;舒适度:(118)=3.651,= 0.000)。
“决策者风格”下,被试对直接的沟通更满意、更舒适,且两者具有显著性差异(满意度:(118)=2.087,=0.039;舒适度:(118)=2.618,= 0.010)。
5.2 用户属性对主动风格评价的影响
为了探究不同的用户属性是否对于被试主动风格的评价存在影响,研究者使用双因素方差分析对每个因变量(满意度、舒适度)进行检验,用户属性为组间变量,主动风格(按a,b,c对照组划分)为组内变量,结果见表6。其中智能产品使用经验与决策权存在满意度上存在显著交互效应((1,238)= 5.925,=0.016);居住状态与决策权在舒适度上存在显著交互效应((1,238)=4.518,=0.035)。

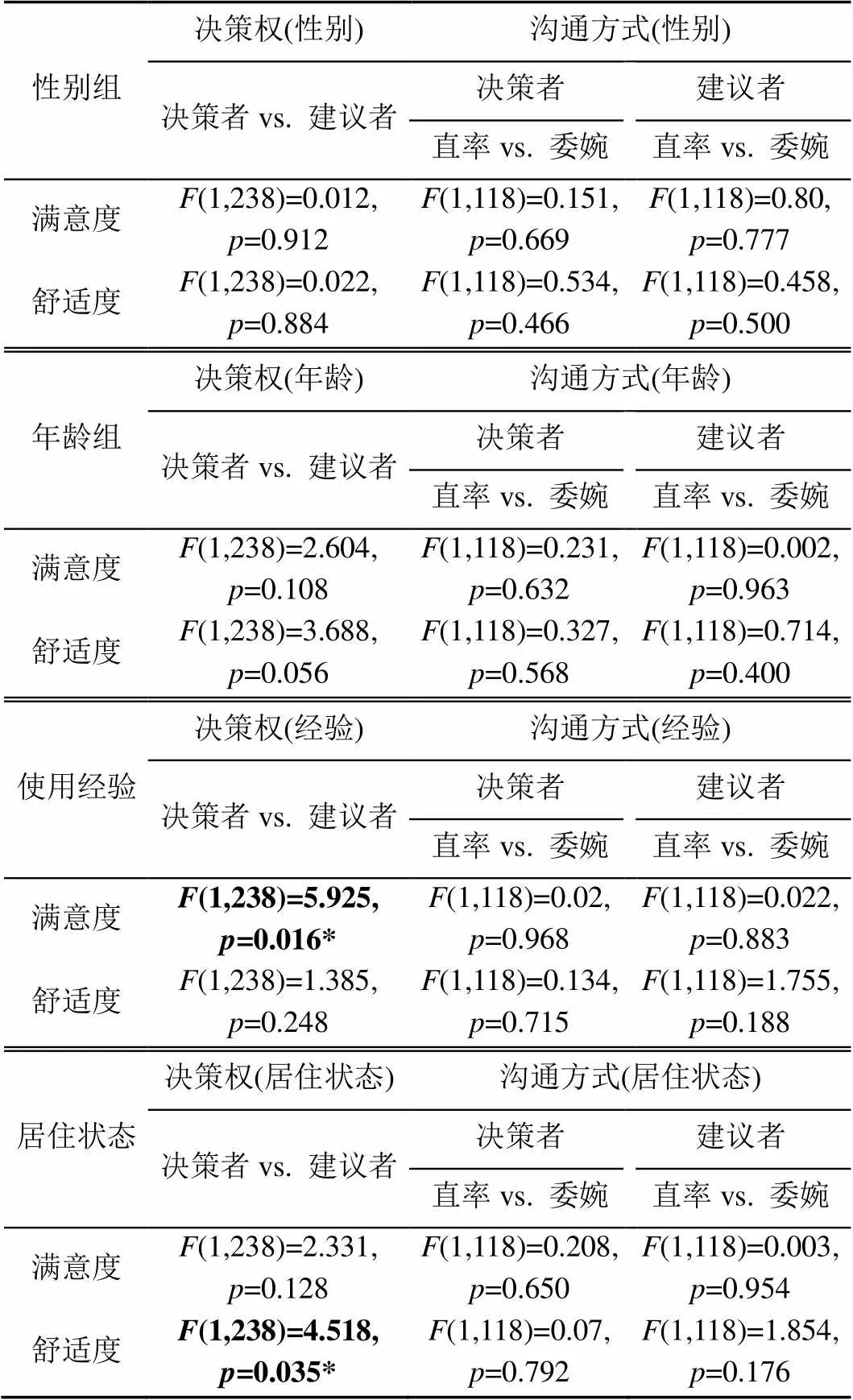
表6 用户属性与主动风格的双因素方差分析
(*:<0.050)

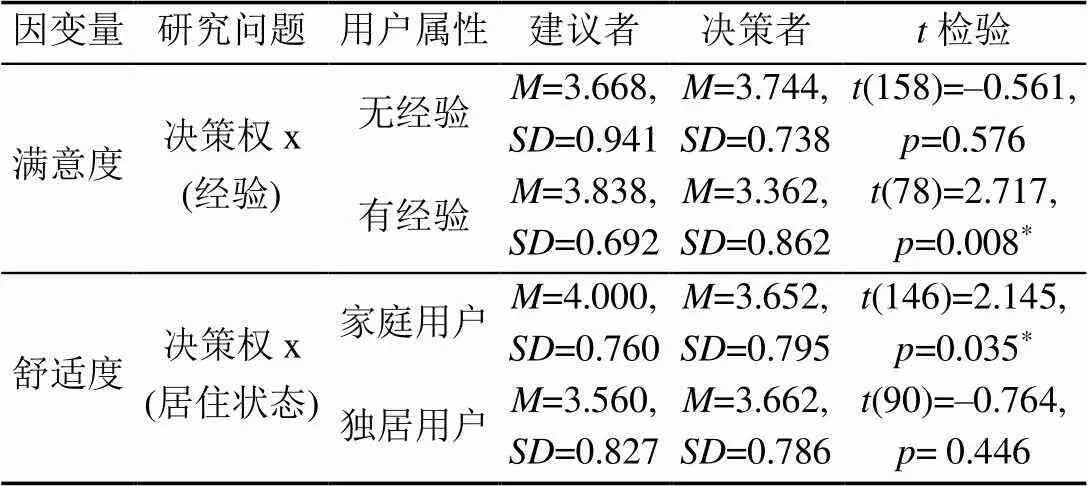
表7 不同属性用户对于“决策风格”评分差异t检验
(*:<0.050)
6 讨 论
从实验结果看,被试者对于会话智能体的4种主动风格是存在偏好的。总体上,被试者更偏向直接的沟通方式。其中,经验用户与家庭用户更偏向“直接的建议者”风格(被试偏好定位如图8所示)。研究者结合用户访谈,对观察到的结果进行了分析。
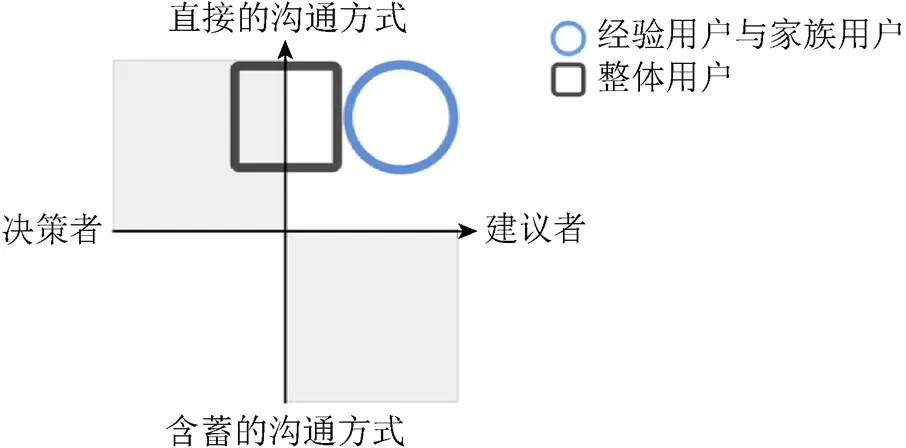
图8 用户属性与主动风格偏好
6.1 沟通方式的总体偏好
通过访谈发现,直接的沟通方式在满意度和舒适度上显著高于含蓄的沟通方式,其主要原因是“沟通效率”。如被试者明确指出,智能体采用直接的沟通方式时“自己不需要考虑太多,效率更高(31号被试者)”;而采用含蓄的沟通方式时,就“容易感到困惑(24号被试者)”。
需要说明的是,此结果与已有文献对公共场合下智能体主动行为的研究结果明显不同。文献[4,11]指出,公共场合中的社交服务机器人应采用“低打扰程度”的主动策略,过于直接的沟通行为反而会降低与人对接成功的几率。不同研究结果的差异说明,在不同的场合下人们有不同的社交标准,而这种不同也会转移到人与智能体的互动中。在公共空间中,人们的行为习惯更加正式,其关注智能体的行为是否足够礼貌,而在家中,人们习惯于更随意的交流方式,认为含蓄的沟通方式“太客气了,没必要,希望沟通更加高效一点(24号被试者)”。
6.2 使用经验与居住状态对主动风格偏好的影响
从实验结果来看,用户属性中的“智能产品使用经验”以及“居住状态”对主动风格偏好具有显著影响。使用经验方面,具有智能产品使用经验的被试者偏好“建议者风格”,因为其对智能体的能力有更丰富的要求。比如,部分没有使用经验的被试者主要关注智能体的“功能和效率”,认为“能自动执行……非常智能(39号被试)”。相比之下,有使用经验的被试还关注智能体的“社交和沟通”,因为智能体采取行动前询问自己的意见,“体现了体贴、温暖,让自己感到被尊重了(54号被试者)”。“建议者风格”之所以被青睐,正是因为在社交上反映出一种平等的关系,说明不同经验水平的用户对于“智能”的理解和需求是多维的。
居住状态方面,与家人一起居住的被试者偏好“建议者风格”,因为其对家庭场景下的家居事务有更加复杂的认识,认为智能体的决策行为应更加保守。比如,有被试者考虑到,智能体对于家居事务的某个处理可能“其他家庭成员喜好不同(46号被试者)”;而且,一家人住在一起,“很多场景比烧开水更复杂(42号被试者)”。其对智能体是否可做出让所有人满意的处理持更加谨慎的态度,因此希望由人作出最终决策。
7 结束语
本文从决策权与沟通方式2个维度出发,对智能家居场景下会话智能体的主动性特征以及4种主动风格进行了讨论。研究发现,在智能家居场景下,用户普遍更注重与智能体的“沟通效率”,因此整体上偏好直接的沟通方式。此外,经验用户和家庭用户都偏好“建议者风格”,但两者原因却有所不同。前者是希望能与智能体建立社交上的平等关系,而后者则是出于对家庭事务复杂性的考虑。以上发现对于构建智能家居产品的主动交互设计策略具有一定的指导意义。
由于时间与成本的限制,本文仍存在不足之处。比如,家居场景是复杂的,一些场景很难在实验环境中模拟,所以本文仅对少数几个适合实验的家居场景进行了讨论。其次,由于实验设计和被试工作量的原因,实验量表仅测量了舒适度和满意度2个指标,比较简单。此外,本文4种主动风格的定义主要基于决策权与沟通方式2个维度的2个变量水平。是否可以引入第3个维度,是否需要细分出更多的变量水平,都有待后续进一步研究。
[1] PURINGTON A, TAFT J G, SANNON S, et al. “alexa is my new BFF”: social roles, user satisfaction, and personification of the Amazon echo[C]//Proceedings of the 2017 CHI Conference Extended Abstracts on Human Factors in Computing Systems - CHI EA’17. New York: ACM Press, 2017: 2853-2859.
[2] LUGER E, SELLEN A. “Like having a really bad PA”: the gulf between user expectation and experience of conversational agents[C]//Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems. New York: ACM Press, 2016: 5286-5297.
[3] SCIUTO A, SAINI A, FORLIZZI J, et al. “Hey alexa, what's up?”: a mixed-methods studies of in-home conversational agent usage[C]//Proceedings of the 2018 on Designing Interactive Systems Conference 2018 – DIS’18. New York: ACM Press, 2018: 857-868.
[4] SATAKE S, KANDA T, GLAS D F, et al. How to approach humans?: strategies for social robots to initiate interaction[C]//Proceedings of the 4th ACM/IEEE international conference on Human robot interaction – HRI’09. New York: ACM Press, 2009: 109-116.
[5] RASHED M G. Observing people’s behaviors in public spaces for initiating proactive human-robot interaction by social robots[D]. Saitama: Saitama University, 2016
[6] KIM Y, BAYLOR A L, GROUP P. Pedagogical agents as learning companions: the role of agent competency and type of interaction[J]. Educational Technology Research and Development, 2006, 54(3): 223-243.
[7] BICKMORE T, MAUER D, CRESPO F, et al. Persuasion, task interruption and health regimen adherence[C]//Proceedings of the 2nd International Conference on Persuasive Technology. Heidelberg: Springer, 2007: 1-11.
[8] LIAO Q V, DAVIS M, GEYER W, et al. What can you do?: studying social-agent orientation and agent proactive interactions with an agent for employees[C]// Proceedings of the 2016 ACM Conference on Designing Interactive Systems. New York: ACM Press, 2016: 264-275.
[9] XIAO J, CATRAMBONE R, STASKO J. Be quiet? evaluating proactive and reactive user interface assistants[C]//Proceedings of INTERACT 2003. Heidelberg: Springer, 2003: 383-390.
[10] RAFFERTY L, IQBAL F, ALEEM S, et al. Intelligent multi-agent collaboration model for smart home IoT security[C]//2018 IEEE International Congress on Internet of Things (ICIOT). New York: IEEE Press, 2018: 65-71.
[11] KATO Y, KANDA T, ISHIGURO H. May I help you?: design of human-like polite approaching behavior[C]// Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction – HRI’15. New York: ACM Press, 2015: 35-42.
[12] GARRELL A, VILLAMIZAR M, MORENO-NOGUER F, et al. Proactive behavior of an autonomous mobile robot for human-assisted learning[C]//2013 IEEE RO-MAN. New York: IEEE Press, 2013: 107-113.
[13] ROUSSEAU V, FERLAND F, LÉTOURNEAU D, et al. Sorry to interrupt, but may I have your attention? preliminary design and evaluation of autonomous engagement in HRI[J]. Journal of Human-Robot Interaction, 2013, 2(3): 41-61.
[14] BEER J M, FISK A D, ROGERS W A. Toward a framework for levels of robot autonomy in human-robot interaction[J]. Journal of Human-Robot Interaction, 2014, 3(2): 74-99.
[15] BARAGLIA J, CAKMAK M, NAGAI Y, et al. Initiative in robot assistance during collaborative task execution[C]//2016 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI). New York: IEEE Press, 2016: 67-74.
[16] PENGZ, KWON Y, LU J, et al. Design and evaluation of service robot’s proactivity in decision-making support process[C]//Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems. New York: ACM Press, 2019: 98.
[17] DAUTENHAHN K. Socially intelligent robots: dimensions of human–robot interaction[J]. Philosophical Transactions of the Royal Society B: Biological Sciences, 2007, 362(1480): 679-704.
[18] MENNICKEN S, HUANG E M. Hacking the natural habitat: an in-the-wild study of smart homes, their development, and the people who live in them[C]// Lecture Notes in Computer Science. Heidelberg: Springer, 2012: 143-160.
[19] PARASURAMAN R, SHERIDAN T B, WICKENS C D. A model for types and levels of human interaction with automation[J]. IEEE Transactions on Systems, Man, and Cybernetics - Part A: Systems and Humans, 2000, 30(3): 286-297.
[20] DARLING K. “Who’s johnny?” anthropomorphic framing in human–robot interaction, integration, and policy[EB/OL]. [2019-11-22]. http://papers.ssrn.com/ sol3/papers.cfm?abstract_id=2588669.
[21] SANCHEZ-BURKS J, LEE F, CHOI I, et al. Conversing across cultures: east-west communication styles in work and nonwork contexts[J]. Journal of Personality and Social Psychology, 2003, 85(2): 363-372.
[22] RAU P L P, LI Y, LI D J. Effects of communication style and culture on ability to accept recommendations from robots[J]. Computers in Human Behavior, 2009, 25(2): 587-595.
[23] 李辉, 饶培伦, 陈翠玲, 等. 沟通语音与沟通风格对决策者接受建议的影响[J]. 科技导报, 2013, 31(26): 23-29. LI H, RAU P P, CHEN C, et al. Effects of communication voice and communication style on acceptance of recommendations[J]. Science & Technology Review, 2013, 31(26): 23-29 (in Chinese).
[24] VENKATESH V, MORRIS M G, DAVIS G B, et al. User acceptance of information technology: toward a unified view[J]. MIS Quarterly, 2003, 27(3): 425-478.
[25] CLARK M, NEWMAN M W, DUTTA P. Devices and data and agents, oh my[J]. Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, 2017, 1(3): 1-26.
[26] COSKUN A, KANER G, BOSTAN İ. Is smart home a necessity or a fantasy for the mainstream user? A study on users’ expectations of smart household appliances[J]. International Journal of Design, 2018, 12(1): 7-20.
[27] BAKKER S. Design for peripheral interaction[D]. Eindhoven: Eindhoven University of Technology, 2013.
[28] BRUSH A J B, LEE B, MAHAJAN R, et al. Home automation in the wild: challenges and opportunities[C]//Proceedings of the 2011 Annual Conference on Human Factors in Computing Systems – CHI’11. New York: ACM Press, 2011: 2115-2124.
[29] 洪政颉. 产品的操作对造形要素喜好影响之研究——以USB随身碟为例[D]. 台北: 大同大学, 2008. ONG Z J. Research on the influences of operating product on the preference for form factors: a case study of USB flash drive[D]. Taipei: Tatung University, 2008 (in Chinese).
[30] MENNICKEN S, VERMEULEN J, HUANG E M. From today’s augmented houses to tomorrow’s smart homes: new directions for home automation research[C]//Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing – UbiComp’14 Adjunct. New York: ACM Press, 2014: 105-115.
Proactive interaction design of conversational agent for smart homes
WANG Er-zhuo1, YUAN Xiang1, LI Shi-yan2
(1. School of Design, Hunan University, Changsha Hunan 410000, China; 2. Baidu Online Network Technology (Beijing) Co. Ltd, Beijing 100089, China)
Aimed at the proactive interaction design strategies of conversational agents (CAs) in the smart home, the proactivity was discussed in this article based on decision right and communication style. In this light, four proactive styles (straight forward decision-maker and adviser, euphemistic decision-maker and adviser) were designed for smart home CAs. A Wizard-of-OZ experiment was conducted to investigate the effects of users’ gender, age, experience and living status on their preferences for proactive styles. The results reveal that:① Users having had experience with smart home products are more satisfied with the “adviser” style; family users feel more comfortable with the “adviser” style. ② Users generally feel more satisfied and comfortable when the CA communicates with them in an explicit manner. And the experiment verifies that: ① Users’ prior experience with smart home products and their living states have an impact on users’ preferences for proactive styles of smart home CAs. ② In the smart home scenario, it is found that the communication efficiency of CAs is more important than politeness.
proactive interaction; human-computer interaction; conversational agents; smart homes; user characteristics
TB 472
10.11996/JG.j.2095-302X.2020040658
A
2095-302X(2020)04-0658-09
2020-02-09;
2020-03-17
17 March,2020
9 February,2020;
王尔卓(1992-),男,湖南株洲人,硕士研究生。主要研究方向为交互设计。E-mail:956834969@qq.com
WANG Er-zhuo (1992-), male, master student. His main research interests cover interaction design. E-mail:956834969@qq.com
袁 翔(1978-),男,湖南株洲人,副教授,博士。主要研究方向为信息与交互设计。E-mail:18975182468@qq.com
YUAN Xiang (1978-), male, associate professor, Ph.D. His main research interests cover information and interaction design. E-mail:18975182468@qq.com