矿山控制测量中虚拟参考站(VRS)技术的应用与改进
2020-09-01殷德耀白传飞董俞雪
殷德耀,白传飞,董俞雪
( 1. 河南省有色金属地质矿产局第三地质大队,河南 郑州 450016 ;2. 河南省有色金属矿产探测工程技术研究中心,河南 郑州 450016 )
0 引言
随着现代测绘技术和数字化技术的发展,“数字矿山”、“三维矿山”在地质找矿中发挥的作用越来越明显,近年来地质行业对矿山测绘的精度要求和效率要求也越来越高。
VRS(Virtual Reference Stations)技术是现阶段最新的GPS定位技术,是网络RTK技术的一种,其主要特点是精度高、定位快、成本低、覆盖范围广。VRS技术采用了最先进的多基站网络RTK算法模式,代表了继常规RTK技术之后新兴的定位技术发展方向[1-2]。随着VRS技术在国内各类工程建设项目中的普遍应用和移动通讯服务领域的不断扩大,其在矿山测量中的应用也越来越广泛。
1 VRS系统构成及工作原理
VRS技术(虚拟参考站技术)是现有网络RTK技术的代表。VRS系统集GPS、Internet、无线通讯和计算机网络管理技术于一身,是由若干个(3个以上)连续运行的GPS基准站和1个GPS网络控制中心构成的系统集成[3]。
1.1 VRS系统构成
VRS的系统构成由GPS固定基准站系统、数据传输系统、GPS网络控制中心系统、定位导航数据播发系统、用户应用系统等5个部分组成[4]。
1.2 VRS工作原理
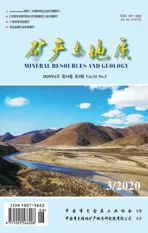
VRS技术是一个连续运行的GPS多参考站系统,参考站的个数至少为3个或3个以上,其工作原理见图1。
由图1可见,VRS系统中控制中心是整个系统的中心,它既是通讯控制中心,也是数据处理中心[5]。它通过通讯线(光缆、ISDN、电话线)与所有的固定参考站通讯,接受固定参考站发来的所有原始数据(Raw Data),也接受从流动站发来的概略坐标,然后根据用户位置,自动选择最佳的一组固定站数据,整体改正GPS轨道误差、电离层、对流层和大气折射引起的误差,将经过改正后的高精度的RTCM差分信号通过无线网络(GMS、CDMA、GPRS等)发送给用户,与移动用户通讯[6]。这个差分信号的效果相当于在移动站旁边,生成一个不存在的对应流动站概略位置的虚拟参考站,之后将该虚拟参考站的改正数据信息发送给用户所在的流动站,流动站综合自身的观测数据即解算出自己所在位置的精确坐标[7]。
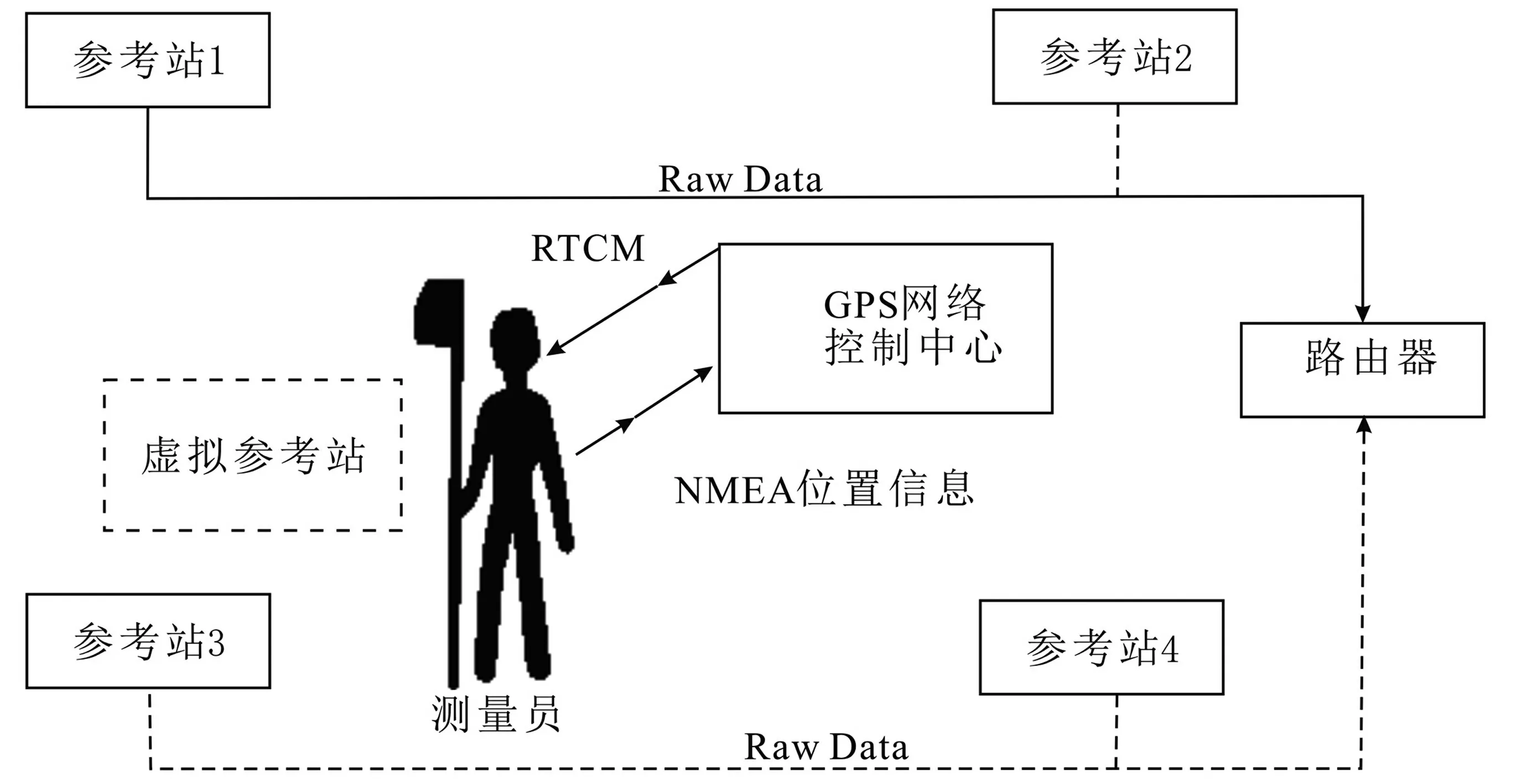
图1 VRS工作原理图
2 工作实例
2.1 工程概况
河南省内乡县雁岭石墨矿位于内乡县城板场乡,矿区属秦岭东延部分的伏牛山区,矿床大地构造上位于秦岭褶皱系的隆起区,山势陡峻,植被发育茂盛。该项目前期为河南省有色金属地质矿产局地质普查项目(ys2013-03),现为河南省财政地质勘查项目(豫自然资发〔2019〕22号)。
项目前期基础工作主要为矿区控制测量工作,工期紧,精度要求高。本次通过VRS技术布设矿区加密控制网,以满足工程测量和地形测图的需要。
2.2 工作流程简述
1)通过实地踏勘,确认收集到的已知控制点实地没有发生沉降和位移,可以作为检测点使用,同时检查使用的仪器设备是否经过检校,其精度指标是否达到规范要求。
2)在矿区范围内布设加密控制点(图根点),同时设置正确的工地参数。
3)对已知控制点全部进行重合检测(事前检查)。
4)采用VRS技术对部分矿区控制点(待求点)进行观测。
5)对部分矿区控制点进行复测(事中检查)。
6)完成所有的控制点观测。
7)对部分控制点边长进行边长检查(事后检查)。
8)提交最终成果。
工作流程详见图2。
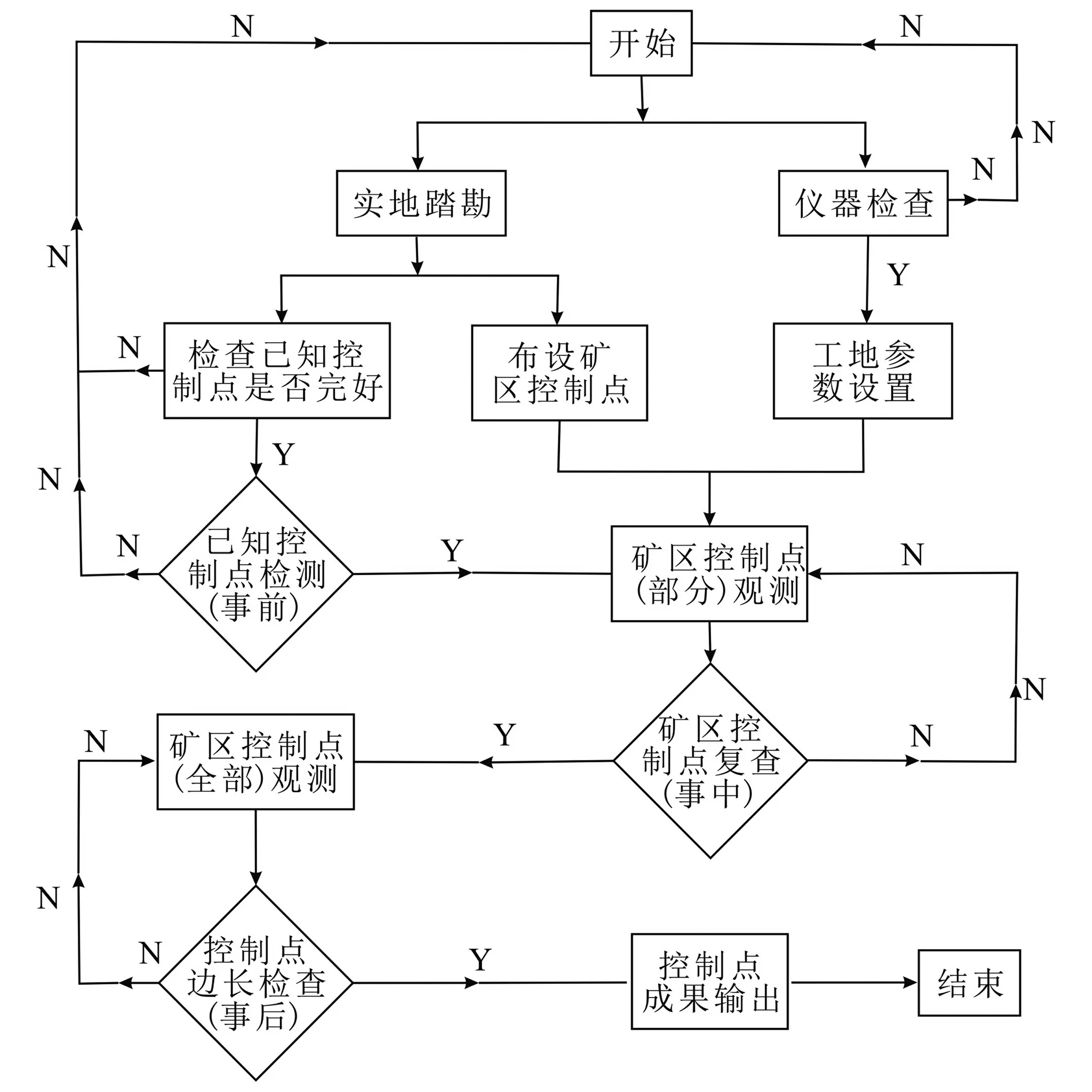
图2 VRS矿区控制测量工作流程图Fig.2 Flow chart of VRS control measurement in ther mining area
2.3 选点情况
矿区控制点的布设综合考虑后期发展的需要,一般选在山头、山梁或硬化道路上,并注意避开了高大茂密的林区、狭长的深沟、大功率高压电线、电塔、通讯设施、陡峭的悬崖和大面积水域(水库)等。最终通过埋石、刻石等手段共布设了T001……T048共计48个加密控制点,大部分控制点之间保持相互通视。具体布点情况详见图3。
图3 VRS控制点分布图Fig.3 Distribution map of VRS controlling points1—矿区范围线 2—已知控制点 3—已知控制点 4—图根控制点
2.4 已知控制点重合检测
将中海达GPS接收机通过对中、整平安置在已知控制点上,并量取天线高3次,取中数输入控制器中,经过仪器调试和测区参数配置,启动GPS-VRS系统,开启VRS测量模式后首先用GPRS或CDMA等无线上网方式联接参考站,联接成功后,RTK获得固定解且处于稳定状态时,连续观测3次,取其中数作为最终成果。
2.4.1 检测结果
本次对6个已知GPS控制点采用VRS技术实测其坐标和高程,并与已知点坐标数据进行统计对比,其结果详见表1。
2.4.2 精度评定
由于VRS测量的数据处理过程属于参考站和流动站之间的基准向量的解算过程,不存在网平差处理,因此其成果质量主要体现在载波相位的整周模糊度未知数解算是否得到固定解以及平面、高程的定位精度是否达到规范要求。
本次作业过程中均为固定解状态,根据表1中各测站的ΔX、ΔY,利用公式(1)可以求得每一点的点位误差ΔS:
(1)
式(1)中,ΔS为点位误差,ΔX、ΔY分别为纵轴、横轴方向上误差。
根据各点的点位误差和公式(2)可以计算出本次采用VRS技术进行重合点检测的点位中误差M检ΔS为±0.020 m。
(2)
式(2)中,M检ΔS为点位中误差,[ΔSΔS]为各点点位误差平方和,n为点数。
根据表1中各点ΔH和公式(3)可以计算出本次采用VRS技术进行重合点检测的高程中误差M检ΔH为±0.025 m。
(3)
式(3)中,[ΔHΔH]为各点高程较差平方和,n为点数。
2.4.3 误差统计
根据表1中的ΔX、ΔY,利用公式(1)可以求得各重合点的点位误差ΔS,并结合各测站的ΔH,按分布范围进行统计,详见表2。
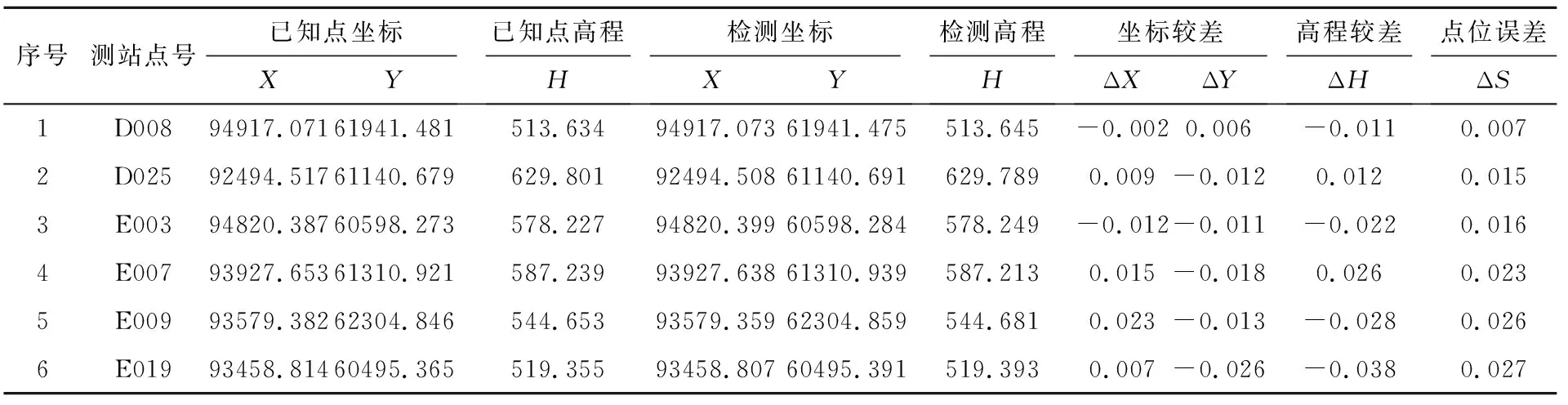
表1 已知控制点重合检测结果统计Table 1 Statistical table of coincidence detection results of known control points
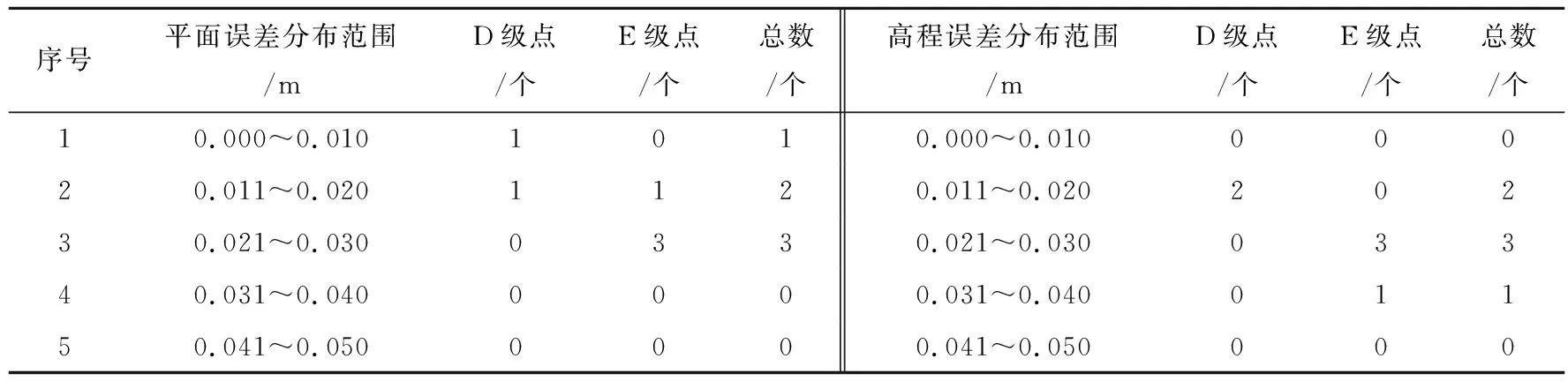
表2 已知控制点检测误差分布统计Table 2 Statistical table of detection error distribution of known control points
2.5 加密控制测量
GPS测量定位精度与卫星运行和空间分布有直接的关系[8],所以控制测量工作开始前对卫星星历进行了预估,选择适宜时间作业,可以达到更好的效果。本次采用了2000坐标系统,所以直接测量即可。
如前所述,安置整平仪器、联接参考站,待RTK获得稳定的固定解以后,对每一控制点采集不少于5 min的坐标数据3次,取中数作为最终成果。本次完成了T001……T048共计48个点的控制测量工作,其点位分布情况详见图3。
2.6 控制点复测及边长检查
为了更进一步分析和探讨本次VRS技术采集矿区控制点的可靠性,同时也为了保证成果质量,更好地服务于地质工程测量及后期地形测图工作,本次控制测量成果在使用前还要对部分控制点进行复测,即利用VRS技术在不同的时间段对部分控制点的坐标及高程进行复测。之后使用2″级以上全站仪对相互通视的控制点进行边长检查。
2.6.1 控制点复测
2.6.1.1 复测结果
本次对25个加密控制点进行了复测,并与前期采集完成的控制点数据进行统计、对比,其结果祥见表3。
2.6.1.2 精度评定
根据表3中各测站的ΔX、ΔY,利用公式(1)可以求得每一点的点位误差ΔS。
根据各点的ΔS,利用公式(2)可以计算出本次采用VRS技术进行控制点复测的点位中误差M复ΔS为±0.024 m。
根据各点前后两次测量的高程较差ΔH,利用公式(3)可以计算出本次采用VRS技术进行控制点复测的高程中误差M复ΔS为±0.030 m。
2.6.1.3 误差统计
根据表3中的ΔX、ΔY,利用式(1)可以求得各复测点的点位误差ΔS,并按其分布范围和高差分布范围进行了统计,详见表4。
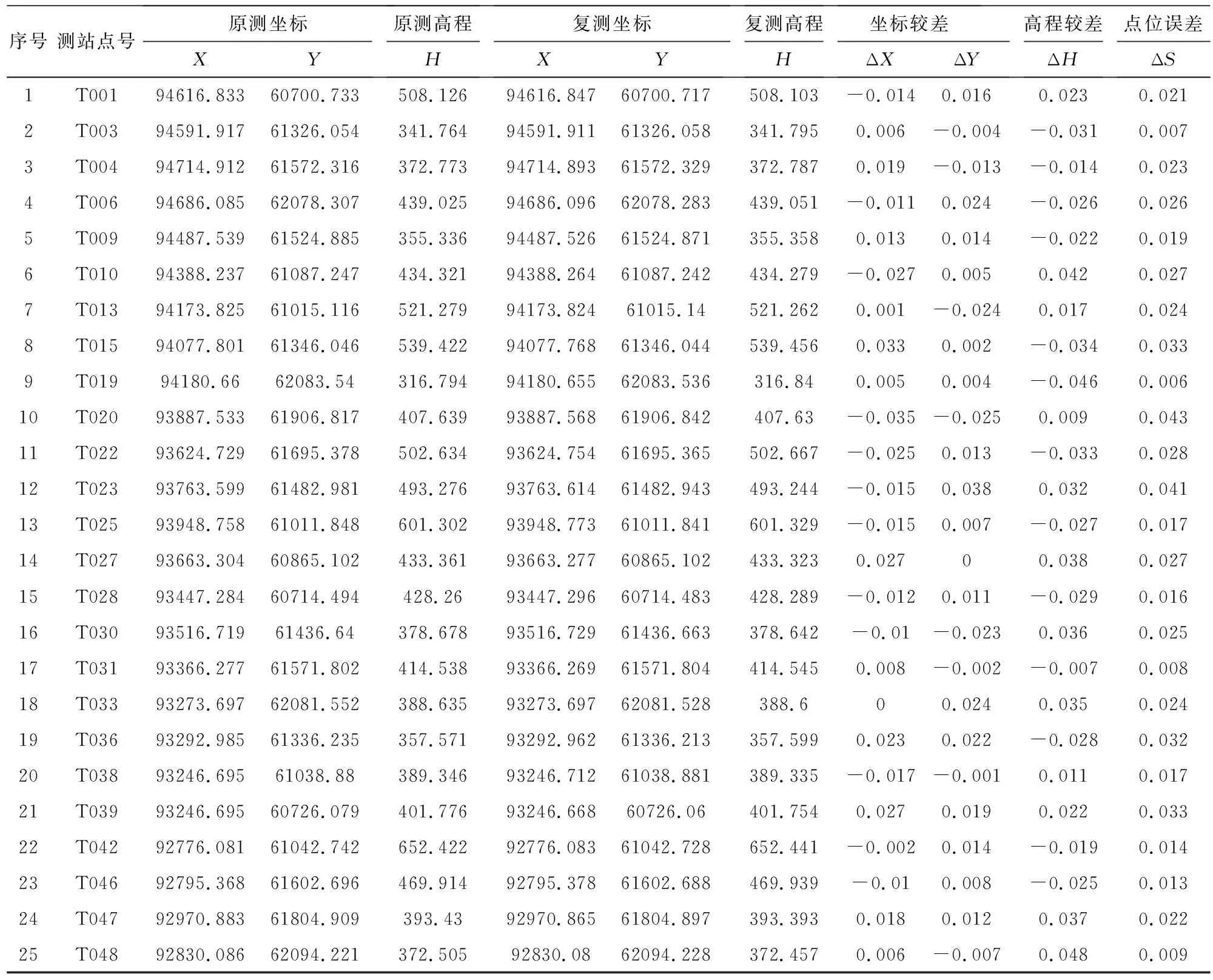
表3 VRS控制点复测结果统计Table 3 Statistical table of remeasured results of VRS control points
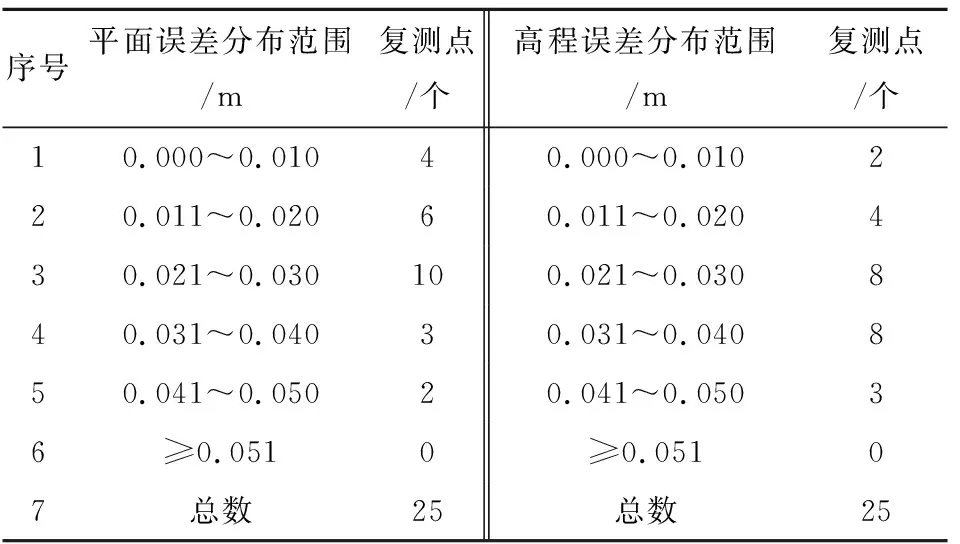
表4 VRS控制点复测误差分布统计Table 4 Statistical table of remeasured error distribution of VRS control points
2.6.2 边长检查
2.6.2.1 检查结果
本次使用检校后的2″级徕卡全站仪TC402对21对相互通识的控制点进行了边长检查,同时采用正倒法往返观测被检查的21对控制点之间的高差,并与前期利用VRS技术采集完成的这些控制点坐标进行统计、对比,其结果详见表5。
2.6.2.2 精度评定
根据表5中利用VRS技术获取的控制点坐标反算的边长与全站仪实测的边长之差ΔL,利用公式(4)可以求得本次边长检查的边长较差中误差M边ΔL为±0.024 m。
(4)
式(4)中,[ΔLΔL]为各边较差平方和,n为点数。
根据各条边上每一对控制点之间的高差与全站仪测定的高差之差ΔΔH,利用式(5)可以计算出本次采用VRS技术测定的高差与使用全站仪测定的高差较差中误差MΔΔH为±0.032m。
(5)
式(5)中,[ΔΔHΔΔH]为高差较差平方和,n为点数。
2.6.2.3 误差统计
根据表5中的ΔL、ΔH和各边的相对误差1/d,并按其分布范围进行了统计,详见表6。

表5 VRS控制点边长、高差检查结果统计Table 5 Statistical table of side length and height difference inspection results of VRS control points
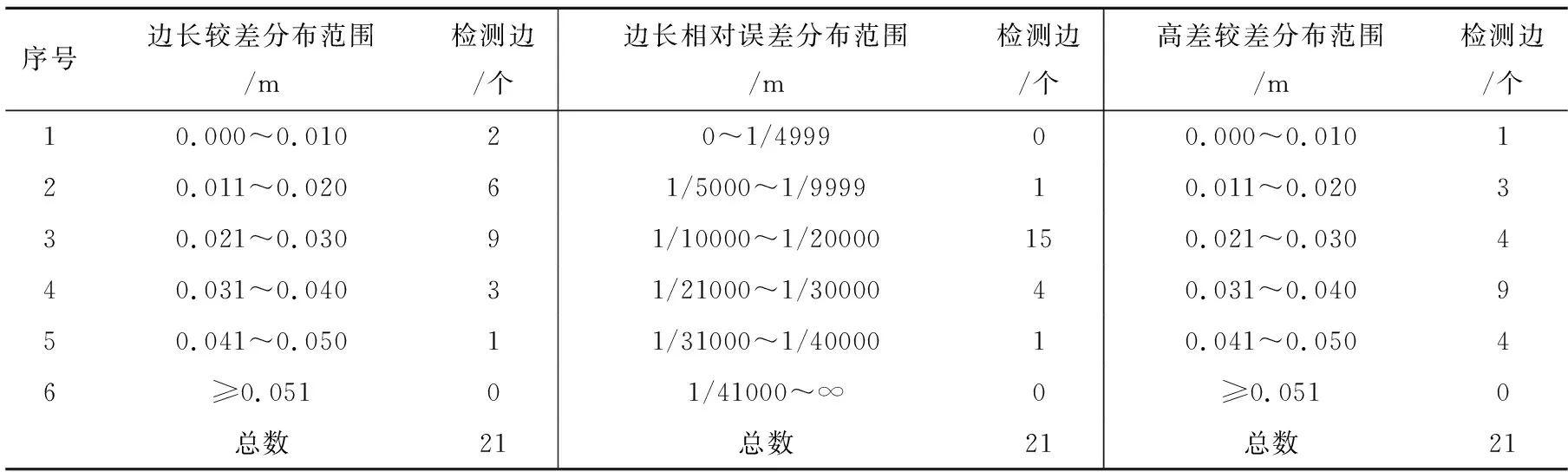
表6 VRS控制点边长、高差误差分布统计表Table 6 Statistical table of side length and height difference error distribution of VRS control points
2.7 精度分析
采用VRS技术所布设的控制网,不是严格意义上边与边联结的控制网,点与点之间不存在基线向量解算,所以一般认为,VRS的定位精度即为这种“点对式控制网”的精度。在本次已知控制点检测、复测和边长检测中点位中误差或边长中误差分别为±2 cm、±2.4 cm、±2.4 cm;高程(或高差)中误差分别为±2.5 cm、±3.2 cm、±3.4 cm,说明采用VRS技术获取的绝大多数控制点点位误差均在3 cm以内。其中,已知控制点检测共涉及6个点,占总数的100%,检测结果显示,纵横轴平面误差2 cm以内的占67%,3 cm以内的占100%,高程误差2 cm以内的占34%,3 cm以内的占84%;控制点复测共涉及25个点,占总数的52.1%,结果显示,纵横轴平面误差2 cm以内的占52%,3 cm以内的占88%,高程误差3 cm以内的占56%,4 cm以内的占88%;控制点边长检查共涉及21条边、42个点,占总点数的87.5%,结果显示,边长较差2 cm以内的占38.1%,3 cm以内的占81%,边长相对误差1/100 00至1/200 00的占72%以上,高程误差3 cm以内的占38.1%,4 cm以内的占81%。
通过上述分析,本次采用VRS技术开展矿山控制测量工作,平面精度约为2 cm、高程精度约为3 cm,满足一级GPS控制网的精度要求和矿山大比例地形测图(如1∶500)高程误差不低于基本等高距(0.5 m)1/10的精度要求,因此,约2 cm的定位精度和约3 cm的高程精度足以满足矿山控制测量的精度要求和矿山地质工作中如钻孔、钻井、探槽、探井、坑道以及勘探线测量等工作的需要。
2.8 技术方法改进
VRS技术与常规GPS-RTK测量一样,外部观测条件对其定位精度影响较大,其主要影响有气象、气压、温度、地形、卫星分布和人为操作等方面的影响,所以在本次控制测量中采用以下改进措施抵消或者减弱了外部条件的影响,提高了成果质量:
1)选择卫星分布状态最佳时开始观测。
2)保证控制点点位选在空旷开阔并远离电力、电信设施和大面积水域。
3)控制点观测时对仪器进行两次初始化,最终取加权平均值作为最终成果,提高了质量精度。
4)在布设控制网时,尽量保证点与点之间的距离大于200 m,避免短边产生较大的误差。
5)采用事前(控制点检测)、事中(控制点复测)、事后(边长检查)多次检测、检查的技术方法,保证了最终成果的质量。
通过上述技术改进,提高了测量精度,加快了工作速度,保证了最终成果的可靠性。由此可以设想,在未来的城市规划、市政建设、矿山建设、国土测绘、交通管理、以及环保、农业等所有野外勘测工作中,VRS技术将不断得到更广泛的应用。
3 结论
综上,VRS技术具有以下巨大优势:
1)测量精度高。采用VRS技术没有误差积累,精度均匀,其误差不会随着移动站与基准站距离的增加而增大。
2)可靠性强。VRS技术采用的是多参考站联合数据,在其系统网络控制范围内始终保持约2 cm的定位精度,可靠性更强。
3)工作效率高。VRS技术操作简便,不用架设基站,移动站作业员可以快速、实时地获取目标点三维坐标,内外业工作量小,节省了大量人力物力。
4)覆盖范围大。VRS厘米级模式下边长可达70 km以上,覆盖面积数千平方千米。
因此,在顾及气象、气压等外部环境影响的同时,对VRS技术方法加以改进,在矿山控制测量中采用VRS技术不仅切实可行,而且精度高、效率高、质量可靠。