小型无人机基于PhotoScan点云模型重建的露天矿土石方测量新方法
2020-09-01刘建坡
刘建坡,刘 勇
(1.河南省有色金属矿产探测工程技术研究中心,河南 郑州 450016;2.河南省有色金属地质矿产局第四地质大队,河南 郑州 450016)
0 引言
河南省是全国矿产资源大省,其中铝土矿位居全国第一,具有分布相对集中、埋藏浅、品位高、适于露天开采等特点。露天矿开采费用的很大一部分是由土石方量开挖清运产生的。露天矿开采的委托方和施工方由于采用的测量设备和计算方法不同,造成双方测量的土石方量存在差异,这就会造成双方的经济纠纷。所以探索采用先进的测量设备进行数据采集、采用准确严密的计算方法准确客观地计算土石方方量、避免土石方量的差异产生经济纠纷尤为重要[1]。土石方量常规经典外业施测多以水准测量方法、全站仪极坐标测量方法或者GNSS RTK方法[2],这需要投入大量人力和物力。在地形破碎、建筑密集、复杂地区,测量周期长,难度大,进而造成工作效率低、成本高[3]。进入21世纪,无人机的用途不断扩大,已成为一种新型的空中平台,在国民经济建设和现代战争中发挥着越来越重要的作用[4]。本文结合实际案例,采用小型低成本无人机对研究区进行航飞数据采集,使用AgiSoft PhotoScan对采集的航飞数据进行处理,以生成密级点云、正射影像图和三维模型,最后利用Global Mapper对生成的密级点云数据进行土石方量计算。
1 Phantom 4 RTK 航测无人机简介
Phantom 4 RTK由飞行器、云台相机、遥控器以及配套的DJITMGS RTK App组成,主要由飞控、通讯系统、定位系统、动力系统以及智能飞行电池组成。具备高精度测绘功能。机身预装机载D-RTKTM,可提供厘米级高精度精确定位,达到更加精准的测绘作业。飞行器搭载有位于机身两侧的红外感知系统及机身后部、前部和底部的视觉定位系统,实现多方位的视觉定位和障碍物感知。搭载有稳定拍摄2000万像素照片的云台相机。OCUSYNCTM高清图传整合于飞行器及遥控器内部,可提供高效稳定的高清图像传输。
2 Phantom 4 RTK 航测无人机功能
Phantom 4 RTK飞行器搭载有机载D-RTK,配合网络RTK服务或DJI D-RTK 2高精度GNSS移动站使用,可实现厘米级定位。同时支持原始卫星观测值及曝光事件数据记录,可用于动态后处理(PPK,post-processing kinematic)差分解算。
遥控器采用新一代OcuSync技术,配备5.5英寸高亮屏幕,内置DJI GS RTK App,可实时显示高清画面。用户根据实际需求在App中选择摄影测量或航点飞行的作业类型进行航线规划并执行作业。对于摄影测量,用户可在App中通过点击地图的方式规划摄影测量的作业区域,方便快捷。对于航点飞行,用户使用飞行器定点规划航线并设置航点动作后,飞行器可按照设置好飞行方案自动执行航飞作业。
3 项目实施与数据处理分析
3.1 研究区概况
研究选取某建筑石料用灰岩矿矿区进行实验验证,研究区中心纬度为32°43′07.04″E,经度为114°07′05.66″N。由于是采坑地形,开挖的比较破碎,地形起伏变化比较大,由于是正在施工的采坑,研究区基本没有植被,视野开阔,非常有利于无人机的飞行试验。
3.2 航飞作业流程
采用小型低成本无人机进行低空航测,主要技术流程见图1。
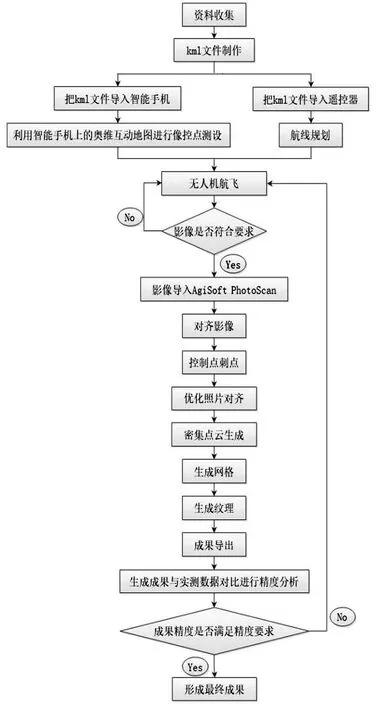
图1 技术路线流程图Fig.1 Technical route process chart
3.2.1 航测飞行准备
首先把研究区范围的CGCS2000坐标范围导入Trimble Business Center软件中以加载到Google Earth卫星影像图上,在Google Earth中添加设计的地面控制点(GCP)标记,创建多边形区域后保存为kml文件(图2)。
3.2.2 航线规划
在航测区域已经确定的情况下,可以在室内把航测区域范围导入Google Earth,DJI GS RTK App把创建的kml文件导入到遥控器中的DJI GS RTK App,用于规划作业区域并设置参数,App将根据导入的kml文件计算并生成最佳航线以实现测量作业的智能规划,将规划好的作业进行保存。
3.2.3 像控点的布设和施测
Phantom 4 RTK 本身自带有RTK模块,在航飞过程中,如果RTK模块工作,那么航摄所获得的影像位置精度可达厘米级,即可以达到和地面控制点同样的精度[5],实现与地面控制点同样的功能[6]。在这种情况下,即相对于把地面控制点引入到了空中。但是为了提高测绘的精度及检查RTK模块工作情况下航摄的精度,还需要在地面布设部分地面控制点以备校正和检核。在研究区范围空旷、视野开阔、平坦的区域布设13个地面控制点标志,其标志见图2,采用Trimble sps985 GNSS接收机,登录千寻北斗地基增强系统FIND CM进行地面控制点的数据采集,每个像控点分别独立采集2次,每次采集5个历元。

图2 研究区位置卫星影像图Fig.2 Satellite imagery map of the study area
3.2.4 航测数据采集
Phantom 4 RTK飞行器和遥控器分别开机进行连接,利用遥控器里安装的无线上网卡及SIM卡接入移动互联网,登录千寻地基增强系统FIND CM账号,在登录千寻账号时需要注意选择WGS84坐标系统还是CGCS2000坐标系统,WGS84对应的是8001端口,CGCS2000对应的是8002端口。在起飞前一定要确定是采用什么样的坐标系统,并且最好与采用GNSS RTK 采集的地面控制点坐标系统保持一致。飞行器接入千寻地基增强系统FIND CM。调用并执行规划完成后的作业,进行航向重叠80%和旁向重叠70%参数设置,设置飞行相对航高100 m,地面分辨率3cm,Phantom 4 RTK无人机开始按照事先规划好的航线进行飞行作业,并能够垂直起降智能飞行。1个架次标称空中飞行时间为30 min,但实际有效空中飞行时间1个架次约20 min。但Phantom 4 RTK无人机具有断点续飞功能,如果1个架次对研究区没有完成数据采集,在其返回更换飞行器电池后,还可以接着上个架次飞行的同一位置继续飞行作业。采集的无人机航飞照片能实时传到遥控器并自动记录到飞行器中的SD存储卡里,在作业完成后,飞行器将自动返航并降落。
3.3 航测数据处理
航测数据处理采用俄罗斯的一款AgiSoft PhotoScan软件,将Phantom 4 RTK无人机获取的航飞照片导入AgiSoft PhotoScan软件里,设置坐标系统为CGCS2000地理坐标系统和投影坐标系统,Phantom 4 RTK无人机获取的航飞照片已经加载了POS数据,无需单独导入POS数据,把采用GNSS RTK采集的地面控制点三维坐标数据也导入到AgiSoft PhotoScan里,设置坐标系统为CGCS2000地理坐标系统和投影坐标系统。由于本次研究区航飞照片和地面控制点采集都是采用的CGCS2000坐标系统,所以在AgiSoft PhotoScan参数设置里也都设置为CGCS2000坐标系统。
研究区位于38度带,在AgiSoft PhotoScan参数设置里设置成38度带高斯克吕格投影的CGCS2000投影坐标系统。本次研究区的POS数据和地面控制点数据都是采用网络RTK采集的,在AgiSoft PhotoScan里设置POS数据和地面控制点数据处理参数时dx和dy都设置成0.05 m。在把航摄照片和地面控制点数据导入AgiSoft PhotoScan后,首先进行快速检测,检查影像重叠率、相机焦距、单幅影像特征点匹配数量、地面控制点和影像地理配准等指标是否满足精度要求。经检验发现,影像质量和GCP质量良好,能够满足内业数据处理及正射影像制图规范[7]。然后进行对齐照片即空三的数据处理,在对齐照片后进行像控点的刺点工作,在刺点完成后进行照片的优化对齐,进行生成网格、利用运动恢复结构(SfM)算法和多视立体建模(MVS)生成密集点云[8]、生成纹理等数据处理流程。在数据处理完成后,可以导出数字正射影像图(图3)、数字高程模型(图4)、密集点云、三维模型等数据成果。
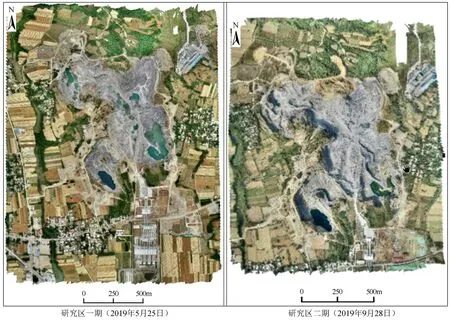
图3 研究区DOM成果Fig.3 DOM result of the research area
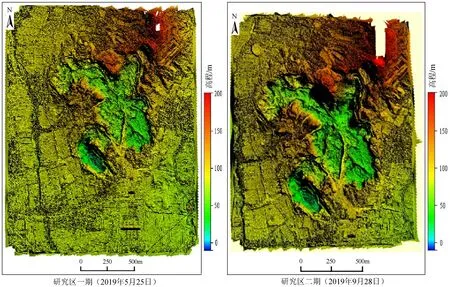
图4 研究区DEM成果Fig.4 DEM result of the research area
3.4 精度分析
通过对实地布设的多余地面控制点测量结果的比较,得知该实验区一期(2019年5月25日)的平面位置中误差为0.047 m,高程中误差为0.060 m;该实验区二期(2019年9月28日)的平面位置中误差为0.056 m,高程中误差为0.064 m;满足《1∶500 1∶1000 1∶2000 地形图航空摄影测量内业规范》(GB/T 7930-2008)(以下简称规范)要求的平地、丘陵地地物点平面位置中误差不大于图上0.6 mm的精度要求,满足规范要求的1∶500比例尺平地地形要求的0.2 m规定。检查结果(表1、表2)表明,Phantom 4 RTK无人机测绘能够满足规范地形测量精度要求[9]。
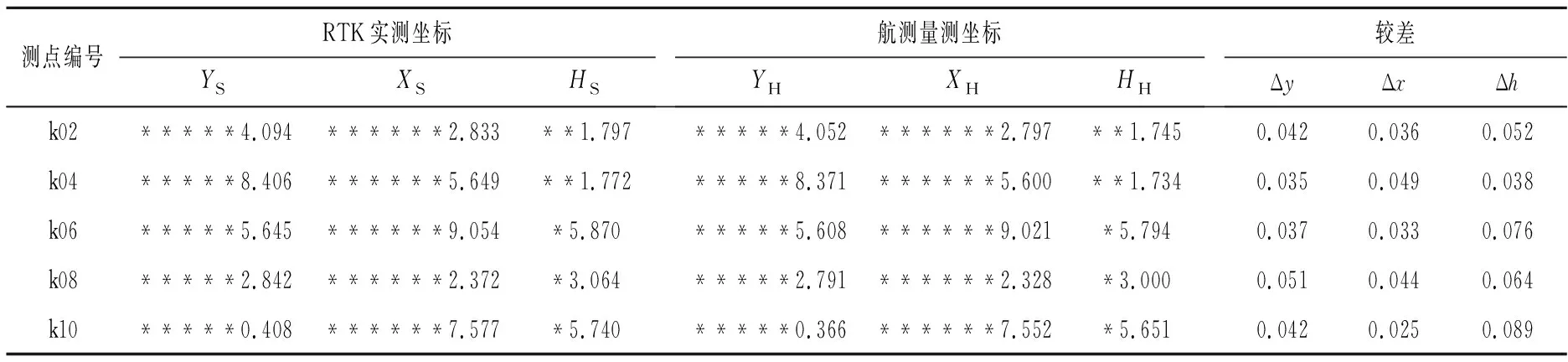
表2 GNSS RTK实测坐标与无人机航测量测坐标结果比较表(二期2019年9月28日)Table 2 Comparison table of GNSS RTK actual coordinates and UAV aerial survey coordinates (Phase Ⅱ September 28, 2019)
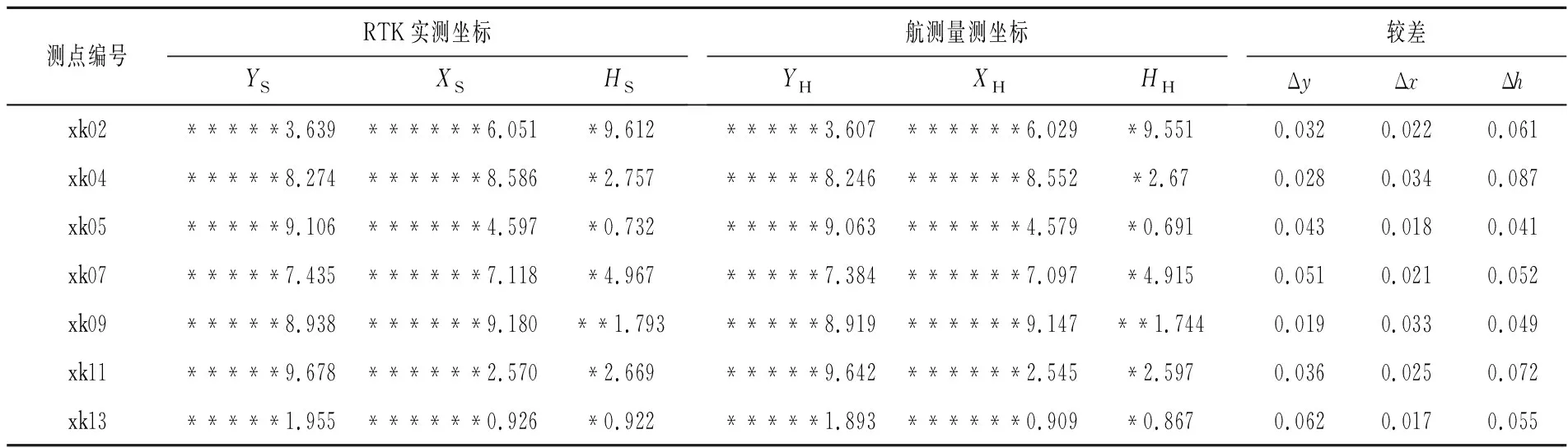
表1 GNSS RTK实测坐标与无人机航测量测坐标结果比较表(一期2019年5月25日)Table 1 Comparison table of GNSS RTK actual coordinates and UAV aerial survey coordinates (Phase ⅠMay 25,2019)
4 土石方量计算
4.1 计算模型的选择
土石方计算的方法主要有断面法、等高线法、方格网法、不规则三角网法(TIN)等。
断面法可根据截面的方向分为垂直截面法与水平截面法,是根据测量用途沿某一平直的方向依据地形变化采集垂直于该方向的断面数据,断面间土石方量是由断面间距和断面平均截面积确定的,并据此计算总土石方量。
等高线法是利用封闭的等高线计算土石方量。从设计的等高线开始,计算出相邻两条等高线围成面积的平均值乘以相邻等高线之间的高差,这样就得到两条封闭等高线之间形成的土石方量,依次类推计算整个测区的总土石方量。等高线法的前提是所有等高线必须闭合,并且不能准确计算出最后一条等高线以外的土石方量,这也是该方法在使用过程中的弊端所在。该法在精度要求不高、计算挖方进行概算、地下起伏较大时才考虑采用。
根据格网的形状不同,方格网法又分为三棱柱体积法和四棱柱体积法。方格网法计算土方首先应根据精度要求确定格网间距的大小,随后在格网的角点处测定坐标和高程,最后对每一格网取4个角点的高程平均值计算土方。计算结果同格网间距大小的选择关系非常大,随着格网间距无限趋近于0,方格网法的计算结果也无限逼近于三角网法的计算结果。
不规则三角网法(triangulated irregular network,TIN)是将地表近似地模拟成一组互不重叠的三角网,每个三角形的顶点用(x、y、z)表示根据三角形顶点距离的不断减小,这些非常小的三角形组成的三角网就会非常逼近真实的地表。每个三角形都存在一定倾斜角度。用不规则三角网法计算土方的原理是通过建立三角网计算每一个三棱锥柱的填挖方量,然后把每个三棱锥的方量累加,以计算出指定范围内的填方和挖方方量[10]。与断面法和格网法相比,三角网法对土石方量计算的精度与效率明显要优于格网法和断面法。三角网法是当前土石方量计算中最常用的方法,随着三角形顶点间距的减小,三角网法能很好地反映计算区域的地貌特征。三角网法依据每个三角形顶点填挖高度的不同,又将每个参与计算的三角形区域分为两种情况:全填全挖或有填有挖。
全填全挖时,体积计算公式(1):
(1)
式中:V为体积,S为三角形投影至参考计算面的面积;H1、H2、H3分别为三角形各角点的填挖高差。
有填有挖时,计算面将三角形分成两部分,一个是底面在计算面上的三角形的锥体,另一个是底面为四边形的楔体。此种情况下,锥体部分的体积计算公式(2):
(2)
式中:V锥为锥体部分的体积;S为三角形投影至参考计算面的面积;H1、H2、H3分别为三角形各角点的填挖高差。
楔体部分的体积计算公式(3):
H3+H1+H2)
(3)
式中:V楔为楔体部分的体积;S为三角形投影至参考计算面的面积;H1、H2、H3分别为三角形各角点的填挖高差。
本文利用TIN进行土石方量计算。
4.2 土石方量计算
利用构建的高精度TIN模型进行研究区土石方量的精确计算及精度评价[11]。依次把航飞数据经AgiSoft PhotoScan处理过生成的原始地貌点云las文件、经过施工开挖后形成的现势地貌点云las文件及需要对开挖的土石方量进行计算的边界范围DXF文件分别导入Global Mapper 20中,选取测量计算的区域图元,执行分析根据两个表面测量体积,软件便自动计算出两期间总共开挖的土石方量。该研究区按委托方要求两次航测期间(2019年5月25日至2019年9月28日)共开挖的土石方量为2 467 007.40 m3,回填的土石方量为327 325.42 m3,该建筑石料用灰岩矿总共运出的土石方量为2 139 681.98 m3。
5 优势分析
该研究区航飞数据经AgiSoft PhotoScan处理后生成的密级点云平均点距为3 cm,这对于采用GNSS和全站仪测量采集有限的数据是难以想象和无法做到的。基于这些密集点云生成的三维立体模型,基本上能够反映研究区真实的地貌起伏状态,如果生成的密级点云绝对精度继续提高的话,依据这些密集点云生成的三维立体模型将无限接近真实地形。无人机航飞照片能完整记录研究区的地貌破碎形态,而传统测量方法采集的有限个散点无法完整真实地表述地表的真实地貌地形起伏状态。随着航测无人机技术和无人机航测数据后处理软件技术的不断提高,其采集生成的密集点云数据精度也将不断提高,这样通过航测无人机对露天采坑进行的土石方测量结果和真实的露天采坑理论开挖的土石方量误差将会很小,两者的结果将会无限接近。
6 结语
本文介绍了借助于小型低成本无人机航测进行露天矿土石方量测量计算的流程、方法及可行性。与传统测量方法相比,不仅提高了露天矿土石方量的精确度,更提高了工作效率。采用传统测量方法进行露天矿数据采集,不仅费时而且测点稀疏有限,距离重建露天矿的真实地形地貌还有较大差距。通过具体实例比对表明,该方法不仅快速且精度高,其采集的数据是实景再现,能无限接近真实地形地貌。但本方法也有不足之处,在遇到露天矿由于开采不规范形成的陡崖、切割剧烈的地形、凹凸剧烈的地形,存在有数据失真现象,这种情况就需要借助免棱镜全站仪、三维激光扫描仪帮助解决。