低空摄影技术在矿山地质灾害应急测绘中的应用研究
2020-09-01洪剑武
洪剑武
(福建省地质测绘院,福建 福州 350000)
随着社会的发展,地球的变迁与人类社会的进步使地球的地表发生了不同程度的形变。对这些变化信息进行及时、精确、迅速的检测,有利于土地资源的合理开发、保护管理以及地球信息数据库的更新优化。同时这种实时的精测能力也是一个国家领土安全、科技实力和经济能力的集中表现[1]。自“数字地球”的概念出现以后,“数字地球”以一种极快的速度发展为世界各国地理信息学科的研究热点。中国占有960多万平方公里的国土,幅员辽阔,地形地势极为复杂,所以精确掌握国土资源的数目、分布范围、种类,及时了解国内领土资源的实时变动,为国土资源的科学管理、合理开发提供了关键性的技术支持。摄影测量作为现代获取和分析地理信息的重要方法,是推动“数字地球”乃至“数字城市”的关键环节。尤其是在地域广阔、地形极为复杂的地区,摄影技术在地形地质条件的测绘过程中发挥了重要作用。
1 基于低空摄影技术的矿山地质灾害应急测绘
在矿山地质灾害应急测绘工作中,无人机摄影测量技术的使用可以在第一时间内获取到灾区的影像数据。传统航测系统即使可以较为清楚的截取到灾区的高清影像,然而其拍摄的二维平面图在很大程度上却没有办法全面、客观的获取到空间地理信息,为应急测绘工作带来大范围的视野盲区与地域障碍[2]。但无人机低空摄影测绘在矿山地质灾害应急测绘中的使用,可以有效弥补了传统航测方法的缺陷,大大突破了二维影像的局限,利用低空搭载下多角度相机的拍摄有效实现了对灾区信息的垂直、平行、倾斜等多个角度的拍摄工作,从而获取到全方位、立体化的灾区地物信息数据,从而为矿山地质灾害的应急测绘工作提供了技术上的支持,有关无人机低空拍摄的方法如下图所示。
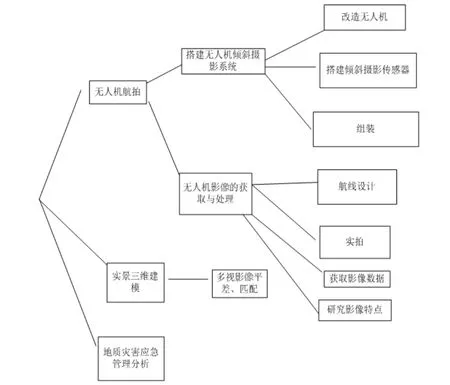
图1 矿山地质灾害测绘中无人机低空航拍方法示意图
1.1 组装无人机倾斜相机
无人机倾斜相机主要是利用了六拼相机的运作原理,利用设计图纸开模,制作出可以稳定安全悬挂在无人机进行航拍工作的相机支架,之后根据45°角将六个相机一一安装在相机支架上,其中5台相机的拍摄焦距设定为39mm的α7000相机根据事先规定好的45°角倾斜固定在相机支架,最后一台相机的焦距设定为26mm的α7000相机根据正射角度固定在相机支架的首端,最后利用单片机完成对六台拍摄相机的同步控制[3]。
1.2 航线设计
航线在设计时必须考虑到相机焦距大小、影像分辨率、图像重叠的影响,为了获取到灾区地物影像资料,选择焦距相对来说比较短的镜头,按照地面分辨率以及焦距大小和航高距离之间的关系,相机设定24mm焦距。借助计算获得航高,航高的计算必须以倾斜方向的镜头为根据,绝对航高H绝的计算是在航高H摄和测区基面h平均的基础上完成的,计算公式如下所示:

其中,f代表焦距,m代表比例尺航母。

其中,h最高代表最高物体的平均值,h最低代表最低物体的平均值。

由于灾区高程差异比较大,考虑到灾区高程对影像精确度的影响,因此,H绝的计算就必不可少了。
1.3 获取影像数据
利用旋翼无人机的低空拍摄系统以及固定机翼无人机的正射角航拍系统的统一曝光,第一时间内获取到灾区全面客观的影像资料,根据点、线、面三位一体的方案,实现灾区地物信息数据的实时截取。
1.4 无线传输
借助无线路由器充当网关,有效实现地面电脑和无人机搭载笔记本的网络连接,搭载笔记本普遍是以小型拇指电脑为主,所以能够利用远程控制实现低空航拍和地物信息的采集。
无线路由器作为整个局域网的核心,纳入有效的无线接入点,从而使装有网卡的计算机设备可以及时将信息传输至局域网。网关又称之为连接器,是一种在网络链路内实现无线局域网互关的储存设备,能够直接将两个局域网连接,使当地通信固定在本网络内。
1.5 实验影像数据后期处理
为了证明系统的安全性和实用性,有必要对获取数据进行后期处理,实现影像多幅拼接,以观其效。利用影像间同名数据点的匹配以及空中航拍区域的监测能够获得测区第一时间密集点云。按照所形成的密集点云,借助Pix9Dmapper对获取影像进行自动校正和DEM、生成,最后拼接为一幅完整的具备地物详细坐标的测区影像。
同时为了更为直观、具体的检验本次设计的基于无人机低空摄影技术的矿山地质灾害应急测绘方法可行性,对后期获取的影像数据处理以一种不纳入地面数控点的方式为主。后期评估环节,重点是将矿山地质灾害区的三维模型进行转化,将灾区地物信息存储入库并逐一分析,在操作命令驱动下对三维立体模型网络进行升级服务,通过灾区地物信息的分布,实现应急测绘。
点、线、面三位一体的数据获取以及以数据融合为主的数据处理方式是借助无人机低空航拍测绘的一种技术上的创新。在数据获取化解的点、线、面结合具体是指利用固定机翼无人机对灾区地物信息进行大面积垂直拍摄,再利用旋翼无人机对灾区重点进行倾斜拍摄,从而实现灾区应急测绘的实时反映。在数据处理环节,所谓的数据融合具体指的是建立重点灾区精细三维立体模型和大面积灾区立体三维模型。
1.6 三轴平台建模
本文我们选择Smart3DCapture作为建模工具,Smart3DCapture是以图形计算工具GPU为主的三维立体计算软件,可以最大限度地实现无人机低空拍摄要求的从简单影像中生成连续的、高分辨率的实景三维模型,构建导航坐标,导航坐标能够借助以下两种方法构建:一是,将陀螺直接固定在飞行机翼,利用对陀螺的控制获取高倍率的矩阵图形,作为导航分析而应用,即连接式导航,导航坐标具体是以数学方式体现。另一种则是将陀螺预装在用三个支撑台组成的机翼固定架上,利用控制其旋转使陀螺的控制轴一直和设定好的导航坐标重合。
1.7 灾害定量分析
在Smart3Dviewer中可以清楚可见灾区内有无植被覆盖的土坡以及是否有河流流经的土地,一旦发生高强度连续降雨,这些区域极有可能会出现泥石流、山体滑坡、崩塌等地质灾害。
用Smart3Dviewer含有的计算工具,在灾区边界进行数据搜集,获取可能会发生地质灾害的大致范围。按照受灾区域划定边界,在Smart3Dviewer中明确以灾区最低位置为基面,获得立方体所有土方量。对于受灾程度的评估,必须要掌握矿区灾情分布并充分认识到其风险等级,利用无人机低空拍摄获取到高分辨率、连续的影像资料,进而能够对灾区状况产生一个清晰认知。利用之前形成的三维模型,能够在短时间内分析泥石流、山体滑坡等地质灾害发生出现的规律和波及范围,确定危险程度,进而为政府第一时间的救援工作和灾后重建提供决策支持。
2 实验分析与结果
为验证本文方法的精确度,特与传统测绘方法进行对比。以南方某乡县矿山为例,安排航线方向为西北~东南方向。测灾区面积3.6km2,分为两个测区,两个测区基面高程198m,绝对航高526m,航带约长44km。本文航拍较传统航摄需要更高的重叠度,所以本次航向重叠度设为85%左右。确定航拍任务后,首先申请空域,之后有序安排无人机分别实施航摄,对两次拍摄获取的影像精确度进行比较。结果证明本文设计方法获得的重叠影像精确率相比与传统设计不仅在百分之九十四以上,且获得的影像数据分辨率表现稳定,满足灾区灾害应急测绘地图比例尺1:3500的影像数据标准。
3 结语
对低空摄影技术在矿山地质灾害应急测绘中的应用进行分析,依托无人机的飞行特点,根据低空摄影技术的工作要求,对矿山地质灾害应急测绘及时进行升级。实践表明,该设计的方法具备极高的有效性。
