基于无人机智能航拍的矿山地质精确测量探究
2020-09-01温宗超
温宗超
(广西中马园区数字城市科技有限公司,广西壮族自治区 钦州 535008)
矿产资源在社会经济的快速发展中起到重要作用。但是,高强度、长时间的矿山开采造成了严重的地质环境问题[1]。在各地质种灾害中,因采矿导致的地面塌陷数量最多,其次是地裂缝;因采矿导致的地面塌陷面积在几十万平方米以上。对此,准确地测量出矿山地质特征,建立地形数据库,能够为后续的矿山开采或地理信息/土地信息利用奠定良好的基础[2]。研究国内外相关研究成果和文献资料,发现矿山测量中多数使用基于GIS(地理信息系统)的测量方法,该测量方法过于依赖内部的数据库,在实际定位过程中,受到历史数据的影响,使定位结果出现较大的偏差,从而造成矿山地质测量不精确。
1 基于无人机智能航拍的矿山地质精确测量方法
1.1 检验正射影像图比例尺
以测绘矿山地形为目的,使用专业的航空摄影机,利用无人机从空中垂直拍摄地面,获得影像资料。飞行拍摄时,必须按照实际的要求飞行和拍摄才能获得可用于摄影测量的航拍像片。
通过无人机智能航拍获得的影像中存在像片倾斜和地面起伏引起的像点位移,由于航高引起的像片间比例尺和成图比例尺不一致的问题。航拍影像如图1所示。此时,运用数字摄影测量工作站生成该相对范围内的数字高程模型,校正影像的倾斜误差和投影误差,生成各单模型的数字正射影像图,将多个单模型的影像图拼接在一起,经过图像匀光处理后,依据测量的实际需求,裁剪出一定范围的影像就是正射影像图。

图1 航拍影像示意图
图中显示的a'~e'点表示地表位置,A~E点表示地表上地物的位置,a~e点表示拍摄的入射位置,从中可以看出拍摄的位置与地表并不平行,因此通过校正处理,得到正射影像图。
获得的航片经过后期处理后,在图像上进行简单的比例尺检验。利用已经正式出版的地形图检验正射影像图比例尺,已知地形图比例尺的比例为1:x,影像图比例尺为1:y,选取地形图上典型地物点p1和p2,量取图上距离为dx,影像图上相同地物之间图上距离为dy,在实际地形中地物之间的实际距离是一定的,此时可得到等式:

从等式中可知影像图比例尺与地物点的关系,以等式为依据,依次选取若干个典型地物点,利用推导公式算出一系列的y值,将其作为纵轴,横轴为次数,获得分布曲线,若y值形成的点围绕着一条固定数值线均匀分布,则这条数值线就是影像图比例尺的分母,可从图像上得到y值。若计算出的y值与影像图的比例尺分母相符,说明检验成功。
1.2 解译正射影像
从无人机航拍影像中获取地质信息需要通过解译的方式,在航拍正射影像上,拍摄的不同地物地质具有不同的内外特征,这些特征是识别地质地物的主要依据,在解译过程中,需要将目标特征作为解译标志,以此来实现航拍影像解译。将通过航拍影像直接观测到的特征作为直接解译标志,如形状、颜色、阴影和大小等,这些特征都是能够直接反映地质的真实特征。在矿山地质测量方法中正射影像解译标志说明如下表所示。
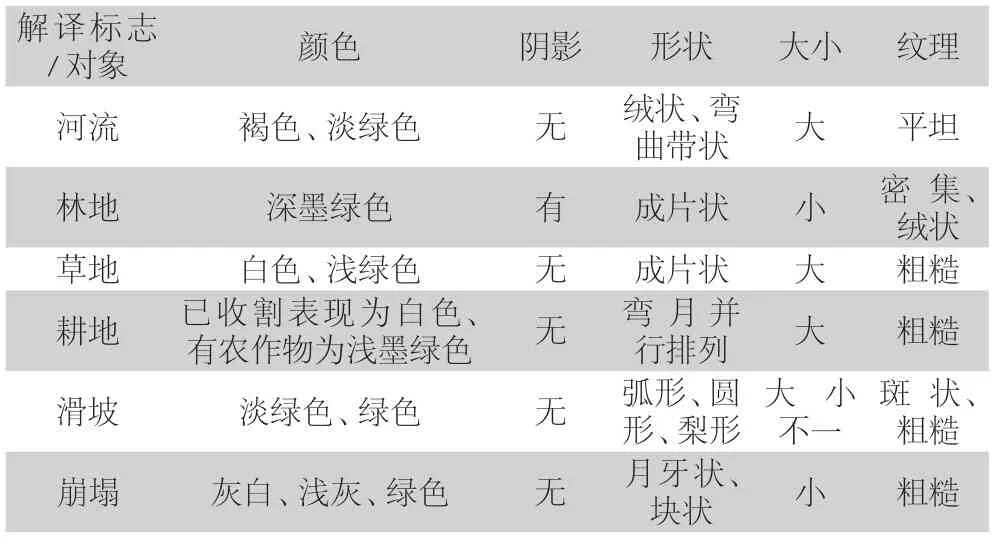
表1 矿山地貌解译标志说明
基于表中的解译标志,利用人工解译和计算机解译方式解译航拍图像,人工解译主要利用人眼直接观测影像或利用一些辅助设备,通过人的专业知识以及对地物的理解,达到解译图像的目的;计算机解译主要利用模式识别技术与人工智能技术融合的方式,加上专家知识库中的地质地物解释、成像规律的分析,理解图像达到解译的目的。
1.3 测量地质信息
考虑矿山地质精确测量的实际需求,从航拍影像解译过程中测量出地质信息。矿山的开采剥离了表层土壤和植被,是地表从植被过度到裸露的矿石造成的矿山环境的污染。研究航拍影像,可发现矿山中植被被破坏的区域清楚地呈现在影像上。因此,采用监督分类方法提取植被破坏的区域,选择具有代表性的训练区,从中获得样本选择特征参数,建立判别函数,利用该函数对位置像元分类,通过分类最小距离测量出矿山中植被被破坏区域的面积。
矿山开采会引起滑坡现象,具有一定的空间特征,如滑坡体和拉张裂缝等。对于地面崩塌,主要以塌陷坑、塌陷盆地或滑坡坍塌的形式存在,受到空洞效应或阴影效应的影响,光线被吸收,在影像上呈现圆形或椭圆形的黑色陷坑,一般情况下,没有与其连接的道路。计算其面积的前提是提取地面崩塌的边界,通过图像融合技术使航拍影像具有高的空间分辨率和多光谱特征,利用方向滤波一阶导数的运算增强边缘,使影像像元值均一的区域在输出图像中为0,对于像元值非均一的区域在输出图像中表现为亮色的边缘,为准确提取地面崩塌边界提供了支撑。
2 矿山地质精确测量方法实验研究
在矿山地质精确测量方法的实验研究中,考虑以往测量方法中存在的问题,设计对比实验,以测量的坐标点平均误差作为衡量标准,在相同的实验条件下,验证传统的矿山地质测量方法与提出的矿山地质精确测量方法的实际水平。
2.1 实验数据准备
选择某矿山的露天采场作为实验地点,测点工作直接在岩体上进行,获得原位测量数据。测量的原始坐标数据如下所示。

表2 测量点坐标系实际测量值
基于以上数据,使用不同的矿山地质测量方法获得测量点的坐标位置,根据实验结果对比分析。
2.2 实验结果及分析
使用不同的矿山地质测量方法获得的测量结果及误差结果如下表所示。

表3 传统的测量方法实验结果
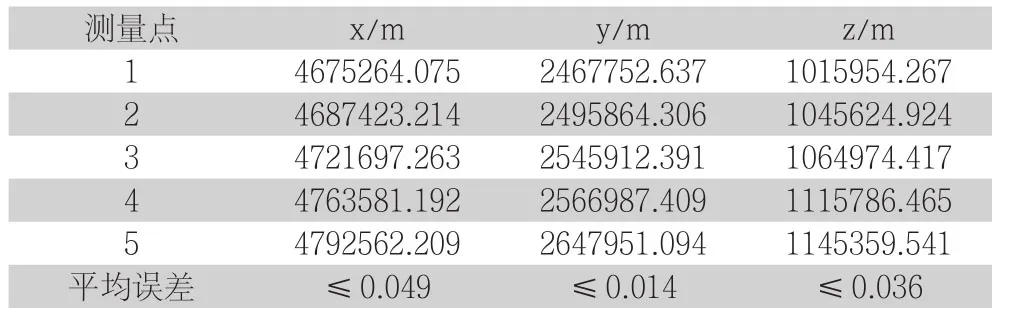
表4 提出的测量方法实验结果
表中平均误差是坐标系测量值与实际值计算得到的结果。对比观察表中结果,对于相同的5个实验点,表3中结果显示,测量出的坐标系在x方向、y方向和z方向的平均误差分别为3.207、1.923和2.024;表4中的结果显示,测量出的坐标系在x方向、y方向和z方向的平均误差分别为0.049、0.014和0.036。对比各个方向上的平均误差可知,提出的基于无人机智能航拍的矿山地质精确测量方法在坐标测量中平均误差低,说明该测量方法对矿山地质的定位十分准确,地质测量更为精准。
3 结束语
本研究以无人机智能航拍手段作为获取矿山地质影像资料,以此为基础,开展了航拍影像的处理,正射影像比例尺的检验以及影像解译、地质测量等工作,设计的基于无人机智能航拍的矿山地质精确测量方法。在研究过程中,通过设计的对比实验,验证了设计的矿山地质测量方法测量误差更小,说明该测量方法非常适合作为矿山地质分析与研究的数据源。
