基于地基激光雷达和手持式移动激光雷达的单木结构参数提取精度对比
2020-08-31范伟伟刘浩然徐永胜林文树
范伟伟,刘浩然,徐永胜,林文树
(东北林业大学 工程技术学院,黑龙江 哈尔滨 150040)
单木结构参数是森林生态系统中的重要参数,在一定程度上反映森林生态系统的生产力水平和健康状况,是研究森林生态系统的基础[1]。传统的单木结构参数主要通过每木检尺方式进行实地测量,工作量大,效率低,难以进行大面积的森林资源调查。目前随着非接触式遥感技术的快速发展,激光雷达扫描提供了一种高效且精确获取单木结构参数的途径,相较于手工测量方式在时间、成本及精度等方面具有较大优势[2]。
近年来,激光雷达在森林资源调查中发挥着越来越重要的作用。地基激光雷达(Terrestrial laser scanning, TLS)是指应用于地面静止平台上的激光雷达,它能够获取树木的详细三维点云数据,可以有效地获取精细的单木垂直结构参数,但其在林业扫描中存在遮挡效应,导致树木的枝叶等冠层点云扫描不完全,因此其扫描精度也受到一定程度的影响[3]。解决或减少地基激光雷达遮挡效应的一般方法是进行多站扫描,使其尽可能从多个站点获得研究样地全方位的扫描点云,但多站扫描会导致扫描效率大幅度降低以及数据处理复杂程度增加。相比传统地面静态三维激光扫描需布设标靶、架站、扫描、移站等操作,移动激光扫描(Mobile laser scanning,MLS)结合了全球导航卫星系统(GNSS)、与惯性测量单元(IMU),使得边扫描边成图的作业模式成为现实,大大提高了森林资源调查效率[4]。其中手持式移动激光雷达(Hand-held mobile laser scanning,HMLS) 以人为平台,实时获取点云数据并采用高精度的即时定位与地图构建(Simultaneous localization and mapping,SLAM)算法来进行拼接,克服了MLS林下卫星信号较弱的问题,具有扫描方式灵活,效率高等特点[5]。但由于HMLS 扫描角度与范围的限制,使得其点云密度与扫描精度与地基激光雷达数据仍有一定差距。
国内外学者利用以上两种扫描方式进行了一系列单木结构参数提取的研究。Aschoff等[6]使用TLS 数据利用滤波及分层Hough 变换的方法估测了样木胸径及单木位置等参数。Maas 等[2]使用TLS 提取了研究样地中单木胸径、树高等参数,获得了较好的胸径估测与单木识别结果,但遮挡效应对树高的提取精度不佳。Király 等[7]根据TLS 数据提取的数字表面模型预测树冠位置的局部最高点,并在此基础上进行树高估测,取得了良好的树高估测结果。此外TLS 还被应用于树冠面积、树木体积、生物量等参数的提取与树木三维模型的构建当中[8-13]。2012 年,Kukko 等[14]提出了背包式激光扫描的概念,并将激光扫描仪与惯性测量单元和全球导航卫星系统相结合,设计了一个类似于机载激光扫描的背包式激光扫描仪。Liang 等[15]利用该背包式激光扫描仪对森林样地进行扫描,由于林下卫星信号较差而导致平台位置不太准确,因此获得的背包点云数据的准确性不如多站配准后的地面激光扫描数据。同年,Bosse 等[5]设计了一种不需要卫星定位信号的手持式移动激光扫描系统,该系统采用即时定位与地图构建(SLAM)算法来获取实时点云数据并进行拼接。Ryding 等[16]和 Bauwens 等[4]综合比较了手持移动激光扫描、地基激光扫描获取森林结构参数的效率与精度,证明了手持移动激光扫描可提供一种高效的森林结构参数测量技术,其中地基激光扫描得到的树冠信息更丰富,而手持移动扫描获取的胸径数值更为精确。
国内研究中,利用静态地面三维激光扫描点云数据提取单木结构参数起步较早。北京林业大学冯仲科教授团队首次将地面三维激光扫描技术应用到我国林业资源调查中,并对该技术在林业中的应用进行了一系列的研究,得出激光扫描技术提取的单木结构参数在林业测树允许的范围之内[17-21]。李丹等[22]、刘鲁霞等[23]、张珊珊等[24]、顾海波等[25]基于TLS 数据利用相关算法提取了树高、胸径、胸高断面积及树干干形等单木主要结构参数,表明TLS 数据对胸径的估测结果较好,对树高的估测结果较差,而多站拼接的TLS 数据相比于单站TLS 数据对单木结构参数的估测精度要好。林文树等[26]、孟园等[27]利用TLS 数据计算了树冠投影面积、树冠体积以及叶面积指数等参数,结果表明TLS 数据能够较好地还原树木冠层信息,可以实现对以上参数的精确提取。黄旭等[28]利用背包式激光雷达获取数据并通过相关软件对落叶松单木结构参数进行了提取,结果表明胸径提取结果精度较高,而树高提取结果由于林下遮挡效应导致提取精度较低。
综合以上文献可以看出,地面移动激光扫描具有扫描速度快,高效自动配准等特点,在林业资源调查上具有一定的应用潜力,但相较于地基激光雷达其扫描范围有限,存在树冠点云扫描不完整的缺点,目前国内针对地面移动激光雷达扫描在林业上的研究较少,特别是中高郁闭度林分。因此,本研究以郁闭度较大的哈尔滨市林业城市示范基地黑皮油松林为研究对象,通过地基激光雷达扫描(TLS)与手持式移动激光雷达扫描(HMLS)获取三维点云数据,利用相关软件对点云进行处理并提取单木结构参数,从数据获取与处理效率、点云密度与质量、单木结构参数提取精度等方面进行对比,以期为高效率的森林资源调查提供参考。
1 实验样地概况与数据获取
1.1 样地概况
研究区域位于东北林业大学哈尔滨实验林场, 地 理 坐 标 为 127°35′ ~ 127°39′E,45°42′ ~45°44′N,海拔 136 ~ 140 m。在气候特点上,该地区具有温带季风气候特征,属于温带湿润地区,春季干旱少雨;夏季温热湿润,降雨集中;秋季降温迅速,常有冻害发生;冬季漫长干燥,寒冷多雪,林木生长速度缓慢。年平均气温2.4 ℃,最高气温34 ℃,最低气温-40 ℃,降雨多集中在夏秋两个季节,年平均降水量在700 mm 以上。研究样地为一块20 m×20 m 的黑皮油松Pinus tabulaeformis人工林,样地内地形坡度平缓,林木较为密集,郁闭度较高,林下杂草和灌木较为稀少。
1.2 实验数据获取
本研究采用 FARO Focus3D X130 地面三维激光扫描仪进行静态激光扫描。在样地内分别设置单站扫描和多站扫描,每一测站扫描分辨率设置为1/5,扫描质量设置为4X,扫描时间均为每站8 min,其中单站扫描测站设置在样地中心,多站扫描站点均匀分布在样地内,具体设站分布如图1a-b 所示。站点设置要求四周无明显遮挡物,通视良好,尽可能减少扫描时的遮挡效应。同时在相邻测站间放置标靶球,保证相邻测站间能看到至少3 个相同的标靶球,以确保后期不同测站间的精确配准,记录TLS 扫描单站(TLS1)扫描与4 站(TLS4)扫描所用的时间。FARO Focus3D X13 与ZEB-REVO 的具体性能指标见表1。
同时采用ZEB-REVO 手持式扫描仪进行地面移动激光扫描,ZEB-REVO 手持式扫描仪是一种结合惯性测量单元(IMU)的地面移动式激光扫描仪,只需要一次步行扫描就可以获得树木全景扫描点云数据。扫描前在样地设计闭合路径的扫描路线以及合适的扫描平台高度(1.5 m),根据样地实际情况,扫描路径被设置为闭合的之字型路径(图1c),样地内郁闭度较大的区域按照路径进行了多次扫描,扫描时匀速缓慢通过样地树木,确保实验样地内每棵单木都被完整扫描,记录仪器扫描时间,利用TLS 与HMLS 扫描样地场景(图2)。
最后,通过人工实测对样地内所有胸径大于5 cm 的单木,使用胸径尺、测高仪和皮尺分别测量了胸径、树高、冠高和冠幅等参数,并用全站仪测量其相对位置,为后续的数据配准工作提供参考。根据实测的冠幅和冠高等数据,通过经验公式计算树冠投影面积[29]。实测样地30 棵单木结构参数结果见表2。

表1 激光雷达性能参数对比Table 1 Comparison of Lidar performance parameters
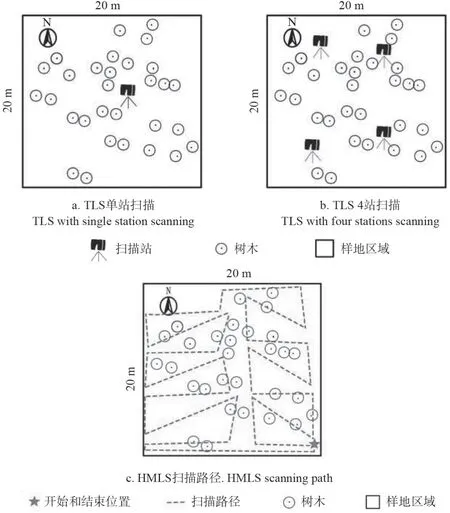
图1 TLS 扫描位置及HMLS 扫描路径Fig. 1 TLS scanning position and HMLS scanning path

图2 扫描场景Fig. 2 Scanning scene
2 研究方法
根据采集样地的单站与多站的TLS 数据与HMLS 数据,对研究样地内的单木点云进行研究区域裁剪、去噪、高程归一化等一系列的预处理,利用LiDAR360 软件的地基雷达模块实现单木的分割与单木结构参数的提取,基于研究样地点云数据提取的树木相对位置信息进行数据的配准,综合对比验证以上两种典型的地面激光雷达扫描方式的参数提取精度,具体技术路线如图3 所示。
表2 单木结构参数测量Table 2 Measurement of individual tree structure parameters
2.1 数据预处理
运用地基激光雷达进行多站扫描后,需要对每测站的扫描数据进行一系列的预处理。利用FARO SECENE 软件导入数据并生成点云,然后根据识别不同扫描点放置的同一标靶球进行多测站间点云的配准,配准完成后根据点云配准平均距离误差与系统阈值的大小关系来判定是否需要重新进行配准,当误差小于系统阈值时完成配准,并裁剪出研究区域内的30 棵树木,最后将其导出得到.las 格式的点云数据文件。由于导出的点云数据不仅包含点云的位置信息还包括点云颜色信息,通过Cloudcompare 软件删除点云的颜色信息,减少数据的冗余。由于实验样地存在一定的坡度,树木点云起始高程不同,需要将点云高程归一化以获得树木点云的相对高度,去除地形对树高估测的影响。样地地面灌木杂草较多,根据研究样地的平均枝下高与树高最大值设置一定的高程阈值,运用开源软件Cloudcompare 对阈值内非地面点的灌木杂草信息与明显高于样地冠层的噪声信息进行去除,获得研究样地的单木点云数据。TLS多站扫描数据预处理结果如图4 所示。

图3 技术流程Fig. 3 Technical flow chart

图4 TLS 点云预处理Fig. 4 TLS point cloud preprocessing
对于手持式地面激光雷达数据,扫描完成后将ZEB-REVO 原始数据导入全自动SLAM 算法配准软件对点云进行匹配,生成自动配准后的3D 点云,理论上该扫描方式进行数据配准的时间等于扫描时间。需要注意的是在数据导入软件进行配准处理的过程中需要设定合理的阈值来除去扫描过程中扫描者的人影点云,否则导出点云将会带有大量人影的点云信息,影响数据质量。获取研究样地的点云数据后需要对研究区域进行裁剪、去噪以及高程的归一化,相应的流程与参数设置与TLS 数据基本一致,这里不再赘述。HMLS 数据预处理结果如图5 所示。
2.2 单木结构参数提取
2.2.1 单木分割
根据归一化后的点云数据,提取研究样地的单木结构参数首先要对样地整体点云进行单木分割,并基于单木分割结果进行单木结构参数的提取与比较。单木分割依靠LiDAR360 软件中地基雷达模块的单木分割功能实现,该功能利用比较最短路径算法实现单木点云的分割,原理是首先利用基于密度的聚类算法进行树的主干检测,然后检测树冠点到达主干根部的路径距离,根据树冠点到达主干根部最短的路径距离分离不同单木的树冠点,实现树冠点云的分割,最终实现单木点云的整体分割。该算法在郁闭度高的林地中具有较高的分割精度[30]。根据样地林木的实际情况,输入最小树高以及胸径值的大致范围,得到单木分割点云结果(图6)。
2.2.2 单木结构参数提取
根据点云分割结果,LiDAR360 地基模块能够基于树木主干中心点(种子点)批量提取样地对应树木的单木结构参数,包括胸径、树高及树冠投影面积,检查研究样地单木分割结果未发现错分、漏分的情况。胸径拟合功能能够根据用户设定的最小聚类点自动对每棵树进行聚类并利用最小二乘方法拟合圆获取对应的胸径值,由于部分胸径点云不完整或胸径聚类点过少等原因,会造成系统拟合的点云与实际单木胸径处点云不相符,导致提取的胸径值与实际测量值有较大偏差(图7)。因此需要手动选取1.3 m 胸径处的切片点云进行重新拟合,避免由于系统识别点云不完整导致的错误拟合。对于样地内倾斜度较高的树木点云,由于点云切片具有一定的厚度,根据输入点云的二维平面坐标进行圆拟合或者椭圆拟合过程中会造成较大的偏差,选择圆柱拟合能够获取较为精确的胸径提取值。树高和树冠面积均基于单木聚类分割结果获取的单木中心位置最高点与单木边界计算得出。
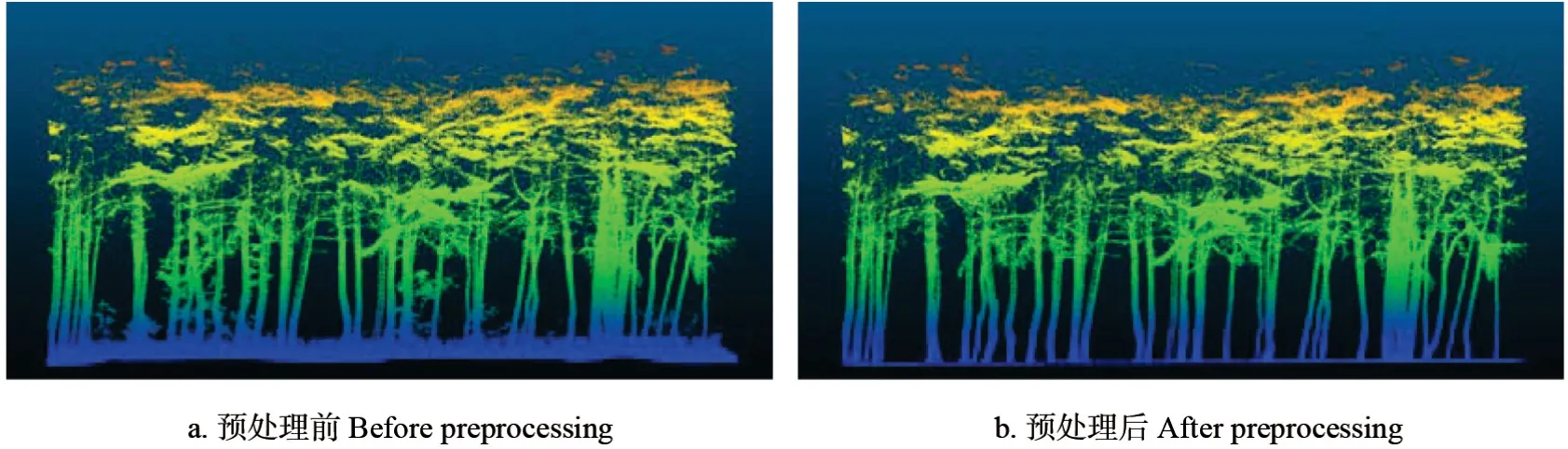
图5 HMLS 点云预处理Fig. 5 HMLS point cloud preprocessing

图6 单木分割结果Fig. 6 Individual tree segmentation results
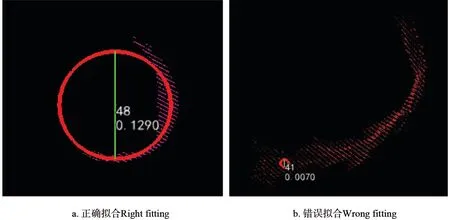
图7 胸径拟合的典型情况Fig. 7 Typical case of DBH fitting
2.2.3 数据匹配
根据实验样地单木分割完成后的TLS 数据与HMLS 数据种子点文件获取每单木的相对位置,进行单木匹配,一一对应TLS 数据与HMLS 数据的树木编号,最终与实测的样地树木位置信息进行匹配,以用于后续数据的对比分析。匹配结果如图8 所示。
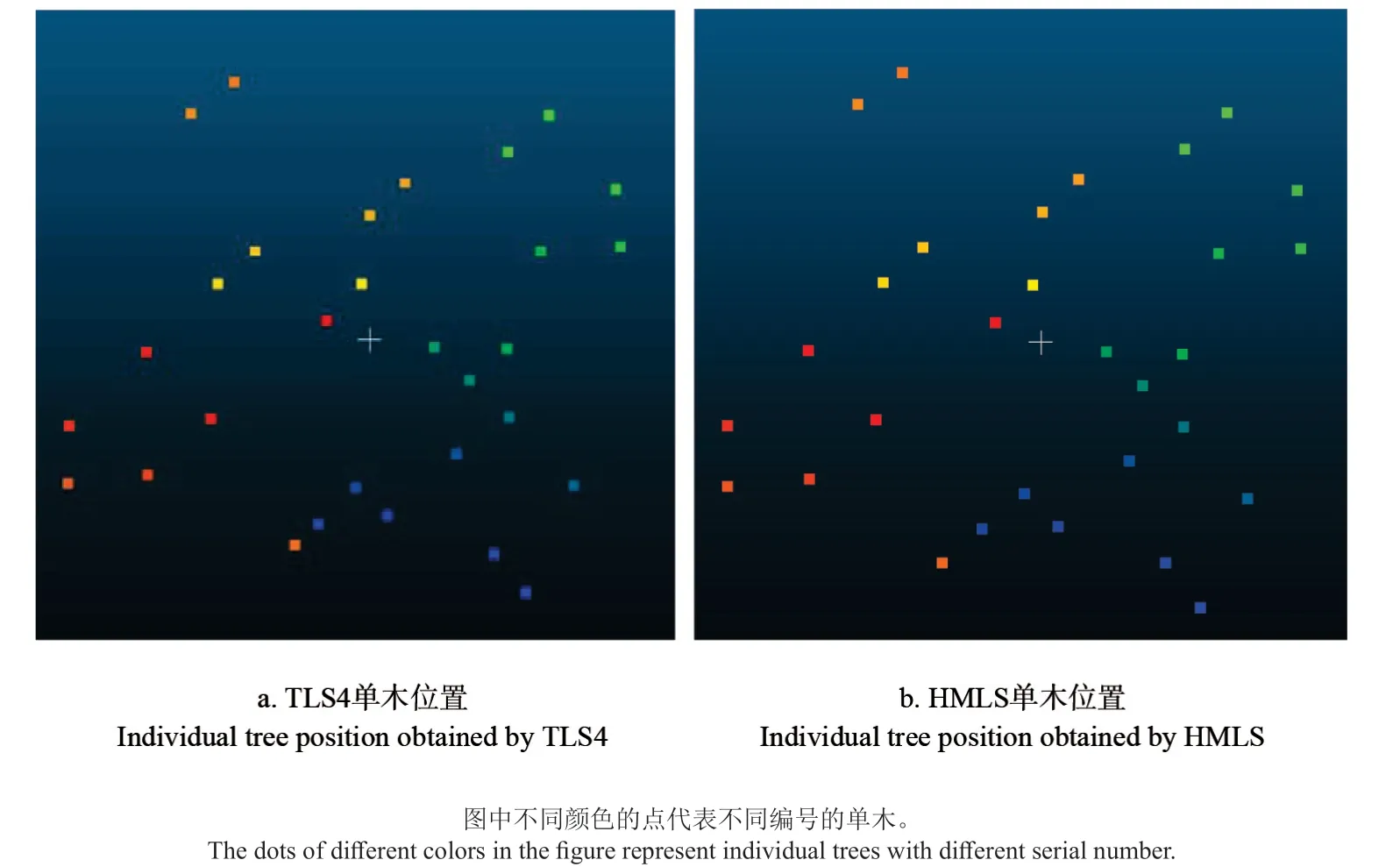
图8 单木位置匹配Fig. 8 Position matching for individual trees
3 结果与分析
根据种子点文件的单木识别结果对照样地实测数据的单木位置,得出不同扫描方式的单木识别结果,在20 m×20 m 研究样地内的30 棵树除了TLS单站由于自身存在的遮挡效应漏检了一棵树之外,TLS4 站扫描和HMLS 扫描均能够正确检测出树木数量与相对位置,但扫描时间效率、点云质量及基于扫描数据提取的单木结构参数精度不尽相同。
3.1 时间效率对比
首先进行数据获取效率的分析,地基激光雷达单站扫描时间为8 min,多站扫描的数据获取时间还应考虑安装标靶球以及移站的时间,手持式地面移动激光雷达单次扫描20 m×20 m 的实验样地用时20 min,其自动配准的时间与扫描时间一致。现场测量的时间与实验样地林木密度和量测员作业的熟练程度有较大关系,测量研究样地内30 棵单木的胸径、树高、冠幅、单木位置等参数所需时间大约为80 min。此外,数据处理时间包括点云的预处理、单木分割及参数提取等程序的运行和数据导出时间,具体结果如表3 所示。由表3 可看出,HMLS 在完整扫描高郁闭度的黑皮油松林样地时扫描速度大约为27 m2/min,地基激光雷达4 站完整扫描该样地速度为10 m2/min,现场实测速度约为5 m2/min,在扫描速度上HMLS 扫描约为TLS4 站扫描的3 倍,为现场实测速度的5.4 倍,但低于TLS 单站40 m2/min 的扫描速度。

表3 不同数据获取方式所用时间Table 3 Time taken by different data acquisition methods
3.2 单木点云质量对比
3.2.1 胸径处点云质量
在样地中心位置随机选取一棵扫描完整的树木,根据单木分割结果提取该树木的HMLS 扫描点云和TLS 4 站扫描点云,通过对单木1.3 m 胸径处点云进行10 cm 厚度的切片处理得到单木胸径切片俯视图,如图9 所示。从图9 可以看出在HMLS 胸径处点云相比较于TLS4 数据具有较大的离散性,点云噪声更大。
根据样地树木1.3 m 胸径处截取点云,以实际胸径点云长度与拟合胸径圆周长的比值作为胸径点云闭合度的参考标准,观察横截面胸径点云的完整程度并统计胸径横截面闭合的占比情况,得出不同扫描方式胸径处点云的完整程度对比,如图10 所示。从图10 可以看出HMLS 在合理的测量方案下基本能够获得完整的胸径处点云。TLS单站扫描有70%的树木未获得一半以上的胸径处点云,导致了胸径拟合误差较大。TLS4 站扫描与相比于TLS 单站扫描明显提高了胸径处点云的扫描完整性,97%的树木获得了一半以上的胸径处点云,对胸径估测精度结果有较大提升。

图9 两种扫描方式的胸径点云对比Fig. 9 DBH point cloud comparison by two scanning method

图10 不同扫描方法的胸径处点云完整度Fig. 10 Degree of integrity of point cloud at DBH by different scanning methods
3.2.2 单木点云质量
根据单木分割结果在HMLS 点云和TLS4 点云中分别提取一棵相对应的完整单木点云,其侧视图如图11 所示。由于HMLS 的扫描范围有限,激光不能到达大部分树梢,样木树冠上部的点密度相当低。将单木点云以树高为方向按照0.3 m 为单位竖直切片,遍历每一切片点云获取该切片的点云数量,得到点云平面投影密度对比图,如图12 所示。图12a 为HMLS 点云平面投影密度,图12b 为4 站TLS 点云平面投影密度,从图12 中可以看出TLS4 数据单木点云数量约为HMLS 的64倍,胸径处点云TLS4 站数据为HMLS 的13 倍,HMLS 点云在胸径处具有相对较大的点云密度,这可能与设定的扫描平台高度有关,且HMLS 相较于TLS4 拥有更好的胸径处切片点云完整度。此外,HMLS 相较于TLS4 站数据存在冠层点云缺失问题,这对树高和树冠面积等参数的提取都非常不利。综合对比来看,TLS4 站数据不论在点云密度与冠层点云的覆盖度都要优于HMLS 数据。

图11 单木点云对比Fig. 11 Comparison of individual tree point cloud
3.3 单木结构参数提取精度对比
3.3.1 胸径精度对比
根据拟合树木主干1.3 m 处截取的点云最终提取研究样地30 棵单木的胸径值,并与实测单木胸径值进行回归分析,结果如图13 所示。从图13 可以看出,经过4 站拼接的地基测量结果与实测值相关性最高,R2=0.95,均方根误差RMSE=1.84 cm,HMLS 数据与TLS4 数据相关性基本一致R²=0.92,RMSE=1.60 cm。单站 TLS 数据拟合效果最差,R²=0.84,RMSE=2.96 cm,由于树木遮挡效应大多数TLS1 数据胸径点云存在扫描不完整的现象,造成拟合不准确,导致胸径拟合相关性较低。

图12 单木点云密度对比Fig. 12 Comparison of individual tree point cloud density
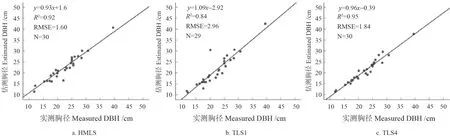
图13 胸径估测结果Fig. 13 DBH estimation results
3.3.2 树高精度对比
根据单木分割结果提取树高与实测结果进行回归分析,结果如图14 所示,从图14 中可以看出,而HMLS 数据与实测树高的R2仅为0.31,RMSE=1.89 m。TLS1 点 云 树 高 提 取R²=0.42,RMSE=1.32 m,这两种扫描方式精度都偏低,从实际点云可以看出HMLS 数据对树木冠层扫描点云较为稀疏,导致提取树高相较于实测数据偏低1 ~3 m,形成了显著误差,TLS1 数据由于样地内单木的遮挡效应以及距扫描站点较远的单木点云采样频率低、点云扫描不完整等因素导致了树高提取结果与实测值相比误差也较大。TLS4 点云提取树高和实测树高相关性较高,R2分别达到了0.7,RMSE 也减少到了0.95 m,说明多站拼接后的地基雷达数据能够显著提高树高的估测精度。此外,由于实验样地树木郁闭度较高,在使用测高仪进行树高量测时激光无法到达树木最高点,尤其是对于优势木树高的量测存在一定的误差,这也是造成估测树高与量测树高相关性较低的原因之一。
3.3.3 树冠面积
通过经验公式计算的树冠投影面积与根据单木分割结果提取的单木树冠面积进行回归分析,如图15 所示,HMLS 数据与TLS1 数据在树冠投影面积的误差和相关性均与根据经验公式计算的树冠投影面积值存在较大的差距,R2在0.4 左右,RMSE 在15 m2左右,这与单木冠层点云数据扫描不完整有关。TLS4 数据在树冠投影面积与实测具有较大的相关性,R2达到了0.77,但RMSE 为9.23 m2,与经验公式计算值仍有较大的误差,结合研究样地单木实际树冠形状可以看出,试验样地存在一些不规则的树冠形状,不适用于椭圆模型的树冠投影面积计算公式,也是造成估测值与经验公式计算值存在误差的原因之一。

图14 树高估测结果Fig. 14 Estimation results of tree height
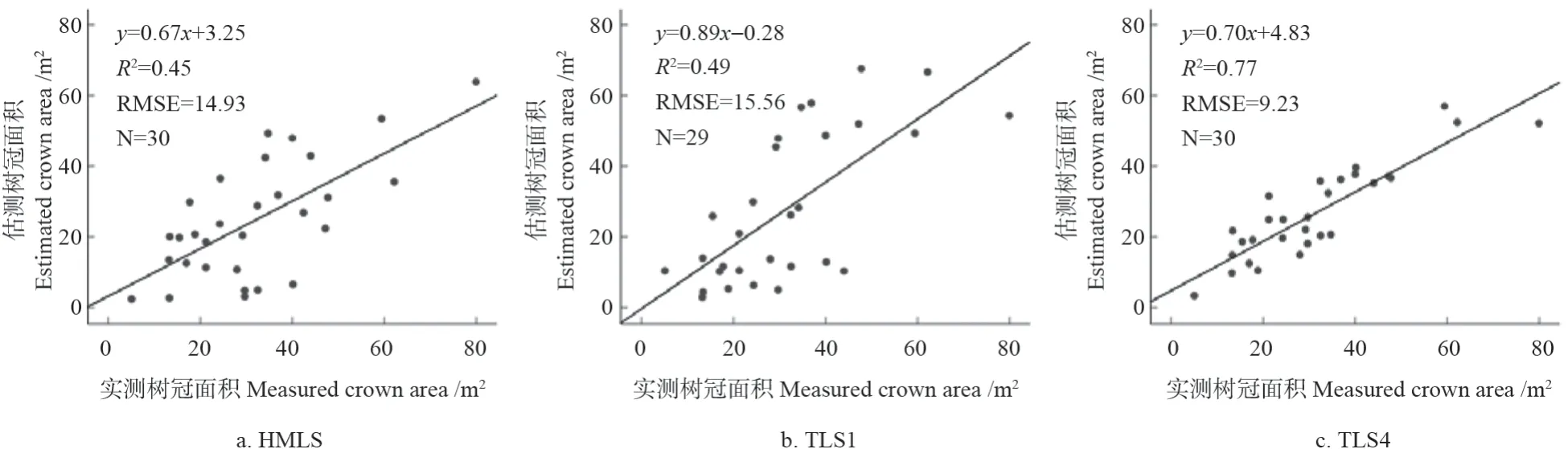
图15 树冠面积估测结果Fig. 15 Estimation results of crown area
4 结论与讨论
4.1 结 论
本研究以东北林业大学哈尔滨实验林场的黑皮油松林为实验样地,获取了样地TLS 数据和HMLS 数据,利用 Cloudcompare 和 LiDAR360 等软件提取单木结构参数并与实测数据进行对比,从扫描时间效率、点云质量及单木结构参数提取精度等方面进行对比分析。研究结果如下:
1)在数据获取效率方面,地基雷达单站数据具有最快的扫描效率,但由于遮挡效应以及扫描角度固定,估测单木结构精度有限。多站地基数据具有最高的估测精度,但其需要安装标靶球以及移站,扫描效率低下,不具备进行大规模森林资源调查的潜力。手持式地面移动激光雷达ZEBREVO 能够在15 min 内完整扫描一片20 m×20 m的实验样地,在保证一定的精度前提下,HMLS在点云数据获取速度方面相较于其他数据获取方式具有很大优势,而且仪器小巧,扫描方式灵活,能够满足在复杂林区作业的要求。
2)在点云质量方面,地基单站单木点云由于遮挡效应均存在不同程度的胸径处点云缺失,增加地基雷达的测站数能明显减少遮挡效应,提高单木结构参数估测精度。手持式地面移动激光雷达在合理的扫描方案配置下能够获取完整的胸径处点云,获得准确的胸径估测值。从整木点云密度来看,手持式地面移动激光雷达存在较为明显的冠层点云缺失,造成树高、树冠面积的提取精度误差较大。多站地基雷达扫描具有较好的冠层扫描结果,但其点云密度过大造成数据处理成本较高,如何通过合理的测站配置在不造成数据冗余的情况下获得相对较好的单木因子估测结果是研究的关键。
3)在数据获取精度方面,HMLS 数据在单木胸径拟合结果方面表现出了较高的精度与相关性,R2达到了0.92,证明手持式地面移动扫描在合理的扫描路径布设下,能够较好地避免地基激光雷达扫描出现的遮挡效应,并获取完整的树木主干胸径处的点云,满足胸径获取的精度要求。但对于树高和树冠投影面积等参数,HMLS 数据相较于经过多站拼接的TLS数据体现了较差的相关性,R2值均小于0.5,误差较大。
4.2 讨 论
综上所述,TLS 与HMLS 扫描在扫描效率、点云质量、数据精度等方面存在各自的优缺点,在实际扫描过程中能够采取一些手段实现更好的扫描效果。对于TLS 扫描,多站拼接TLS 数据相比于单站扫描的TLS 数据能够获得更为准确的测量结果,单站扫描在林下条件复杂,郁闭度高的实验林区具有较大的偶然性,容易造成树木之间的遮挡,且树木距离扫描站越远,遮挡越严重,识别率越低。多站扫描能够减少这种偶然性,但需要架设标靶球,后期还需要手动拼接,工作量大,因此需要根据林地的实际情况合理设置扫描站数与设站位置,在最大可能减少遮挡效应的同时尽可能减少设站数。HMLS 扫描由于其扫描范围有限,因此需要选择合适的扫描平台高度以获取高质量的扫描数据,本研究选取的1.5 m 平台高度能较好地获取树干及地面的扫描点云,但对于树木冠层的扫描并不完整,需要利用无人机或机载平台的点云数据进行补充。此外,应当根据不同类型的林木选择适当的扫描路径并保证扫描时匀速地通过实验区域,确保仪器扫描和配准点云的完整性。
本研究综合对比了地基和移动式激光扫描方式,但仍存在一定的不足。首先,本研究所使用手持式地面移动扫描仪ZEB-REVO 在郁闭度较高的林区环境下扫描范围有限,低于理论上室内封闭环境下的30 m 扫描半径,造成树木冠层点云扫描不完整,影响数据质量。其次,本研究以森林结构较为简单、树种单一的人工林为研究对象,对于森林结构较为复杂的天然林可能存在的林下灌木密集、扫描遮挡严重等问题还需要在接下来的研究中解决。
本研究后续还有一些亟待解决的问题。如使用的激光雷达点云数据处理软件在流程化处理林业点云数据方面已经较为成熟,但在某些参数提取的精度上还需进一步完善,在批量拟合胸径时由于聚类点不完整容易造成错误的胸径拟合结果,还应开发一种更适合林业研究的聚类算法,以获得更高精度的单木结构参数提取结果。此外针对HMLS 的冠层点云缺失问题,本研究后续还需要进行多源数据融合研究,尤其是联合空-地的激光雷达数据,能够与HMLS 数据形成互补,实现高效率、高精度的森林资源调查。
