桥门式起重机作业人员实操考试自动评分系统实现方法的研究
2020-08-28林健民
林健民
(福建省劳安设备技术开发中心,福建 福州 350003)
随着全国各地起重机械设备数量的激增,特种设备考核机构与作业人员的人机比例矛盾越发突出。目前,特种设备作业人员实行网上报名,利用计算机准确迅速地对作业人员的专业知识进行无纸化考试并自动批改试卷,但是,实操考试却缺少有效的自动化解决方案。本文针对桥门式起重机无人化考评提出三种实现方式进行研究与讨论。
1 桥门式起重机实际操作考试模式介绍
1.1 考试用具介绍
如图1所示,图中圆柱体为考试中所需要使用的载物,该圆柱体是一个直径50cm高60cm,重量约为50kg的金属铁桶。初始位置摆放在A圆的最内圆处,挂进吊钩。
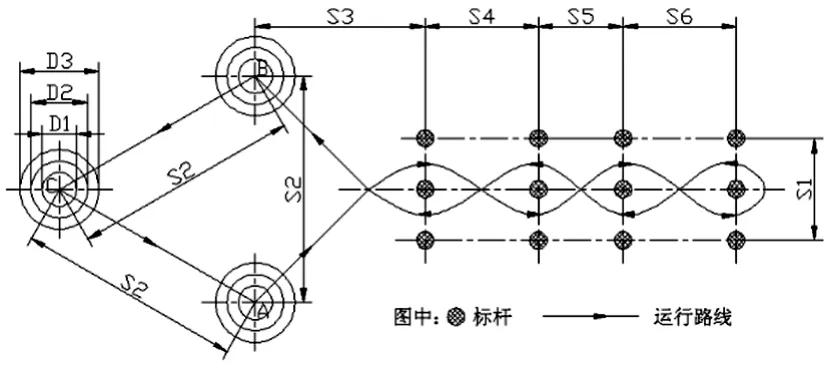
图1
A、B、C为画在地面作为定点停放的标识,每个标识的圆圈直径从内到外别为60cm、70cm、80cm的。
12个标杆规格完全相同的,主要考察学员的稳钩能力与吊运载物过程中的精确性与稳定性,每个标杆高170cm,直径2.5cm,标杆底部为20cm×20cm×1cm的正方形底座,底座不固定,排列成3×4的方阵式。
考试场地中各考核点放置距离如表1所示。

表1(单位cm)
1.2 考试过程介绍
考试由现场考评员发号开始考试指令,学员将水桶A调离地面100~150cm,进入标杆方阵,按照箭头所示方向绕桩行驶,出标杆方阵后,学员需要将铁桶抬升至200cm以上高度,运行到B圆准确放下,再以相同方式吊运至C圆、A圆,整个考试过程结束,考评员通过记录学员吊运过程中放置精确度,碰杆、倒杆情况,以及司机室内现场操作能力进行记录、打分。
1.3 考试评分标准
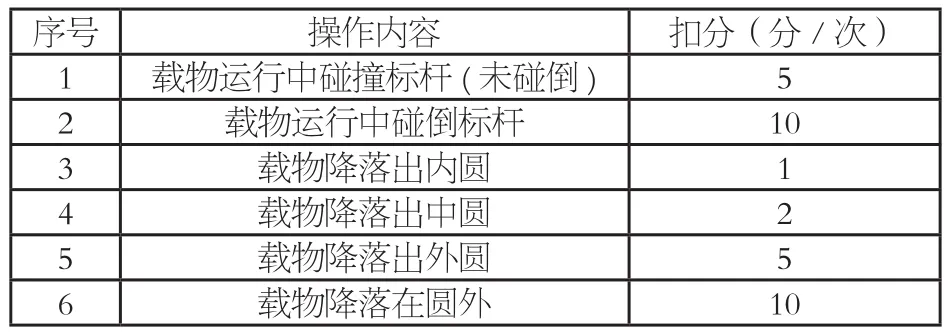
表2
2 无人化考评方法实现模式探究
2.1 激光雷达
激光雷达具有激光雷达具有高精度、高分辨率的优势,同时,结构简单,测距速度快、系统稳定可靠。本系统中地面平坦,所有障碍物又都垂直于地面, 采用两个2D激光测距雷达分别在指定的分别监测定点停放以及吊物的绕杆情况,利用激光测距雷达扫面的平面形成坐标系,确定定点停放位置与标杆坐标,两个雷达测量出吊物此时的坐标位置,使其和地标原点进行对比。
得出的值就可以判断吊物禁止于地面状态时所处的位置。同时,在吊物底部安装超声传感器,判断吊物的起升高度高度,以判断吊物是否按要求完成指定操作,是否达到指定起升高度以及是否运行在激光雷达的监测范围,同时,通过激光雷达数据判此分数。
2.2 视觉分析技术
利用双目视觉识别原理,在场地布置中预先将定点停放点、标杆、吊物预设为对比度反差较大的颜色,同时,利用工业摄像机拍摄考试现场,采用位置法和图像法。此类方法是基于位置控制方案是一种高精度的伺服控制方法,其将视觉信息进行数字化,将整个考场物体设置在三维坐标中定义相关的误差数据,在进行数据识别时,根据吊物在运行、停放、过杆的过程中,构造的几何数学模型推断出定点、标杆、吊物等目标点与双目摄像头之间的位置,从而将整个过程中的目标运动均通过相对坐标来定制或传达到上位机,通过上位机采样分析计算得出考试结果。
2.3 传感器技术
系统采用压力传感器、倾角传感器、光栅传感器作为现场采集用设备,在定点停放位置分别放置3组圆形的压力电缆,用于检测定点停放的精确度。在标杆中分别安装倾角传感器用于判断是否碰杆或碰倒杆。在行进路线与场地边界布置光栅传感器,判断吊物在绕杆过程中是否通过正确的路线以及整个考试过程中是否超出边界。将各个节点通过Zigbee无线通信传输模式构成无线传感器网络,将各传感器信号传输至上位机模块,监测考试情况以及考试结果。
3 利弊分析
3.1 激光雷达
由于3D激光测距雷达存在价格昂贵、体积大而笨重,尤其是成像速度慢的弱点在很大程度上制约了它的进一步应用,故本次研究主要采用2D激光测距雷达,但是,2D激光雷达只能对指定二维平面进行扫描,无法完成普通阵面扫描雷达的三维深度视觉功能,此问题导致吊物必须精准地运行在检测面中,对检测平面布置的精确性有较高的要求,同时,要求根据超声传感器的测距情况对激光雷达接收的多组数据进行筛选取出正确的考试数据判断得分。本系统硬件价格较为昂贵,场地布置与程序编写难度适中,对场地要求低,布置得当,精确度最高。
3.2 视觉识别技术
视频拍摄出的画面能更加直观地表现出吊物与地标圆形的距离,视频拍摄技术所体现的距离远不如激光雷达来的精确,分析图像所需要的程序编写较为困难,需要对图像进行深入的分析,对上位机的硬件配置有较高的要求。上位机配置不足的情况下会导致系统卡顿、分析速度慢等情况。同时,对于现场的场地与物体颜色区分有要求,需要对场地内所有物件进行颜色定制,以便呈现最佳视觉效果,避免物体干涉,同时,在镜头布置的过程中,需要防止现拍摄角度被场地内其他物体遮挡的可能性。本系统硬件价格低廉,软件开发投入最高,由于涉及硬件少,系统更新迭代较为简易。现场布置简易,精确度相对较低。
3.3 传感器技术
近半个多世纪以来,传感器技术突飞猛进,传感器技术的应用已经十分普及,同时,技术成熟,本系统各类传感器原件原理结构以及造价也相对低廉。在本系统应用中,需要对所有的物件进行改造,加设传感器以及信号发送设备。对考试过程还原基于传感器的信号接收实现,无法真实还原考试现场,同时,由于系统中涉及的元器件较多,并且在运行过程中存在按压、碰撞等情况,其中任何一个元器件出现损坏,就将导致系统无法正常运行,需要专人对系统内的元器件进行定期的检测、维护、保养。现场布置较为复杂,需要对所有定点停放点、标杆等器件进行改造以及布线等工作。本系统硬件价格适中,软件简易,现场布置相对复杂,对后期维护保养的要求较高,由于涉及的元器件较多,系统不易更新。
4 结语
本文针对桥门式起重机实际操作考试和流程入手,根据考试规则要求,提出三种不同无人化考评实现方式,以及初步的设计方案与利弊分析,相关的测试以及论证工作正在进一步展开。上述研究对桥门式起重机考试无人化实操考试系统在考试中有重要意义。
