直升机应急漂浮系统传感器模块可靠性分析
2020-08-28郭星孙建红李名琦马芳云孙智
郭星,孙建红,李名琦,马芳云,孙智
(1.南京航空航天大学 飞行器环境控制与生命保障工业和信息化部重点实验室, 南京 210016)(2.航空防护救生技术航空科技重点实验室, 襄阳 441003)
0 引 言
直升机应急漂浮系统(Helicopter Emergency Flotation System)作为直升机海上救生的主要装备之一,旨在为水上紧急迫降的直升机提供应急漂浮的能力,保障机内人员拥有足够的时间逃离出舱[1]。其应急漂浮入水启动控制组件的启动信号直接关系到应急漂浮控制器输出的安全与可靠。在紧急情况下,控制组件借助传感器模块判断直升机是否坠水,并发出驱动信号触发点火电路,使浮囊充气,从而及时为坠水直升机提供稳定的漂浮能力,保证应急漂浮和人员撤离。因此,控制组件中传感器模块的可靠性至关重要。
传统的可靠性分析方法主要包括:故障模式与影响分析(Failure Mode and Effects Analysis,简称FMEA)、蒙特卡罗模拟(Monte Carlo Simulation,简称MC)、故障树分析(Fault Tree Analysis,简称FTA)等。近年来,随着可靠性分析方法的不断发展与完善,可靠性分析已广泛应用于航空航天领域[2-4]。陈圣斌等[5]针对直升机可靠性分析,首次通过事件树将人员失误考虑在内,使直升机可靠性分析、计算更为完整,与实际使用更相符;E.Chung等[6]通过故障树模型来确定飞行构架是否能够满足系统需要的可靠性和安全性;李占营等[7]采用有限元法与蒙特卡罗法相结合的分析方法,对航空发动机空间管路系统的稳定性和可靠性进行了分析;李冰月等[8]针对飞机空调系统各主要部件进行了故障模式与影响分析,并结合FTA,对飞机空调系统故障进行了诊断实验,证明涡轮故障对座舱温度影响最大;冯志杰等[9]通过Matlab/Simulink等分析软件,在综合考虑某型飞机前起落架收起过程影响因素的基础上,结合蒙特卡罗法验证了机电液一体化系统模型的可靠性。但是,目前国内外有关直升机应急漂浮系统可靠性的研究较少,并且缺乏针对其关键部件——传感器模块的可靠性分析。
因此,为了分析直升机应急漂浮系统传感器模块的可靠性,在充分了解非同型单元k/n(G)表决系统的基础上,通过Matlab/Simulink软件,搭建不同逻辑关系下传感器模块的蒙特卡罗模拟平台,结合理论值,验证该方法的可行性与有效性,并对传感器模块的可靠性进行相关定性与定量分析;另外,基于功能危险性分析(Functional Hazard Assessment,简称FHA)相应结论,筛选出最佳的传感器模块逻辑关系。
1 直升机应急漂浮系统工作原理
直升机应急漂浮系统由三大组件构成,分别为控制组件(S1)、充气组件(S2)和浮筒组件(S3)[10]。双浮囊应急漂浮系统示意图如图 1所示,控制组件(S1)由控制板、控制盒和传感器等电子元器件组成;充气组件(S2)由气源装置和充气管路组成;浮筒组件(S3)由浮筒、连接机构和浮筒舱组成。
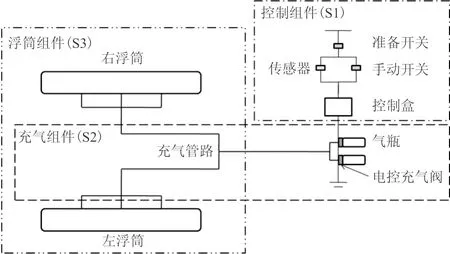
图1 直升机双浮囊应急漂浮系统示意图
从图1可以看出:各分系统之间为串联系统,即当各分系统都正常工作时,直升机应急漂浮系统才可完成任务。
其中,控制组件在系统中承担触发、点火功能,其可靠性框图如图2所示。为了提高控制组件的可靠性,确保点火电路安全触发,减少误触发概率,该分系统采用传感器模块与驾驶员并联的方式触发点火电路。同时,系统功能危险性分析表明,传感器模块的意外触发可能导致浮筒的非任务弹出,将对直升机的气动外型产生干扰,使飞机的安全性大幅降低,并危及人员安全。将该故障模式的影响等级确定为Ⅱ类(危险),对应的失效率为λ≤10-7。另一方面,控制组件中传感器模块为非同型单元k/n(G)表决系统,故本文在经典k/n(G)表决系统的基础上,将蒙特卡罗法应用于非同型单元k/n(G)表决系统的可靠性分析。

图2 控制组件可靠性框图
2 基于蒙特卡罗法的可靠性分析
2.1 k/n(G)表决系统

(1)
当零部件寿命分布服从指数分布,且失效率为常数λ时,则:
(2)
系统的平均寿命为
(3)
对于非同型单元k/n(G)表决系统,其由n个非同型单元组成,无法通过式(1)计算表决系统的可靠度,且存在工作状态组合爆炸的问题[12]。例如,2/4表决系统存在11种正常工作状态;2/5表决系统存在26种正常工作状态;2/6表决系统则存在57种正常工作状态。直接通过可靠度计算公式求解,计算过程繁琐易错,因此拟通过蒙特卡罗法对非同型单元k/n(G)表决系统的可靠性进行分析。
2.2 蒙特卡罗法
蒙特卡罗法又称统计模拟方法,它是以概率统计理论为基础的近似计算方法[13]。由Bernoulli定理可知,当样本容量足够大时,随机事件的概率可以用大量试验中该事件发生的频率来估算[14-15]。在实际工程应用中,通过对影响系统可靠度的随机变量进行大量的随机抽样,并将抽样值代入相对应的失效函数中,确定结构是否失效,多次计算后从中求得系统的可靠度。
通过Matlab/Simulink软件,结合k/n(G)表决系统逻辑关系,搭建MC仿真模型。利用各传感器寿命分布函数对每个底事件进行抽样,第i个传感器失效时间抽样值为
(4)
式中:η为(0,1)之间的随机数。
MC模拟流程如图3所示。采用直接抽样法,对k/n(G)表决系统的可靠度进行M次模拟,将各个传感器的抽样时间Ym(m=1,2,…,n)与给定的时间tm(m=1,2,…,n)进行比较,若Ym>tm,则该传感器在规定时间内可靠。累加得到tm时刻表决系统正常工作传感器的数目K,若正常工作的传感器数目大于等于k,则该表决系统可靠。从而得到在M次模拟中传感器可靠的数目N,k/n(G)表决系统的可靠度为N/M。
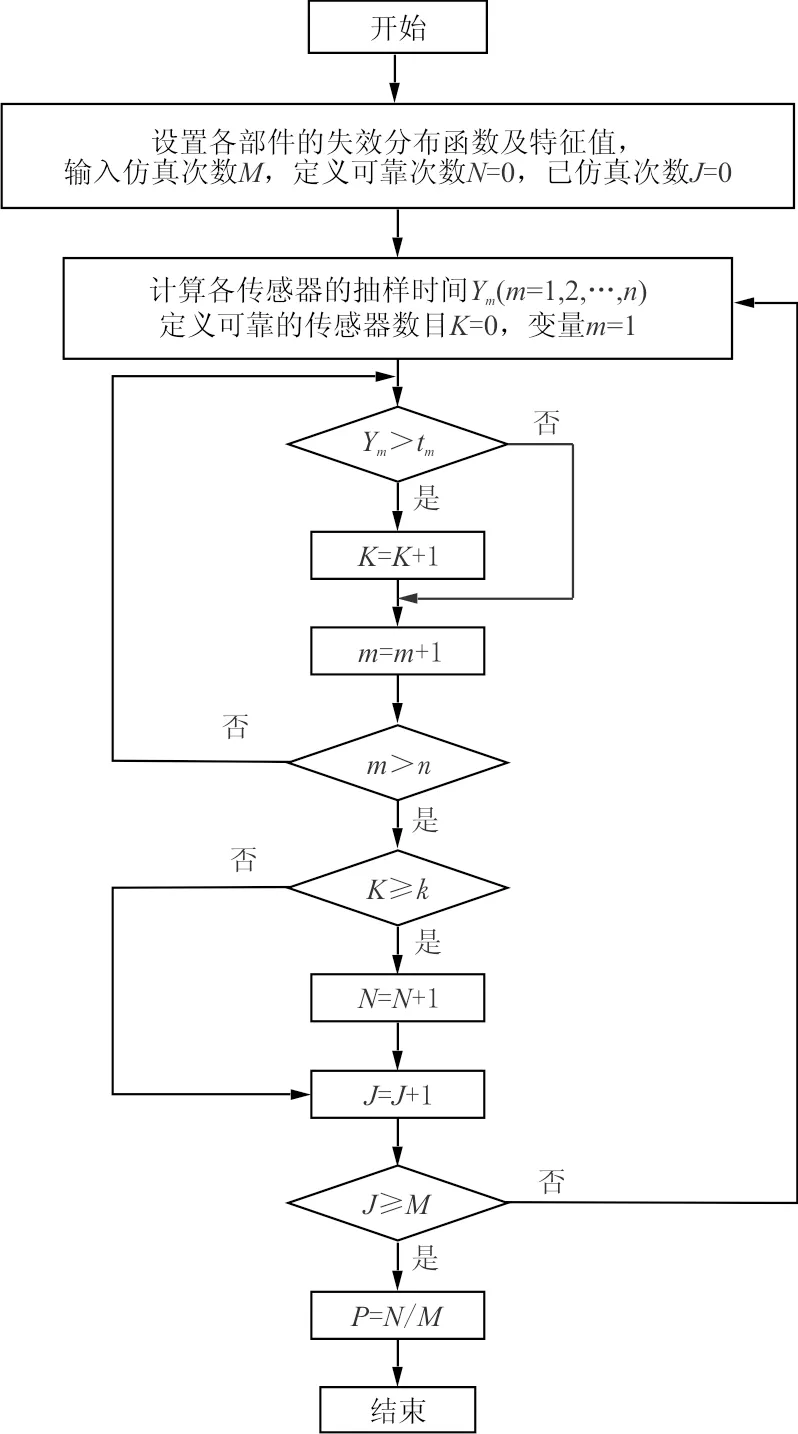
图3 MC模拟流程图
2.3 可靠性分析
通过蒙特卡罗模拟依次对非同型单元1/5、2/5、3/5、4/5与5/5表决系统的可靠度与误触发概率进行计算。3/5表决系统可靠性框图如图4所示,各传感器寿命均服从指数分布,失效率如表1所示[16]。

图4 3/5表决系统可靠性框图

编 号失效率编 号失效率15.2×10-646.8×10-625.2×10-651.2×10-636.8×10-6
依据3/5表决系统可靠性框图,通过Matlab/Simulink搭建MC模拟平台,如图5所示。在确定表决系统任务时间为10 000 h的基础上,对不同模拟次数(M)进行计算,结果如图6所示,可以看出:3/5表决系统的可靠度与误触发概率随着M的增加逐渐收敛,当M取值超过200 000时,仿真计算满足收敛要求。

图5 MC模拟平台
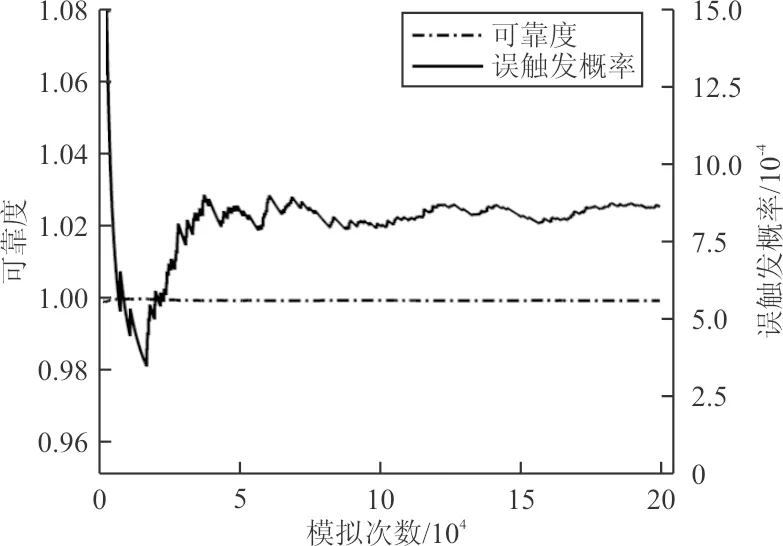
图6 3/5表决系统MC模拟结果
同理,通过MC模拟平台,获得1/5、2/5、4/5与5/5表决系统的可靠度与误触发概率收敛曲线,如图7所示,可以看出:在同一表决系统中,系统可靠度的量级高于误触发概率,因此计算结果的收敛与否以误触发概率为依据,且曲线收敛所需的模拟次数随着非同型单元k/n(G)表决中k值的增加而倍增,其原因是误触发概率的量级不同。值得注意的是,在5/5表决系统中,由于误触发概率近似为0,其所需的模拟次数以可靠度的收敛情况为依据。

(a) 1/5表决系统(b) 2/5表决系统(c) 4/5表决系统(d) 5/5表决系统
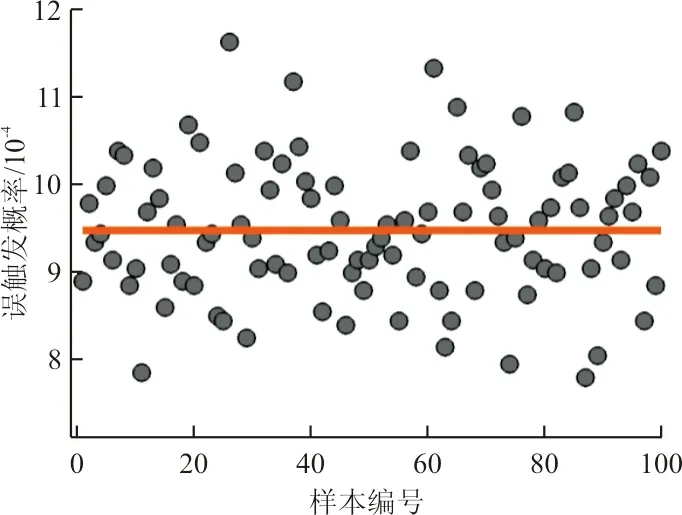
综合考虑计算能力及数据收敛情况,对不同表决系统的模拟次数(M)进行合理取值,并进行若干次重复计算。该样本空间共包含100组计算数据,部分数据如表2所示。

表2 样本空间
变量P35、F35的数据分布分别如图8~图9所示,可以看出:P35与F35集中分布在0.999 06与0.000 95两侧;对数据作进一步处理,得到频率分布直方图(Frequency Distribution Histogram,简称FDH)、均值(X)以及标准差(Y),如图8(b)和图9(b)所示,可以看出:各变量呈正态分布。

(a) 数据分布

(b) 频率分布直方图
(a) 数据分布
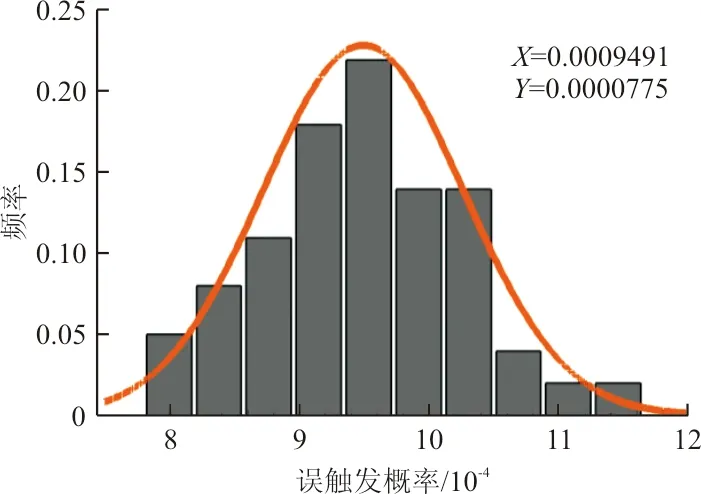
(b) 频率分布直方图
重复上述模拟流程,得到不同逻辑关系下传感器模块的可靠度与误触发概率模拟值。为了进一步说明该方法的有效性,对非同型单元3/5表决系统可靠度的理论计算做简单讨论。通过排列组合分析,非同型单元3/5表决系统共存在16种正常工作状态,且子部件寿命分布的差异导致无法通过式(1)对其可靠度进行直接计算,故将表决系统的可靠度计算公式展开,并依次带入子部件相应失效率,其计算过程如下:
R3/5=R1R2R3F4F5+R1R2R4F3F5+R1R2R5F3F4+R1R3R4F2F5+R1R3R5F2F4+R1R4R5F2F3+
R2R3R4F1F5+R2R3R5F1F4+R2R4R5F1F3+R3R4R5F1F2+R1R2R3R4F5+R1R2R3R5F4+
R1R2R4R5F3+R1R3R4R5F2+R2R3R4R5F1+R1R2R3R4R5=
e-(λ1+λ2+λ3)×104(1-e-λ4×104)(1-e-λ5×104)+…+e-(λ3+λ4+λ5)×104(1-e-λ1×104)(1-e-λ2×104)+
e-(λ1+λ2+λ3+λ4)×104(1-e-λ5×104)+…+e-(λ2+λ3+λ4+λ5)×104(1-e-λ1×104)+e-(λ1+λ2+λ3+λ4+λ5)×104=0.999 057 1
同理,通过上述方法依次得到不同逻辑关系下传感器模块的可靠度与误触发概率理论值,其与模拟值的对比如表3所示,可以看出:模拟值与理论值的最大相对误差为0.898 8%,其中5/5表决系统的误触发概率相比于1/5表决系统,相差6个量级,从而默认为极小量;另外,传感器模块所含部件寿命分布查表易得,技术路线经典可靠,因此蒙特卡罗法应用于传感器模块的可靠性分析具有一定的有效性与可行性。
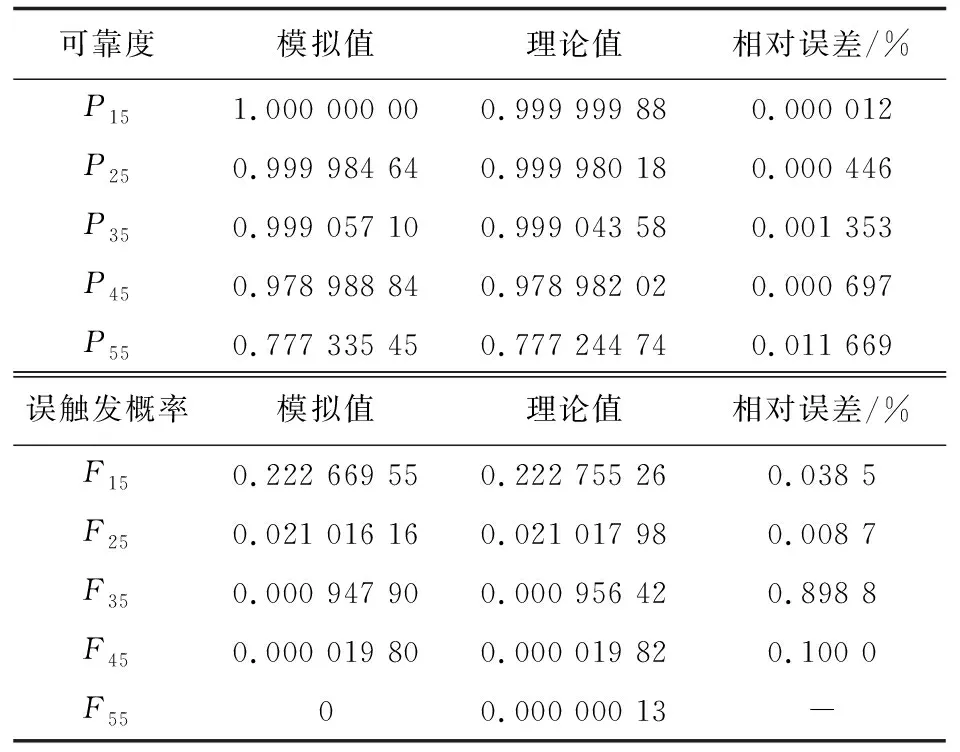
表3 模拟值与理论值对比
从表3可以看出:随着k值的递增,传感器模块可靠度呈现递减趋势,原因是满足表决系统逻辑要求的工作状态组合数目随着k值的递增而减少,其中P55数值的陡降是由于只包含一种工作状态(即所有部件均正常工作)引起的;同理,误触发概率呈现出递减趋势的原因与可靠度相同。另外,结合上述不同逻辑关系下传感器模块可靠度与误触发概率计算结果,发现仅3/5表决系统满足直升机应急漂浮系统功能危险性分析的定量要求(λ≤10-7),从而该传感器模块选择3/5表决系统最为合适。
3 结 论
(1) 通过模拟值与理论值的对比,表明将蒙特卡罗法应用于传感器模块的可靠性分析具有一定的可行性与有效性。解决了非同型单元k/n(G)表决系统工作状态组合爆炸、计算过程繁琐易错的问题。
(2) 依据可靠度与误触发概率的计算结果,发现其值均随k值的递增呈现递减趋势,原因是满足相应逻辑要求的工作状态组合数目随着k值的递增而减少。结合功能危险性分析的相应结论,该直升机应急漂浮系统传感器模块选择3/5表决系统最为合适。研究结果可为后续相似模块的逻辑关系选择与可靠性设计提供技术路线。
