基于轮廓重合度分析的道路标记鲁棒识别
2020-08-26陈家成肖晓明黄余唐琎耿耀君
陈家成,肖晓明,黄余,唐琎,耿耀君
(1.西北农林科技大学信息工程学院,陕西杨凌,712100;2.中南大学自动化学院,湖南长沙,410083)
随着人工智能的兴起,无人驾驶技术已经成为企业和学者的研究热点。无人驾驶汽车依靠计算机视觉提供必要的交通信息[1-2],识别公路编码道路标记是必要的组成部分[3]。道路识别对人类驾驶员来说是一项简单的任务,但对计算机来说并非易事。道路交通的复杂性、不同的街道照明、能见度和不同的天气状况常常会降低道路标记的图像质量。非目标干扰如积水、阴影、行人、车辆和路边灌木丛等会使识别道路标记变得复杂。如果这些非目标干扰在预处理过程中不能有效去除,将会导致道路标记识别出现误报,影响道路标记识别算法的整体性能。此外,由于道路标记种类繁多,仅使用单一的特征描述符方法很难准确区分,也很难区分阴性样本(如积水、树的阴影)[4-5],因此,在复杂的交通条件下,有必要结合多种特征对道路标记进行有效识别。目前,人们对路面车道标记检测的研究较多[6-7],但对道路标记识别的研究较少。为了识别道路交通标记,许多方法依赖于车道位置[8]的检测结果。因此,车道检测的准确性会对其他道路标记的识别产生很大影响。WU 等[9]指出了该方法的不足,提出了一种独立的道路标记检测与识别算法。该方法提取多个ROIs作为最大稳定极值区域(MSER)[10],然后,使用快速特征[11]和方向梯度直方图(HOG)[12]特征作为描述符,为每个类构建模板。这种方法严重依赖于快速检测的准确性,并且数据量巨大的HOG 特征也需要大量的计算量。REBUT等[4]提出了一种识别4类箭头和线性标记的方法。他们使用霍夫变换来检测线性标记,并使用1 个k 近邻(KNN)[13]分类器与傅里叶描述符来标记其他道路标记。WANG等[14]提出了一种基于先验知识和图像匹配的道路标记检测与识别方法。GANG等[15]从重建图像中得到4个改进的Hu矩阵和2个仿射不变矩阵,然后使用SVM 分类器进行最终识别。这些方法操作简单,实时性好,在理想路况下取得了良好的效果。然而,在轻度和严重退化的道路条件下,该方法识别准确率低,假阳性率高。KHEYROLLAHI 等[16]提出了一种先进行反向透视变换,然后利用自适应阈值分割算法获得二值图像的算法。该算法利用连通域的方法提取道路标线对应的目标区域,并在尺度和方向上进行校正。最后,提取候选目标的Hu 矩阵、直方图、纵横比等118 维特征,并与单隐层人工神经网络(ANN)分类器相结合进行特征识别。该方法对特定标记的识别率较高,但对某些道路标记(如分岔箭头等)的识别率较低(75.5%)。此外,提取的特征维数高,采用人工神经网络进行分类,计算量大。ZHANG 等[5]提出了一种利用霍夫变换检测路面车道线并建立感兴趣区域(ROI)的算法,然后进行一维熵分割和边缘检测,提取改进后的Hu矩阵不变特征进行识别。然而,该方法仅使用一种描述特征,因此,存在一定的局限性。此外,还有一些研究者使用深度学习来对道路标记进行分类。AHMAD等[17]使用不同数量的卷积/池化操作和全连通层以及不同分辨率的道路标记数据集来训练5 种不同的CNN 架构。这2种方法只实现了对路标的识别而没有检测,不能直接应用到实际情况中。更重要的是,这些深度神经网络需要大量的训练样本和价格昂贵的图形处理硬件来支持其庞大的计算负载,因此,很难将其应用于嵌入式高级辅助驾驶系统和商业化。上述方法为道路标记识别提供了广阔的应用前景。虽然个别算法分类样本的准确率很高(>99%),但其综合检测和识别性能还没有达到要求,这主要是实际道路环境中水、影、车、路边草等复杂条件的干扰因素造成的。若这些非目标干扰在预处理阶段不能有效去除,则分类器就很难正确区分负样本,因此,在识别结果中存在许多误报,导致分类器性能较低。在实际无人系统中,如果1个算法的结果含有大量误报,将严重影响高层决策算法的运行,使无人系统失效。为了解决上述问题,本文作者提出一种基于轮廓重合分析的非目标干扰滤波算法,可有效滤除道路标记识别预处理阶段的大部分干扰,降低道路标记识别错误的风险。同时,改进轮廓特征分析方法,并将其与基于椭圆傅里叶描述子的SVM 相结合。这种提取和融合多种特征的方法可以更准确地对道路标记进行分类[8]。
1 算法原理
本文提出的整个道路标线识别算法是基于IPM和非目标滤波器的道路标线鲁棒识别算法。具体步骤如下:1)使用逆透视映射将原始图像转换为俯视图像;2) 从顶视图图像中提取边缘图像和Canny 图像;3) 对上述2 种图像比较结果进行分析,滤除干扰,得到过滤后的图像;4)对过滤后的图像进行形状处理和几何滤波;5)对步骤4)所得结果使用2种方法进行处理,其中,一种是通过轮廓特征分析计算道路标线模板与图像中目标的相似度,另一种是计算图像中目标的椭圆傅里叶描述子并将其用于支持向量机的训练;6)将轮廓分析和支持向量机的2个结果进行融合,得到最终的分类结果。该算法的总体框架图如图1所示。
1.1 逆透视映射
由于车辆摄像机以斜角(称为原始图像)捕获道路图像,因此,在所获取的图像中存在失真情况,在原始图像上很难直接检测和识别道路上的交通标记。为此,首先使用IPM算法[19]将原始图像转换为俯视图像,然后限制转换后图像的长和宽,只留下有用的区域,如图2所示。
1.2 结合Canny的阈值分割
为了获得感兴趣区域的边缘,首先将彩色图像转换成灰度图像,然后使用Canny边缘检测器提取图像的边缘。
由于获取的道路图像失真,在一定距离处道路图像的清晰度略低于近点的清晰度,从而导致逆透视变换后顶视图图像的上半部分分辨率略低,因此,首先将俯视图分成上、下2部分,然后使用邻域块参数为S1和S2的自适应阈值分割算法(OSTU)[20]进行分割,并将分割结果进行合并。
由于上一个分割仍然包含许多孤立面片,以及由于光照效果不佳而没有很好分割的区域,故将此结果与Canny边缘检测相结合并进行第2个分割。首先,对第1个分割的每个连接域进行轮廓搜索,并找到相应的边界矩形。其次,设置面积阈值Sth和外接矩形面积Srec,若Srec<Sth,则进行第2次分割;否则,将该区域划分为等距块,然后进行第2次分割。第2个分段计算式如下:

其中:Crec为对应于矩形灰度图像区域的矩阵;Cth为设置的Canny 边缘像素阀值;Ci,j为该区域中的像素。使用式(1)计算矩形区域内Canny 边缘像素的总数Csum,若Csum≤Cth,则参考式(2)将连接区域内的所有像素Ai,j设置为0;否则,使用邻域块参数为S3的自适应阈值分割算法(OSTU)[20]对矩形区域中的灰度图像区域Crec进行二值化,以生成俯视图像的普通二值化图像Ibin。
1.3 色彩过滤
由于道路标线以白色、黄色和红色为主,利用颜色信息可以初步滤除道路上的路边树木、草地和色彩鲜艳的车辆等干扰。首先,将彩色顶视图图像从RGB空间转换到HSV空间,得到其饱和度S、亮度V 和灰度图像灰度G。然后,创建1 个新的灰度图像Imask,其长和宽与俯视图的相同,定义如下:

图1 基于IPM和非目标滤波器的道路标线鲁棒识别算法框图Fig.1 Frame diagram of robust recognition algorithm of road markings with IPM and nontarget filter

图2 逆透视映射算法得到的俯视图示例图Fig.2 An example of a top view image from inverse perspective mapping algorithm

其中“∧”表示“并且”。式(3)用于基于颜色信息和灰度选择满足条件的遮罩区域,其中,阈值43,46和40是由实验确定的。
使用第1.2节中描述的方法获得二值图像Ibin中连接区域的轮廓,并确定每个轮廓的边界矩形。每个矩阵使用

来计算掩模图像Imask在相应矩形区域中的非零点数Cyes。其中,Mrec为图像Imask中的相应矩阵;Mi,j为坐标(i,j)的像素。若Cyes大于图像Ibin中矩形区域的总非零点的一半,则认为该区域包含过多的颜色像素,并且过滤掉图像Ibin中的轮廓区域;否则,保留Ibin图像中的轮廓区域。
1.4 轮廓与Canny边缘的重合分析
现有的道路标线识别方法大多对道路分割结果进行简单几何滤波,提取图像区域中的目标特征,然后进行特征匹配和分类[4-5]。当感兴趣的范围小或道路环境简单时,采用该方法可取得较好的效果。但是,当感兴趣的范围较大(如车辆纵轴方向32 m,道路场景宽度18 m)或道路环境复杂时,仅通过目标大小、纵横比、形状特征等信息很难滤除非目标干扰,导致误报率高,稳健性差。
经过IPM 变换后,原始路面上的非平行车道线在俯视图中变得平行,俯视图中的道路标线也变得更加规则。但是,在俯视图中,原始图像中具有一定高度的非目标(如前车、行人、路边草、围栏等)会被拉伸变形,这将使顶视图像中非目标干扰的轮廓模糊,但路面上的交通标记不会受到影响,因为它们没有高度。因此,Canny边缘图像与轮廓图像在道路标线和非目标干扰的重合度上存在较大差异,即顶视图中道路标线的边缘和轮廓重合度较高。相反,非目标干扰符合度低,如图3 所示。其中,图3(a)中的非平行车道在图3(b)中变为平行车道。与图3(a)相比,图3(b),图3(c)和图3(d)中的目标(道路标记)变得更加规则,非目标(车辆、草地和围栏)在图3(c)和图3(d)之间表现出很大差异。图3(c)和图3(d)中的目标区域很匹配,而非目标区域则不匹配。
基于上述特点,提出以下非目标干扰滤波算法。
第1步,遍历轮廓图像中的每个轮廓,然后顺时针扫描轮廓上的点,以确定轮廓与边缘图像重叠的最长长度Lmax。计算Rmax,即Lmax与轮廓总长度Lcontour之比:

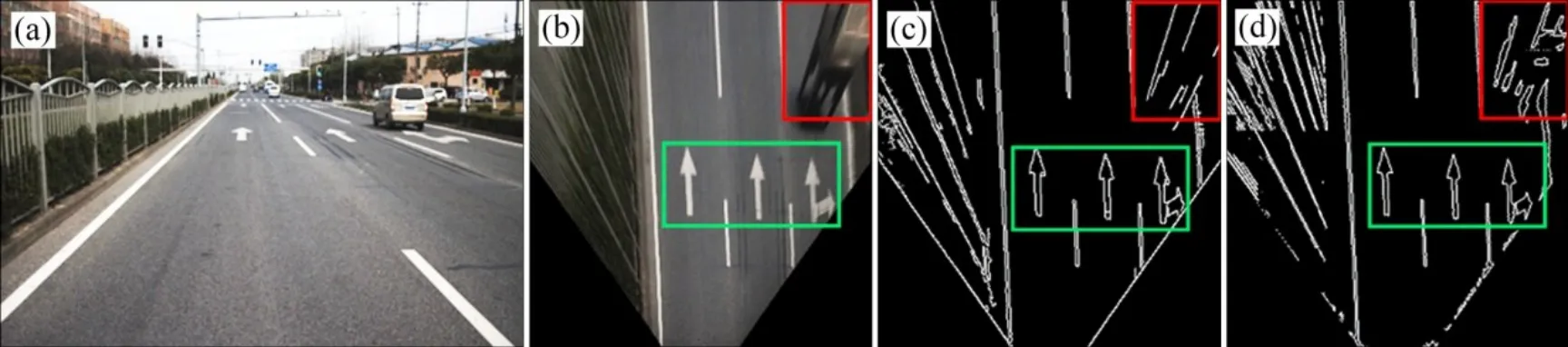
图3 Canny边缘与俯视图像中轮廓的比较Fig.3 Comparison between Canny edge and the contour in the top view image
第2 步,经实验设置高阈值RH和低阈值RL;若Rmax<RL,则将轮廓点视为路面区域的像素点,并保留相应的轮廓区域;若RH<Rmax,则将轮廓点视为非路面的立体干扰物的区域的像素点,并过滤该轮廓点;若RL<R<RH,则继续执行下一步。
第3步,确定包围点链Lmax的最小矩阵Rin,并在Rin的基础上向上、下、左、右4个方向扩展5个像素,得到更大的矩阵Rout。若在展开过程中遇到图像的边界,则停止沿该边界方向展开。分别确定Rin和(Rout-Rin)区域灰度图像的平均灰度Vin和Vout。若Vdelta=|Vin-Vout|>25,则表示内部和外部灰度之间的差异显著,保留轮廓区域,否则丢弃。
使用收集到的20 000 多幅道路图像进行非目标滤波实验,发现非目标过滤后的非目标区域仅占原来二值化后的18.72%。这意味着在普通二值化基础上,非目标滤波可以进一步去除81.28%的非目标干扰。
不同道路场景的非目标滤波结果如图4 所示。其中,图4中每个分图从左到右依次为原始二值化结果、非目标滤波结果和最终测试结果。需注意的是,每个分图中的中心图像都显示了与最左图像相比的过滤结果,最左图像中的大多数非目标都已被过滤掉。可见在不同的复杂环境下,非目标滤波算法有效地去除了大部分干扰,滤波结果与二值化结果相比有了较大改善。
1.5 形态处理与几何滤波
如1.4节所述,去除二值图像中的非目标干扰后,在检测和识别道路标记时,处理时间和错误检测率降低。然而,检测到的道路标记有一些缺损,如破损或凹陷的标线,因此,在特征提取之前,有必要对一些形状进行处理,即扩填后再减缩,以减少标记缺损,如图5所示。
对边界矩形进行面积滤波和纵横比滤波。遍历所有剩余的轮廓,并计算外接矩形的面积Arec和纵横比Rrec,保留满足以下规则的轮廓区域:

通过对采集到的所有图像进行计数,并记录俯视图中道路标记的Arec最小值Amin和最大值Amax,以及俯视图中道路标记的Rrec最小值Rmin和最大值Rmax,通过实验确定面积和纵横比的上下限。为了提高算法的适应性,将得到的最小值减少20%,最大值增加20%。
1.6 轮廓特征分析与分类
为了区分不同的道路标线,轮廓描述子需要在不同的道路标线类型之间具有很高的相似性,并且在相同的道路标线类型之间具有很高的相似性,同时还需要具有平移、旋转和缩放不变性。
在文献[21]中,利用轮廓形状描述子来表示人体轮廓的形状特征,并与视频序列特征相匹配,实现步态识别。该描述子根据人体关节的高度在人体轮廓上分布28 个标记点,每个标记点到轮廓中心的距离构成28 维特征向量。地标点的分布假定不同人群的相对关节位置相同。
不同道路标线的形状不同,因此,提出一种新的路标选择方法,如图6 所示(其中,Din为最内侧交点距离中心点的距离,Dout为最外侧交点距离中心点的距离)。

图4 不同道路场景的非目标滤波结果Fig.4 Non-target filtering results of different road scenes

图5 形态处理Fig.5 Morphology processing
该方法首先提取所有道路标记模板的轮廓,将其高度归一化为最高高度,并保持纵横比不变。从轮廓的几何中心(O)开始,以规则间隔发出18条射线(如图6(a)所示)。记录每条射线与轮廓之间的内外交点(见图6(b))。若每条射线有2 个以上的交点,则只保留最内侧点和最外侧交点。若射线没有交点,则该射线对应的内、外距离均设置为0。若几何中心于轮廓内,则该射线对应的内部相交距离设置为0,交叉点用作轮廓标记点。这里的距离是欧几里德距离。因此,使用k×d维矩阵来表征道路标记的每个轮廓,其中,k=18表示每个轮廓使用的射线数为18,d=2表示交点的个数为2。要使矩阵对平移、旋转和缩放保持不变,需要执行如下步骤。
1)将模板轮廓和实际道路标记轮廓(分别为MT和MR)的形状矩阵中心化:

其中:中心矩阵C = Ik-(1/k)1k1Tk;Ik为1 个k×k的单位矩阵;1k是值均为1的k维向量。
2)将中心真实道路标记矩阵MRc进行变换、旋转和缩放,得到中间矩阵MY:

其中:β ∈ℝ+,为比例因子;Γ 为d×d 维正交旋转矩阵;γ 为1 个(d × 1)转置的d 维向量;相似参数因子β,Γ和γ通过最小化矩阵MTc和MY之间的欧氏距离得到,即最小化

来得到MY。
3)使用以下公式计算模板轮廓与实际道路标线轮廓之间的相似度SCSA:
其中:A 为模板矩阵MTc的每个维度的平均值的行向量。SCSA的范围为[0,1],表示2 个轮廓之间的相似性,其值越小,则表示2 个轮廓之间的相似度越小。
在实验中,使用式(10)比较提取的轮廓与每种模板的轮廓的相似度,然后,根据相似度等级对它们进行排序,从而实现道路标线的分类。
1.7 椭圆傅里叶描述子的特征提取与分类
椭圆傅里叶描述子[22]比传统的傅里叶描述子更适合描述复杂的单闭合轮廓,具有更高的描述精度和更少的系数,它对平移、旋转和缩放具有不变性,对轮廓起点不敏感。

图6 标记点采集方法示例图Fig.6 An example diagram of the marking point acquisition
本文随机选取轮廓上的1 个点(x0,y0)作为起点,沿轮廓逆时针方向遍历,直至到达原点。在此期间遇到的点集记录为(x1,y1),(x2,y2),…,(xN-1,yN-1)。把这些点集看作一个复杂的序列s(t),即

其中:t=0,1,2,…,N-1。Fourier 级数在轮廓的(x,y)方向展开如下:

其中:

使用以下方法得到对平移、旋转和缩放不变的椭圆傅里叶描述子:

式中:E 表示提取到的椭圆傅里叶描述子(EFD)。由于低频EFD 能表征轮廓的宏观特征,而高频EFD 能表征轮廓易受噪声影响的细节,因此,仅选择前36 个系数作为轮廓的椭圆傅里叶描述子。这些数据被传递给经过训练的SVM[23]进行分类。
1.8 结果融合
由于道路交通环境的复杂性,不能保证提取的目标都是道路标线,并且可能存在少量的非目标干扰。因此,为了提高算法的鲁棒性,使用以下简单的规则来融合这2个分类结果:

其中:RSVM为支持向量机分类的结果;RCPA1和RCPA2分别为轮廓特征分析的前2 个分类结果;Rfinal为最终结果。融合方法首先对轮廓特征分析的结果进行排序,然后确定支持向量机分类的结果是否在轮廓特征分析的前2个结果内。若是,则确认目标为道路标线,并将SVM 分类结果作为最终结果;否则,将提取的目标视为干扰。该融合方法提高了识别结果的可靠性,降低了误报率。
1.9 目标定位及误差补偿
为了满足无人驾驶汽车的要求,不仅需要确认正确的道路标记类型,而且需要知道它们的确切位置。根据第3节中的逆透视算法,将实际的感兴趣的区域设置为车辆前方0~32 m,从左到右的距离为18 m;在俯视图中,将水平和垂直方向上每个像素表示的实际物理距离分别设置为σx=8 cm和σy=5 cm。因此,逆透视变换后的俯视图长×宽为w×h=360 像素×400 像素。然后,对于俯视图中的每个像素(xm,ym),车辆坐标系中相应的实际位置(Xreal,Yreal)由以下公式给出:
其中:d和l为补偿值。获取(Xreal,Yreal)后,从顶视图图像到原始图像的映射由IPM[19]给出。类似地,当俯视图中道路标记的坐标已知时,由式(16)给出车辆坐标系中的实际位置。
为了分析定位误差,将实验车辆开到道路标线的后部,使车辆前部垂直于标线的下边缘。然后,让算法自动识别道路标线,并在计算机显示器上实时输出标线的位置坐标(Xreal,Yreal)。然后选择标记识别框的左下角作为参考点,并使用标尺测量其实际坐标。每次记录后,倒车1~2 m,直到32 m左右。
由于摄像机标定参数的误差,在识别距离内的道路标线时可能存在较大的定位误差,因此,使用最小二乘法对算法的测量结果和误差进行多项式拟合。最后,算法的位置输出是原始测量值加上补偿值d和l的结果。
2 结果与讨论
使用车载相机拍摄了我国长沙、上海和苏州的城市交通,总共获得29 850 张图像,其中包括1 032张带有道路标记的图像。对原始视频(30帧/s)进行截图采样,生成图像数据集。图像采集是在晴天、多云和小雨天气以及正常、磨损和其他道路条件下进行的。
实验中使用8 种常见的道路标记,如图7所示。
图8 所示为所提出的算法所涉及的各种过程。该算法的输出包含标记的类型及其在车辆坐标系中的位置,其中,图8(f)所示为过滤掉图8(b)中非目标区域的结果,可以发现干扰基本上被过滤了。

图7 8种常见的道路标记Fig.7 8 types of common road markings

图8 算法的检测与识别过程Fig.8 Detection and recognition processes of algorithm
2.1 检测和识别结果分析
为了比较非目标滤波算法对最终检测和识别结果的影响,分别进行2组实验来确定是否使用非目标滤波算法。这2个实验的实验条件除了1个有非目标滤波算法和1 个没有非目标滤波算法之外,其他均相同。实验结果如表1所示。表1中,一些重要参数说明如下:对于路况,若路面标记磨损率小于15%,且主要特征信息不受影响,则表示路况正常,否则为磨损(极其肮脏的路面也视为磨损)。在天气变量中,“√”表示测试集中包含该天气条件的对应类别的图像,“×”表示测试集中不包含该天气条件的对应类别的图像。
从表1可见:当路面磨损或变脏时,算法的召回率降低,这会导致目标在二值化过程中被误认为是背景,从而导致最终检测和分类失败。其中,FP为将正样本误识别为负样本的数量,即未正确识别出来的标记数。
由实验统计结果可以发现:非目标滤波算法的使用对误报数量产生了很大影响,误报总数由2 036 个减少到268 个,整体识别准确率由90.90%提高到98.69%。但非目标滤波算法对召回率的影响很小,总召回率仅从94.31%下降到94.02%,说明非目标滤波算法几乎不会误滤出真实道路标记。此外,非目标滤波的使用显著提高了算法的整体性能,精确率和召回率的调和平均数F1从92.57%提高到96.30%。
不同天气条件下的识别准确率、召回率和F1如图9所示。从图9可见:在多云情况下,道路上没有强烈的阴影和反光效果,准确率、召回率和F1都接近98%;然而,在阳光充足的条件下,路边的树木会对道路产生大量的强烈阴影,干扰目标检测,导致算法精度下降;在小雨条件下,环境的照度较低,潮湿的路面上有反射,可能导致目标检测失败,召回率低。虽然恶劣的天气会对算法产生一定的影响,但算法整体性能良好,F1保持在92%以上,说明算法具有良好的鲁棒性。

表1 道路标记检测与识别统计结果Table 1 Statistical results of detection and recognition of road markings

图9 不同天气条件下的识别准确率、召回率和F1Fig.9 Identification accuracy,recall rate and F1 under different weather conditions
2.2 与其他算法的比较
为了比较不同算法的性能,将文献[5-6,14-18]中的算法和本文算法的实验结果进行比较,如表2所示。
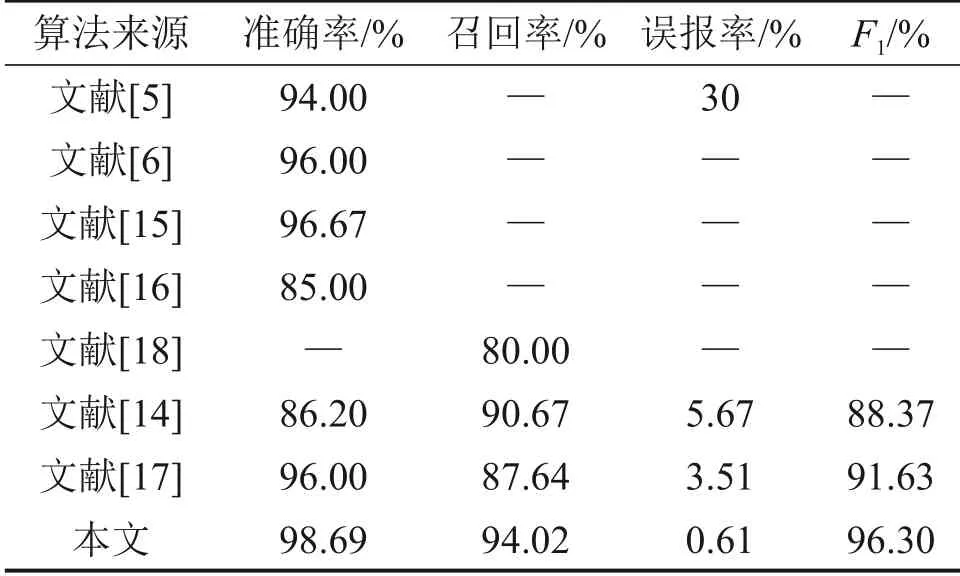
表2 不同算法的识别性能Table 2 Recognition results of different algorithms
从表2 可以看出,本文算法与其他算法相比,召回率高,精确率和召回率的调和平均数F1高,误报率低。
另外,本文算法是基于俯视图进行检测和识别,确保目标矩形内不会有车道或其他干扰迹象。然而,文献[14,16]中的方法直接从原始图像中检测和裁剪目标,这可能导致目标检测框包含其他干扰,从而导致识别错误。
通过比较发现:文献[5,14]中的方法在检测前并没有很好地滤除非目标干扰,在检测和识别的后期也不能完全滤除干扰,导致误报率较高。
在本文算法中,经过二值化后,首先使用非目标滤波算法滤除大部分干扰,然后在识别后期使用2种不同的特征描述道路标线轮廓,并融合它们的结果,保证了系统的识别精度高,误报率低。
各种路况的道路标记检测与识别的结果如图10 所示。从图10 可见:检测和识别道路标记的视觉结果较好,它在绝大多数复杂的道路场景下都保持了良好的性能。但由于信息不足,很脏的道路可能会导致识别失败。
2.3 目标定位及误差补偿结果
图11 所示为补偿前后算法测量距离输出与误差比较。其中,图11(a)和图11(b)中的横坐标为使用标尺测量的实际距离,图11(a)中纵坐标为算法的测量距离,图11(b)中纵坐标为测量距离误差。
由图11 可见:近距离(<15 m)算法测量误差小于30 cm,在一定距离内最大误差可达1.11 m,但采用非线性补偿算法后,无论实际距离多长,误差均保持在30 cm以内,保证了无人驾驶系统对道路标线的精确定位。
2.4 实时性能分析
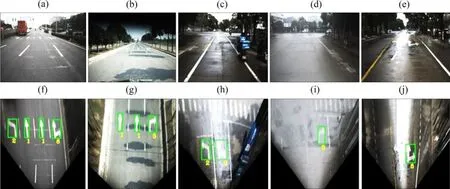
图10 各种路况的道路标记检测与识别的结果Fig.10 Examples of various road marking detections and recognition results colored with green box

图11 补偿前后算法输出与误差比较Fig.11 Comparison of output and error before and after compensation
标准化组织3GPP定义了几个低延迟场景,主要集中在自动驾驶上。自动驾驶制动反应时间是系统响应时间,包括网络云计算和车间协商处理时间,以及车辆系统计算和制动处理时间。若速度为100 km/h 的制动距离不超过 30 m,则系统的整体响应时间不能超过10 ms,而最好的F1赛车手的响应时间大约为100 ms。
道路标记识别系统的硬件平台为Advantech ARK-3500 IPC, Intel (R) Core i7-3610QE CPU @2.3GHz, 15.76G RAM,使用的编程语言为C++。共使用分辨率为1 920 像素×1 200 像素的29 850 幅彩色图像,对道路标线进行检测和识别。识别系统各阶段的平均运行时间见表3。
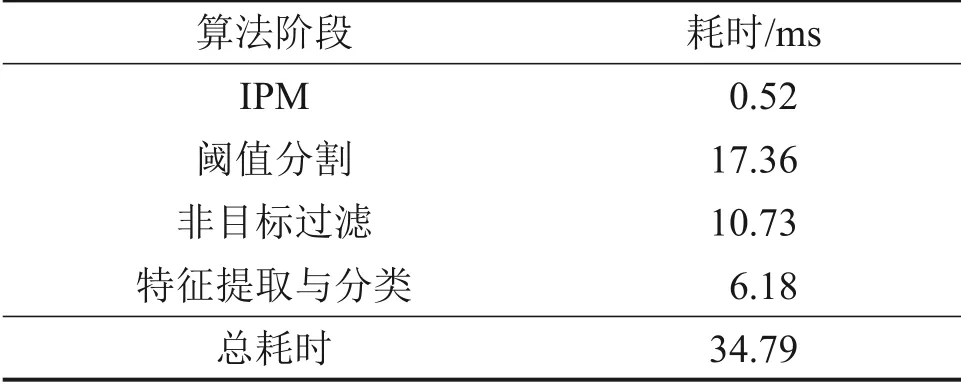
表3 各阶段算法运行时间Table 3 Time of algorithm running at each stage
3 结论
1)提出了一种基于轮廓重合度分析的道路标记识别算法,该算法在不同光照、天气、道路等交通环境条件下保持了良好的检测和识别性能。提出的非目标滤波算法有效地滤除了普通二值图像中81%以上的干扰,并将轮廓分析结果与基于EFDs 的支持向量机识别结果相结合,对最终结果进行了改进。该算法的最终召回率以及精确率和召回率的调和平均数F1较高,误报率较低。
2)本文提出的道路标线识别算法可以在未来应用于无人驾驶场景。道路标线可以为道路上行驶的车辆提供预告性的信息,对无人驾驶系统得出正确的反应策略具有重要作用。因此,及时、准确地识别出车辆前方的道路标线,可以为无人驾驶技术提供关键、可靠的道路信息。特别地,在地图信息的通信信号质量不佳的情况下,道路标记提供的信息显得尤为重要。
3)提出的定位补偿算法有效地提高了道路标线检测的精度,可以满足无人驾驶技术对道路标线检测精度的要求。
本文研究还存在一些不足,如:该算法只能用于白天的道路轮廓分析和道路标记识别,不能用于夜晚的道路轮廓分析和道路标记识别。其次,该算法只能识别几种常见的国际道路标记,而不能全部识别。未来的工作核心将聚焦于扩展训练数据集类别,增加算法能识别的道路标记种类,使算法功能更全面。其次,需要研究适合夜晚场景下的道路标记识别算法,并进行针对性分类训练和实验。
