磁钉导航在AGV中的应用
2020-08-25孙鹏飞
孙鹏飞
(沈阳新松机器人自动化股份有限公司,辽宁 沈阳 110168)
0 引言
AGV(Automated Guided Vehicle,即自动导引车)在仓储物流领域有着广泛的应用,其应用环境一般是无人化或少人化,靠自身导航系统实现AGV的自动行走。在所有的导航方式中磁导航形式是最常见的,但在磁导航技术的应用中,磁条导航形式是最多见的,磁钉导航形式又是少见的,为此,本文着重探讨磁钉导航技术在AGV中的应用。
1 磁钉导航应用场景
磁导航具有很高的测量精度及良好的重复性,不易受光线变化等的影响,系统具有很高的可靠性和鲁棒性。常见的磁导航技术有磁条导航技术与磁钉导航技术,磁条导航技术一旦磁条铺设好后,维护费用非常低,使用寿命长,且增设、变更路径都较容易,因此应用也最广泛,但在某些场合更适宜于采用磁钉导航技术,尤其有两种场合更应首先考虑磁钉导航技术:①AGV运行环线路径较长的环境;②户外环境。此两种情况运行路径都比较长,甚至长达几千米,且路径存在无法避开的交叉点,在AGV交叉行走时会碾压损坏路面铺设的磁条等,因此为降低成本,便于施工,基于性价比的角度考虑,需采用磁钉导航技术。
磁钉导航和磁条导航一样,都需要磁传感器来定位AGV相对于路径的左、右偏差。磁传感器中有若干磁阻传感器探测点,例如I/O输出的磁传感器,对应磁场强度高处的探测点,一般有1个~3个探测点所对应的I/O数据信号输出低电平,而对应磁场强度近似为0的低处的探测点所对应的I/O数据信号输出系统电压,由此便可判断出磁钉相对于磁传感器的偏离位置。磁传感器探测原理如图1所示。
磁钉导航的媒介磁场信息为磁钉,磁钉的铺设为离散预埋铺设在地表下,不像磁条一样连续铺设,因此考虑到可操作性和维护性,一般相邻两个磁钉的间距在1 m以上。磁钉导航通过磁传感器检测磁钉的磁信号来寻找行进路径,将原来采用磁条导航时对磁条进行的连续感应变成对磁钉的间歇性感应,因此磁钉之间的距离不能过大,且两磁钉间AGV处于一种距离计量的状态,在该状态下编码器计量所行走的距离。除此之外,磁钉导航所用控制模块与磁条导航所用的控制模块相同。

图1 磁传感器探测原理
2 磁钉导航原理
由于磁钉离散铺设于地表下,且有一定的相隔间距,这样AGV在行走过程中磁钉与磁钉之间会失去导航信息,也就是会在磁钉与磁钉之间产生盲区,在没有导航信息的盲区运行是不可预料和不安全的,因此磁钉导航需要采用角度传感器来为AGV提供航向角度参考,以便在盲区环境中提高AGV的导航精度,引导AGV在磁钉之间正常运行。这种磁钉离散布置配套角度传感器的导航方式也称为惯性导航。
通常把在AGV上安装的陀螺仪用作角度传感器,通过陀螺仪测量载体在惯性参考系下的加速度,自动进行积分运算,获得载体的速度、偏航角和位置等信息。假设陀螺仪得到角速度为R,通过角速度对时间t积分便可得到累积的角度偏差值J,即:
(1)
AGV通过对陀螺仪偏差信号的计算,不断将偏差值J反馈给控制器,控制AGV保持正确航向姿态,基本上可以满足一般场合AGV的使用要求。
陀螺仪角度传感器会随时间的累积产生误差,在某些需要精确控制AGV姿态或磁钉间距比较大的场合,需要对误差进行修正。例如在AGV中增加一个校准的辅助磁传感器,在原地面导航磁钉对应辅助磁传感器的位置预置辅助磁钉,配合AGV车体及时进行纠偏,以保证导航系统的精度及可靠性,使AGV系统按预定轨迹运行。角度修正示意图如图2所示。

图2 角度修正示意图
AGV小车实际的航向角为α1,角度传感器输出的航向角为α2,磁传感器输出偏距为L1,辅助磁传感器输出偏距为L2,则有:
(2)
显然此时角度传感器的误差α为:
α=α1-α2.
(3)
将累积误差反馈给AGV控制器,从而将角度传感器的误差消除,为AGV接下来的行进提供相对准确的导航,避免因角度误差积累而导致AGV跑偏。
3 磁钉导航方案设计
AGV的导航控制实质上就是AGV不断纠正自己的姿态与理想值不断趋近的过程。按磁钉导航方案,AGV的VCU(车体控制器,Vehicle Control Unit)在得到AGV导航偏差后通过CAN总线将执行命令传输给MCU(运动控制器,Motion Control Unit),MCU依靠增量式编码器信号的反馈输入对伺服驱动器进行精确控制,从而通过控制调整驱动电机的方向不断纠正AGV姿态,使之趋近于理想值。磁钉导航方案原理框图如图3所示。
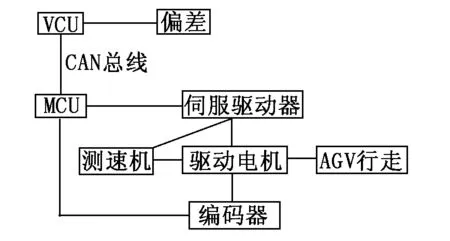
图3 磁钉导航方案原理框图
为精确控制AGV行走轨迹,AGV的电机驱动轮控制通常采用速度环和位置环的双闭环控制方案。速度环为内环,通过伺服给定信号与连接在电机轴上的测速机的反馈信号进行调速,也有很多厂家通过增加绝对值编码器,直接通过绝对值编码器实现闭环;位置环为外环,运动控制器给出信号要求AGV行走一定的距离,电机轴上的码盘将实际的行走距离反馈给MCU,实现闭环。双闭环控制结构如图4所示。
4 户外环境磁钉施工工艺
由公式(2)可知,传感器检测误差L1与L2的精度直接决定了误差α的数值,从而直接影响AGV行走精度。一般户外环境比室内环境更恶劣,以户外环境为例,为适应户外导航环境要求及磁钉导航方式,必须开发可以适应户外环境的高精度磁导航传感器以满足磁钉导航需求。
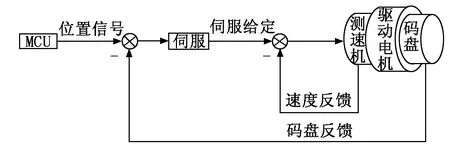
图4 双闭环控制结构
沈阳新松机器人公司开发的户外高精度磁导航传感器产品GSC2101及配套使用的Spot-M20.10磁钉,经试验验证,在使用时导航传感器下表面距地表距离控制在70 mm高度,磁钉S极朝上,且整体预埋入地表下后S极距地表深度控制在≥10 mm,即磁钉S极上表面距车体上的磁钉导航传感器下表面控制在80±1 mm,可实现导航传感器对磁钉的最优检测。
高精度磁导航传感器属于精密的磁场检测设备,对周围的磁场环境要求也比较严格,为了保证磁导航传感器的正常使用,一般距离周围50 mm以内不能有铁质或钢性材料,使用的导航支架也优先选用铝质材料,并且要远离大功率电机等,防止产生磁场干扰。
在现场施工时,对磁钉施工也有明确的要求,例如Spot-M20.10磁钉在预埋时,为保证高精度磁导航传感器对磁钉的检测效果,依据磁钉传感器下表面距地表距离控制在70 mm高度,磁钉S极上表面距车体上的磁钉导航传感器下表面控制在80±1 mm的要求,在用水钻在地面打孔时先通过导向模具控制钻头与地面的垂直度,Spot-M20.10磁钉高度为18 mm,钻孔深控制在35 mm,将防水环氧树脂在室温(25 ℃)条件下按照1∶5比例(重量比)混合,并搅拌均匀,混合好后倒入孔内,用格尺测量液面距离地表的高度为28 mm(如图5所示),在室温条件下静止24 h,待其凝固后将磁钉的S极朝上,垂直放入孔内,再灌入环氧树脂,使其能充分地包裹住磁钉,灌入的速度不宜过快,让树脂充分地流入孔内的各个缝隙中,最后与地表一平,室温下静止24 h待树脂凝固。

图5 磁钉预埋示意图
填埋的磁钉应与地面保持垂直,倾斜角度太大会对AGV行走轨迹造成影响,在施工完成后需对磁钉的倾斜角度进行检测。可将AGV开到磁钉正上方,磁钉对准导航中心,观察车体软件导航数据,如果数值在±0.1以内,说明磁钉垂直于地面,如果超出范围可再进行调整。
5 结语
磁钉导航技术因为磁钉预埋在地面下,整个工厂地面以上没有其他导航辅助设备,因此其隐秘性好且美观,抗干扰性强,抗磨损性强,抗酸碱、油污等,体现出了其不怕下雨积水等户外环境的优点,成为AGV应用领域中的一个重要分支。
