弯道盲区可视化安全行车装置设计与研究
2020-08-20彭同兴王丙龙林伟权鲍向文王灏荃
彭同兴,王丙龙,林伟权,周 滔,鲍向文,王灏荃
(中北大学机电工程学院,山西 太原 030051)
0 引言
交通事故近年来呈不断增长事态,尤其是山区、农村弯道路段盲区多,约占交通事故多发路段总数的12.5%。弯道路段每百起事故死亡人数为136人,为各个路段的最高,驾驶员未能及时判断路面交通状况是主要原因。
针对弯道路段交通情况预警不及时,交通事故多发的问题,本文设计了基于Arduino和GSM的弯道盲区可视化安全行车装置。该装置检测弯道路段两端是否有车辆通过,通过信号灯为行驶的车辆提供预警,帮助驾驶司机及时了解弯道路段交通情况,从而实现弯道路段交通情况的可视化。该弯道盲区可视化安全行车装置更方便、更醒目、更安全的提醒司机安全行车,减少弯道路段交通事故的发生[1,2]。
1 整体方案
基于Arduino和GSM的弯道盲区可视化安全行车装置的控制系统采用Arduino Mega 2560作为控制器,由检测与警示系统、精准报修系统组成,控制系统如图1所示。
2 检测与警示系统
检测和警示系统包括硬件系统和控制系统,可以实现弯道路段往来车辆的检测及警示功能。

图1 系统结构框架图
2.1 硬件系统
检测和警示系统主要由Arduino Mega 2560控制器、E3F-DS30C4接近漫反射式红外传感器、信号灯及外部电路组成,E3F-DS30C4接近漫反射式红外传感器用于探测有无车辆经过,并以输出高低电平的方式将信号传输至控制器,Arduino Mega 2560作为系统控制器,接收红外线传感器信号,控制信号灯的亮灭[3]。
E3F-DS30C4接近漫反射式红外传感器:漫反射式光电传感器集发射器与接收器于一体,在前方无物体时,发射器发出的光不会被接收器所接收到,开关不动作;当前方有物体经过时,接收器就能接收到物体反射回来的部分光线,通过检测电路产生跳变的电平信号使开关动作。
Arduino Mega 2560控制器:Arduino Mega 2560是基于ATmega 2560的微控制板,通过USB连接电脑或者用交直流变压器就能使用,其自带的驱动芯片可以对输入的信号进行处理,并控制外电路运行。
2.2 控制系统
根据实际路况,合理放置红外传感器,确定检测区间的起始位置a和区间长度l,在程序中将a和l作为常量。利用单片机外部中断检测车辆信号,实际就是检测红外传感器的电平跳变,设定两传感器触发先后顺序,防止反向触发,沿道路行驶方向第一个红外线传感器触发时计时开始,第二个红外线传感器触发时计时停止,根据l可求出当前车速。将得到的车速与设定车速作比较,若超速,则亮起本侧红灯与对侧黄灯;若未超速,则仅亮起对侧黄灯。
2.3 工作原理
当车辆经过传感器时,传感器输出电平发生跳变,跳变触发中断,每次中断发生时,记录当前系统时间,根据两次中断发生的时间差和两传感器之间的距离即可算出车辆的速度。根据交通规定中通过急弯的最大速度不能高于30km/h,判断车辆是否超速。若车辆超速,则超速车辆一侧红色信号灯亮起,提醒驾驶员当前超速,减速慢行,同时对侧黄色信号灯亮起,提醒对侧驾驶员对向来车,谨慎行驶。
3 精准报修系统
精准报修系统主要由硬件系统和控制系统组成,可以实现该装置的故障检测和报修功能。
3.1 硬件系统
精准报修系统主要由全球移动通信系统(GSM)模块、光敏电阻式光照传感器等硬件组成。
采用Arduino Mega 2560控制模块,接收处理光敏电阻式光照传感器的警示灯故障检测报修信号,触发自动报修。GSM模块是具有独立的操作系统、GSM射频处理、基带处理并提供标准接口的功能模块,将故障装置的位置信息发送给维修人员[4]。光敏电阻式光照传感器用于检测警示灯是否正常工作,正常工作的警示灯发光使得该传感器输出低电平;如果警示灯没有发光则该传感器输出高电平,并将检测信号传输到控制模块报修系统。
3.2 控制系统
根据实际路况,将警示灯位置进行编号,编号为Lo-Ln,自检系统的传感装置接收信号灯的光照信号,以光照强度判定装置是否出现故障。判断方法为单片机ADC采集光敏电阻电压与设定阈值相比较,若出现故障,将警示灯的位置信息送给维修人员,工作原理如图2所示。
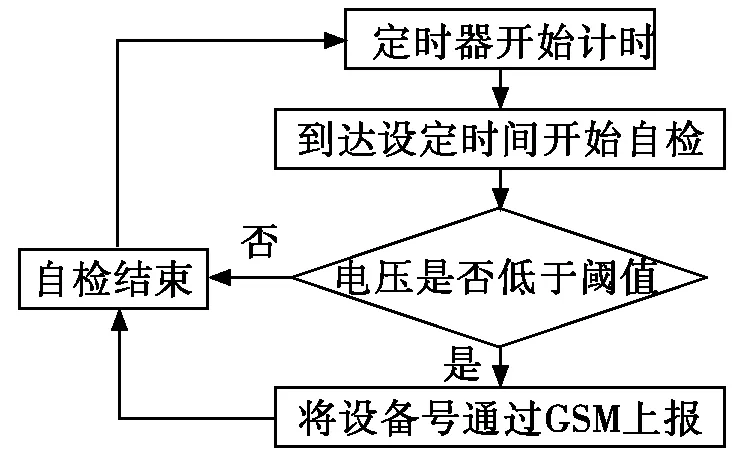
图2 故障检测报修流程图
3.3 工作原理
光敏电阻式光照传感器对开启的警示灯光线进行检测,当未检测到警示灯光线时将故障警示灯位置信息信号传递到控制系统,控制系统通过控制GSM模块将故障警示灯位置信息传递给维修人员。
4 实验测试和结果
弯道盲区可视化安全行车装置工作流程图如图3所示,模型如图4所示,通过装置模型对车辆通过、计算车辆速度、警示灯亮灭、装置的故障检测和报修功能依次进行测试。车辆经过情况下,车辆未超速,仅亮起对侧灯;若车辆超速,本侧红灯与对侧黄灯皆亮起。经过多次实验与研究,该模型装置可以检测到车辆通过,计算车辆速度,控制警示灯亮灭,实现装置的故障检测和报修功能。

图3 装置工作流程图

图4 装置模型图
5 结论
基于Arduino和GSM的弯道盲区安全行车装置的车辆检测率为100%,测速准确率为100%,故障检测和报修率为99%,并准确控制警示灯的亮灭,为弯道路段两侧往来车辆提供直观的路况即时预警,降低了弯道盲区路段的事故发生率,提高了弯道通行的安全性。该装置成本低廉,可根据路段实际情况进行安装,具有应用性和科学性。
