双目机器人抓取动态物体的算法研究
2020-08-19张广纪戚海永
张广纪 戚海永
摘 要:随着当前社会的发展,机器人参与生产实践中已经在部分领域取代了人工。而双目机器人更是因为其优越的视觉传感与二维转换三维坐标,得到了广泛关注笔者结合自身实践,利用双目机器人识别与定位动态物体的位置,让双目机器人在各大生产领域的工作中得到广泛应用。在本文中笔者主要对双目机器人在面对动态的不规则物体或材质比较柔软的物体的时候,如何进行图像的处理,如何进行视觉处理,如何对图像信息分割得到坐标,二维坐标如何转换为三维坐标,最终实现动态物体的抓取进行了研究与分析。希望为相关行业提高生产效率、降低人工成本提供参考,共同促进机器人生产的高效、稳定与便捷。
关键词:双目机器人;动态物体;算法研究
一、图像处理——阈值分割算法
笔者在进行处理时采用的方法是阈值分割算法,这种方法使用起来简单方便且处理信息速度较快,在动态物体的颜色与背景颜色有明显区分的时候使用效果较好。第一步选择好合适的阈值;第二步通过选择好的阈值将动态物体像素点分割成不同的灰度。这一过程中,确定阈值是依靠被抓取物体的灰度值与背景的灰度值的二者区别,在确定好阈值T之后,将上述图像中的各个像素点属性与T进行比较,符合的确认为抓取的目标,不符合的确认为背景。
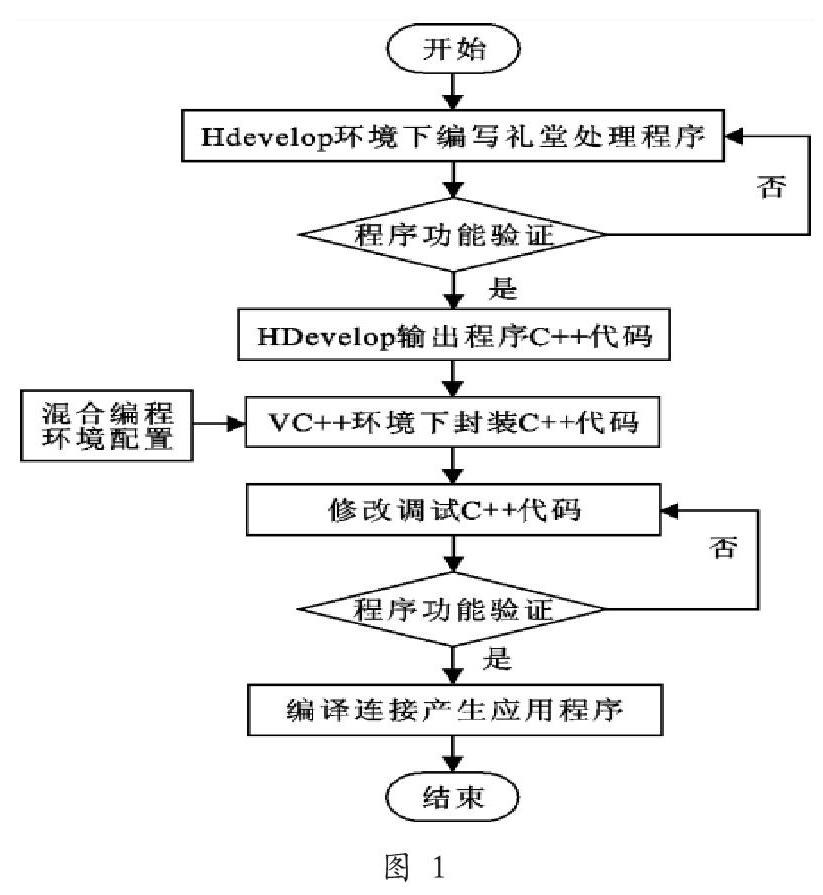
由上述过程可知,在实践中得出准确的阈值是进行阈值分割法的基础,笔者为确定阈值,往往采用计算的方法。首先设Pi为参照用的像素值,将临近区域设为Ps,比较Pi与Ps;其次设最大像素值为Psmax,最小像素值为Psmin,次大值为Psmaxs,次小值为Psmins;最后在Pi 结束上述分割计算过程之后,确定了被抓取的物体的位置,接下来要确定的是双目机器人进行抓取的抓取点笔者采用的是结合了遍历法与中心法的遍历中心法。[1]双目机器人确定被抓取物体的最大内接矩形,再将矩形形心确定为抓取点。而这一过程的意义在于,内接矩形的应用,避免了月牙形形状在使用中得到的中心点却不在被抓取物上的情况。 二、图像分割与质心求取 2.1视觉处理——以HALCON为例子 利用HALCON进行视觉处理实际的流程如图1所示 2.2系统功能的实现 想要将上述流程转变为功能,需要借助的是VC++,在使用VC++的前提下,利用HALCON中的圖像处理函数。而想要做到这一步需要在VC++中设置出HALCON的使用环境,首先需要把HALCON的图像处理库的连接文件、头文件的路径与连接的路径设置在VC++的环境。 三、双目机器人抓取动态物体 上述的两个步骤,是笔者构建起的进行被抓取物的图像分割的原理与计算重点,及通过VC++与HALCON的组合构建过程,实现最终的图像处理与将信息传递给双目机器人的传递执行部分。 3.1摄像机锁定被抓取物 首先要明确的是“摄像机标定”的概念,即为了建立起三维的视觉空间,需要借助摄像机拍摄被抓取物的二维的图像信息的技术。而通过摄像机锁定被抓取物,有两个考虑部分,一个是外部参数的标定,一个是内部参数的标定。而在成像模型的构建上也分成两个部分,一个是线性模型,一个是非线性模型。 摄像机锁定被抓取物的原理与作用是,通过双目机器人的两个摄像机的工作,机器人获得图像坐标,处理这些坐标后,机器人可以构建起世界坐标,并在世界坐标中确定出目标抓取物的位置。再利用平面模板,去代替立体下标定的方块,将得到的矩阵进行分解可以得到上文中提到的外部参数与内部参数。[2] 3.2机器人抓取动态物体的轨迹制定 在经过3.1的流程之后,双目机器人已经获得了动态物体的抓取点,机器人的控制卡获得了世界坐标,针对起点不同、终点不同进行机器人运动的轨道的规划,使机器人准确预判动态物体的位置,抓取到目标。这一过程中调动的是双目机器人的对于这个位置的全部关节和需要调动的全部姿态。 四、结束语 本文结合当前机器人在实际生产中的需要,对相关的信息进行了搜集整理,在“以实际应用为出发点”的基础上,从各个环节对双目机器人抓取动态物体的算法研究进行了分析,从图像处理的方法、流程与作用入手,分析了图像的分割与质心的求取,并对后续双目机器人的抓取轨迹进行了探讨。笔者将分析思路借助实践进行综合考量,不断尝试、探索、修改,最终得出完善的双目机器人抓取动态物体思路。结合现实因素分析,当前机器人参与生产这一领域在不断扩大,整个行业处于不断的发展阶段,有良好的发展机遇,也有很多潜在的问题与等待解决的难点,笔者希望以此文,为双目机器人的发展和整个行业的发展,提供理论支持与参考,与同业者一起,共同促进行业的长期稳定与健康发展,通过机器人代替人工,刺激经济增长,节约劳动成本,进而提高人们的生活质量。 参考文献 [1]谢新华,梁栋,张香倩,等.基于图像处理的目标物体最大内接矩形面积的检测[J].科学技术与工程,2015(17):193-197. [2]谢莉,余胜.摄像机标定算法研究[J].科技视界,2011(4):22-24. 作者简介: 张广纪(1997-),男,汉,安徽人,大专,机电一体化专业。戚海永,江苏建筑职业技术学院,汉。 基金项目:《双目机器人抓取动态物体的算法研究》,徐州市科技计划项目(KH17015)。
