基于无人机多光谱遥感图像的玉米田间杂草识别
2020-08-15赵静李志铭鲁力群贾鹏杨焕波兰玉彬
赵静,李志铭,鲁力群,贾鹏,杨焕波,兰玉彬
基于无人机多光谱遥感图像的玉米田间杂草识别
赵静1,2,李志铭1,2,鲁力群2,3,贾鹏1,2,杨焕波1,2,兰玉彬1,2
(1山东理工大学农业工程与食品科学学院,山东淄博 255000;2山东理工大学国际精准农业航空应用技术研究中心,山东淄博 255000;3山东理工大学交通与车辆工程学院,山东淄博 255000)
【目的】为了精确高效识别玉米田间杂草,减少除草剂施用,提高玉米种植管理精准性。【方法】通过六旋翼无人机搭载多光谱相机获取玉米田块多光谱图像。为分离图像中植被与非植被像元,计算了7种植被指数,采用最大类间方差法提取植被指数图像中非植被区域,制作掩膜文件并对多光谱图像掩膜。通过主成分分析对多光谱图像进行变换,保留信息量最多的前3个主成分波段。将试验区域分为训练区域和验证区域,在训练区域中分别选取了675处玉米和525处杂草样本对监督分类模型进行训练,在验证区域选取了240处玉米样本及160处杂草样本评价模型分类精度。将7种植被指数、3个主成分波段的24个纹理特征及经过滤波的10个反射率,共计41项特征作为样本特征参数。利用支持向量机-特征递归消除算法(support vector machines-feature recursive elimination,SVM-RFE)和Relief算法从41项特征中各筛选14项特征构成特征子集,采用支持向量机、K-最近邻、Cart决策树、随机森林和人工神经网络对特征子集进行监督分类。【结果】支持向量机与随机森林对全部特征及2个特征子集分类效果较好,支持向量机总体精度为89.13%—91.94%,Kappa>0.79,随机森林总体精度为89.27%—90.95%,Kappa>0.79。【结论】SVM-RFE算法对数据降维效果优于Relief算法,支持向量机(SVM)模型对区域冠层尺度下玉米与杂草的分类效果最好。
杂草识别;无人机遥感;多光谱图像;特征选择;监督分类
0 引言
【研究意义】在农业生产过程中,田间杂草被视为严重影响作物生长的因素之一,中国因杂草导致的粮食作物产量损失达总产量的10%[1]。草害容易集中大规模爆发,且与作物幼苗争夺生长所需的资源,致使作物幼苗生长发育缓慢,作物产量降低,因此必须对田间杂草及时控制。化学除草法由于其高效性,已成为国内外的主要除草手段,但地毯式地使用化学除草剂不仅对农田及周围生态环境造成一定的破坏,其残留在作物叶片上的药剂也对食品安全造成危害[2]。2015年农业部明确了“双减”的目标来治理农业面源污染,即通过技术手段和管理方式减少农业中化肥和农药的使用,实现农业的可持续发展[3-5]。因此,研究精准的作物杂草识别方法,对于农药精准变量喷施技术的发展具有重要意义[6-8]。【前人研究进展】当前杂草识别研究中,根据图像信息获取手段及图像特征提取方式不同,可分为基于光谱特征、机器视觉以及光谱成像的杂草识别方法[9-10]。目前广泛采用的是基于机器视觉的识别方法,针对获取的作物及杂草图像,利用计算机分析图像中作物与杂草所表现出的形状、纹理和颜色等特征,提取差异较大的特征参数对目标进行识别检测。邓向武等[11]通过数码相机地面获取稻田杂草图像,提取其颜色、形状和纹理特征,采用深度置信网络对杂草进行识别,识别率为83.55%。孙俊等[12]提出一种空洞卷积与全局池化相结合的多尺度特征融合卷积神经网络模型,对多种农作物幼苗及杂草进行训练识别,平均测试识别准确率达到98.80%。何东健等[13]利用多光谱相机地面采集3类杂草图像,提取叶片形状、纹理及分形维数特征,将支持向量机分类结果引入DS融合算法,正确识别率达96.11%。基于光谱特征的杂草识别多为传感器地面采集作物和杂草的光谱数据,筛选有效区分作物和杂草波段进行识别。潘冉冉等[14]利用高光谱成像系统室内采集油菜及多种杂草的高光谱图像,通过对比多种光谱预处理方法及多种分类模型,发现通过主成分载荷、载荷系数法及连续投影法作为特征波长提取方法,极限学习机模型所得分类精度最高。王海华等[15]通过无人机获取麦田可见光影像,利用剪切波变换获取小麦与杂草的剪切波系数,根据小麦与杂草剪切波系数的特征差异,对杂草进行识别,准确率为69.2%。肖武等[16]通过无人机获取采煤沉陷湿地多光谱影像,构建面向对象分类方法,对湿地植被进行分类,总体精度达84.2%。【本研究切入点】目前对作物与杂草的识别研究多在实验室条件下或田间地面采集作物、杂草叶片进行分类,数据采集覆盖范围较小,工作强度大,且无法从整个大田区域及植物冠层尺度对作物和杂草进行分类。无人机遥感可快速高效获取目标区域内植被冠层影像,监测范围广,能够一次性采集大面积田块及植被数据,节省时间。但无人机遥感获取的影像相对于地面遥感获取的图像数据分辨率低,如何提高无人机遥感影像的识别分类精度是需要解决的一个问题。【拟解决的关键问题】本文以无人机获取的玉米地块尺度的多光谱影像中玉米和杂草为研究对象,采用最大类间方差法去除图像非植被像元,提取玉米及杂草冠层的植被指数、纹理和反射率等多种特征,采用监督分类模型对试验区域内玉米和杂草进行像元级语义识别,以期得到利用无人机遥感平台获取区域冠层尺度下玉米和杂草识别的最佳特征及模型,为快速获取田间玉米和杂草分布,确定植保机械杂草施药量提供参考。
1 材料与方法
1.1 研究区域概况
试验地点为山东理工大学农业工程与食品科学学院试验田,位于山东省淄博市南定镇(36°44′36″N,118°3′23″E),该区域地处暖温带,属温带季风气候,多年平均降水量650 mm,年平均气温12.5℃—14.2℃,年平均日照时长达2 209.3—2 523.0 h,年平均无霜期190—210 d。试验田总面积约为6 000 m2,研究区域总面积约为2 500m2。试验田内主要种植作物为玉米,种植时间为2018年6月中旬,采用山东理工大学2BMFS3-240K振动深松分层施肥精播机进行播种,行距70 cm,株距20 cm。杂草种类主要为狗尾草、三叶草和稗草。
1.2 数据获取
图像数据采集时间为试验田玉米播种后一个月,于2018年7月14日进行。无人机平台采用南京禾谱航空科技有限公司HP6900六旋翼无人机,该机轴距900 mm,起落架尺寸460 mm(长)×450 mm(下底宽)×360 mm(高)、续航时间20 min,最大起飞质量8.2 kg,通讯距离5 km。利用Red Edge-M多光谱相机获取图像数据,该传感器包含蓝光、绿光、红光、红边、近红外5个通道,图像分辨率1 280×960,拍摄图像存储于相机内部SD卡。图像采集时段为正午11:00—13:00,天气晴朗,地面无风,满足无人机平台飞行要求。试验设计飞行高度为30 m,航线12条,飞行速度3 m·s-1,航线总长1.045 km,航向重叠度85%,旁向重叠度85%,采用垂直方式采集图像,获得5个单通道图像共计2 630幅。
试验区拍摄图像通过Pix4Dmapper软件进行校正和拼接等预处理操作,首先对单幅图像进行辐射校正和几何校正,然后根据飞行POS数据寻找同名点,通过空三测量计算原始影像生成点云模型,最后添加纹理得到蓝、绿、红、红边、近红外5幅单波段图像。使用ENVI软件Layer Stacking功能将5幅单波段图像融合为多光谱图像,如图1所示。
1.3 研究方案
本试验以大田玉米多光谱图像为研究对象,首先计算多光谱图像的植被指数,使用最大类间方差法获得分离裸土与植被(玉米与杂草)像元的阈值,实现图像背景像元去除;其次,应用主成分分析算法(PCA)对多波段图像进行降维,提取感兴趣区域内玉米及杂草的植被指数、纹理特征和反射率作为杂草识别特征,利用特征选择方法创建数据集的子集;最后,将数据集分为训练集和测试集,训练并测试多种监督分类模型,选取分类精度最高的监督分类器及特征选择方法,对验证区域进行玉米杂草识别。技术路线如图2所示。
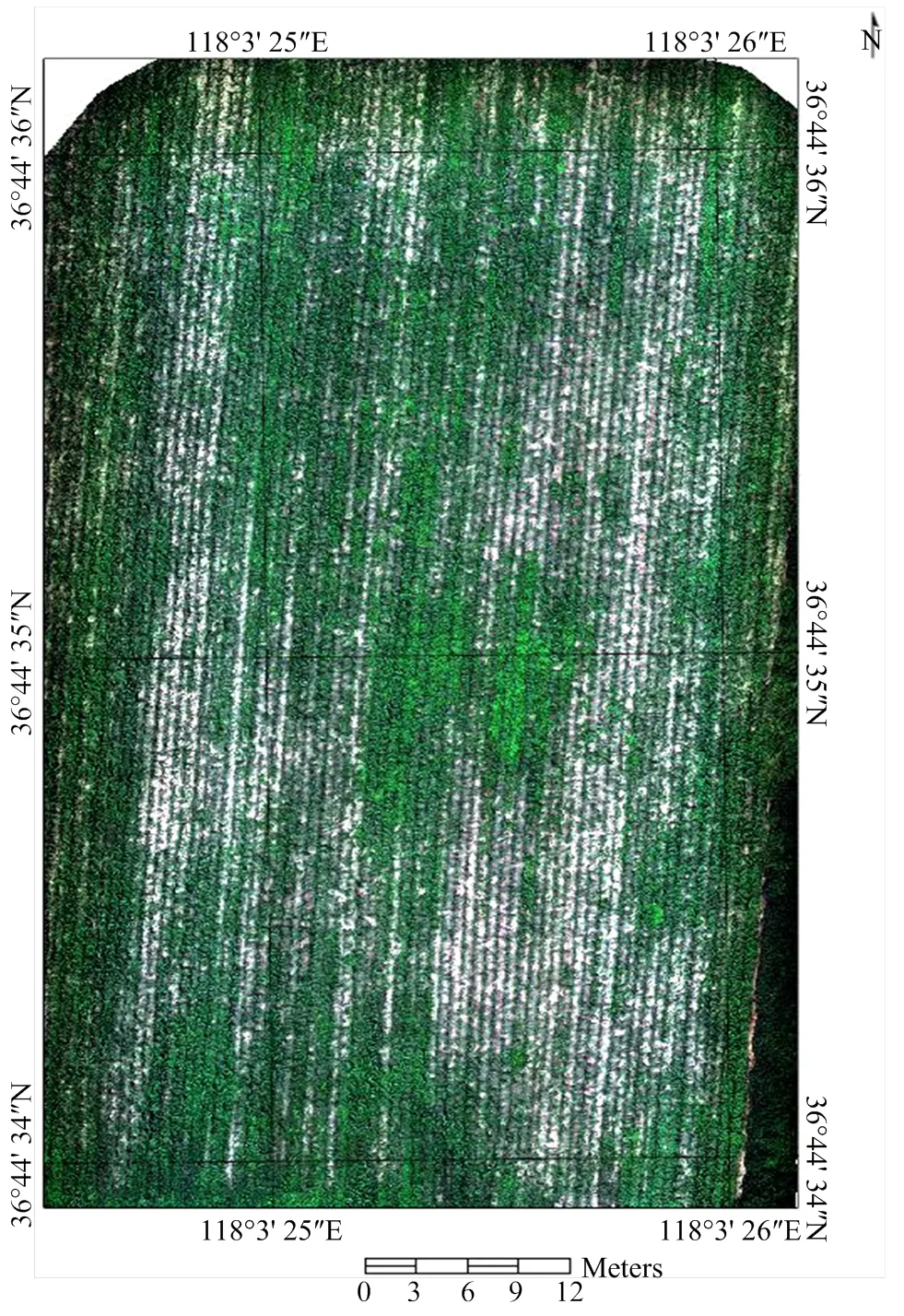
图1 试验区域多光谱图像
1.4 裸土阴影像元去除
通过对多光谱图像中的蓝、绿、红波段组成的RGB图像分析发现,图像中的主要植被为玉米和杂草,非植被主要为裸土及玉米叶片遮挡所产生的的阴影。由于植被与非植被色彩差异明显,因此可从多光谱图像中去除非植被背景像元,从而提高杂草识别的效率并节省运行时间。
最大类间方差法(Otsu)是一种基于图像灰度直方图的阈值选择方法[17],它将图像像元分为2类,若图像中背景和目标之间的差异增大,则2类图像像元间的差异也会增大。因此,使图像像元类间方差最大化的阈值即为分割图像的最佳阈值。
植被指数是某些特定波长反射率的组合,是对植物叶片色素和营养状况的响应[18]。由于不同植物反射率存在差异,其植被指数值也各异。本文选择了NDVI、DVI、RVI、SAVI、OSAVI、GNDVI和EVI等7种常见的植被指数[19-26],通过ENVI软件Band Math功能生成植被指数灰度图像。采用Otsu算法对7种植被指数图像进行非植被像元提取,发现差值植被指数(DVI)图像的植被与非植被地物分离效果最好,因此提取DVI图像的非植被区域制作掩膜文件,对多光谱图像进行掩膜,实现植被与非植被像元的图像分割。
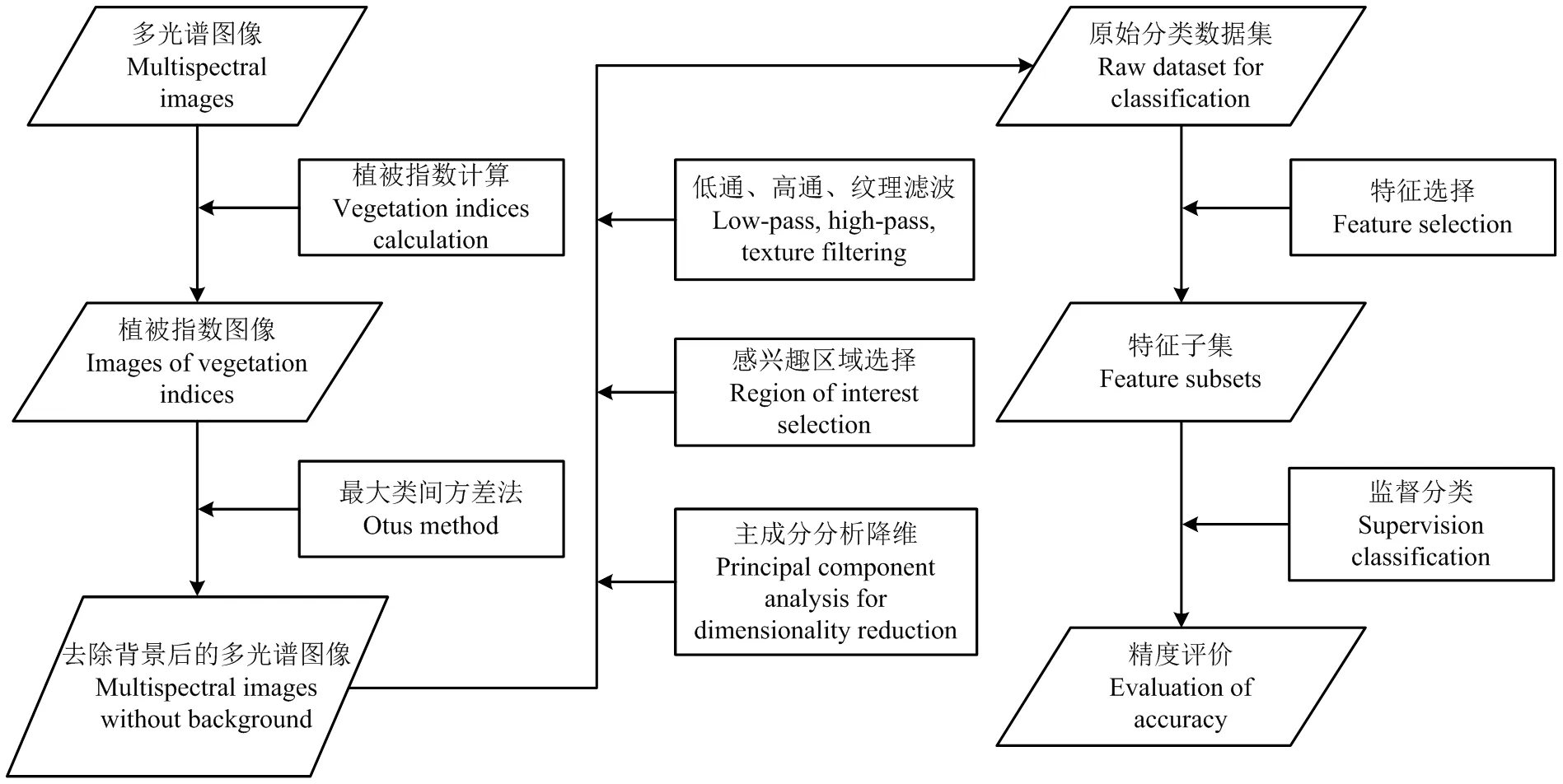
图2 技术路线
为了有效去除多光谱图像各波段间冗余信息,降低波段间相关性,将有效信息集中到较少的转换波段中,最大限度地表征原始数据信息[27-29],故本试验采用主成分分析法(principal component analysis,PCA)对多光谱数据进行降维,消除多光谱数据中的冗余信息。
变换后的多波段图像有5个主成分,其信息量分别为80.42%、13.93%、5.00%、0.48%和0.17%。因前3个主成分累加为99.35%,故仅保留信息量最多的前3个主成分,舍弃其余2个主成分。
1.5 玉米及杂草特征参数提取
玉米和杂草之间没有明显的颜色差异,仅使用植被指数很难对玉米与杂草分类识别,有必要使用多种特征对其分类。部分杂草未能在伪彩色图像中与玉米叶片显示出色彩差异,且杂草像元与玉米像元各主成分值相近,仅采用阈值法无法将玉米与杂草区分,因此选择提取多光谱图像中玉米和杂草的纹理特征和反射率进行分类。当前研究中常用的纹理分析方法为灰度共生矩阵法[30-34]。在实际应用中,多采用基于灰度共生矩阵计算出的统计量作为纹理识别的特征参数,本文选择均值、方差、协同性、对比度、相异性、信息熵、二阶矩、相关性等8项纹理特征参数进行分析。
如图3所示,试验区被分为4个区域,验证区域面积约为600 m2,3个监督分类训练区域,每个区域面积为600 m2,总面积1 800 m2。由于图像采集时的飞行高度为30 m,可人为在图像中对玉米与杂草进行手动分类并选取感兴趣区域(ROI)。通过人工选择的方式,在每个训练区域内选取225处玉米样本感兴趣区域,175处杂草样本感兴趣区域,考虑到特征统计的一般性,每个训练区域内感兴趣区域选择尽可能均匀分布,为避免框选已掩膜区域,感兴趣区域无特定形状,仅确保每个感兴趣区域包含100个像元。训练区域共有675处玉米感兴趣区域和525处杂草感兴趣区域。
每处感兴趣区域均被视为一个样本。从玉米及杂草感兴趣区域中提取的植被指数、纹理和反射率的统计量均值作为样本特征。图像经主成分分析变换后3个主成分波段的8种灰度共生矩阵统计量作为纹理特征,共计24个纹理特征。使用ENVI软件的Convolutions功能对多光谱图像各波段分别进行低通和高通滤波,获得多光谱图像5个波段的10个反射率。
将3个训练区域共计1 200个样本(包括675个玉米样本和525个杂草样本)作为原始数据集,每个样本具有41项特征,包括植被指数(7)、纹理特征(24)和反射率(10)。将数据集以2﹕1的比例随机分成训练集和测试集。训练集用于监督分类模型的训练,包含450个玉米样本和351个杂草样本,由3个训练区域各随机提供的150个玉米样本和117个杂草样本组成。测试集由原始数据集剩余1/3样本组成,即每个训练区域余下的75个玉米样本和58个杂草样本,测试集用于分类器最优参数选择。

图3 训练区域及验证区域
1.6 特征选择算法及监督分类模型选取
为了提高模型运算效率,减少数据集维度,本文选择了2种特征选择方法对原始数据集进行降维。
基于支持向量机的递归特征消除(SVM-RFE)是一种嵌入式特征选择方法[27, 35-36]。其原理是在线性SVM分类器的训练过程中对样本特征进行选择。在特征选择之初,所有特征都参与线性SVM模型训练,依据各特征对分类的贡献度,舍弃贡献最少的特征,剩余特征重新训练线性SVM分类器。SVM分类器的训练与特征移除不断迭代,直至剩余特征数量达到用户预设值。
为了与SVM-RFE算法进行比较,选择了一种过滤式特征选择方法Relief算法对原始数据集降维[27, 37]。Relief算法主要用于二类问题的特征选择,使用与初始特征对应成分的相关统计量来衡量特征的重要性,对应成分较大者的特征将在分类中起重要作用。
通过交叉验证获得SVM-RFE算法训练线性SVM模型的最佳特征数量为14,将具有该14项特征的数据集称为SVM-RFE子集(第一主成分均值、方差、协同性、相异性、二阶矩、相关性、第二主成分均值、信息熵、相关性、第三主成分均值、差值植被指数、比值植被指数、增强型植被指数、红边高通反射率)。使用Relief算法对所有特征按对应成分大小进行排序,选取前14项特征组成Relief特征子集(第一主成分协同性、信息熵、相关性、第二主成分均值、信息熵、相关性、第三主成分均值、方差、相关性、蓝色低通反射率、绿色低通反射率、红边低通反射率、蓝色高通反射率、红边高通反射率)。
使用5种监督分类模型对原始数据集及特征子集进行分类。监督分类模型分别为支持向量机(SVM),K-最近邻(KNN),Cart决策树(Cart),随机森林(RF)及人工神经网络(ANN)。在分类前对数据集进行归一化处理,应用10折交叉验证法对模型进行训练。5种监督分类器的训练及测试由python编程实现。
1.7 精度评价
对5种监督分类模型进行精度评价,采用准确率()、精确率()、召回率()、1值4个指标作为精度评价指标[38],准确率为正确预测的数量占样本总数的比值,精确率为真正例占所有预测正例样本之比,召回率表示预测正例占所有正例样本之比,1值为精确率与召回率的调和平均值。



式中,为真正例;为假反例;为假正例;为真反例。使用宏平均值综合考察准确率与召回率。

式中,P为平均精确率;R为平均召回率;1m为平均1值;为交叉验证次数;P为第次验证精确率;R为第次验证召回率。
2 结果
分别采用原始数据集、SVM-RFE特征子集、Relief特征子集对5种监督分类模型进行训练与优化,并通过玉米杂草分类结果分析不同监督分类模型及特征选择方法间的差异。
2.1 原始数据集分类结果分析
原始数据集分类结果如表2所示。在5种监督分类模型中,ANN模型测试集分类准确率最高,达99.0%;其次为SVM模型,准确率达98.48%,两者准确率差异较小;Cart模型准确率最低,仅为91.41%。由多个Cart模型集合而成的RF模型分类准确率为96.46%,优于单个Cart模型表现。5种监督分类模型测试集准确度及精确度均高于90%,对纹理、植被指数和反射率特征构成的数据集分类效果良好。
2.2 特征子集分类结果分析
分别采用Relief特征子集与SVM-RFE特征子集对5种监督分类模型进行训练及测试,分类结果如表3和表4所示。与原始数据集分类结果相比较,监督分类模型对Relief特征子集的分类效果有所下降,测试集准确率平均下降1.68%。原始数据集中分类效果较好的3种模型准确率下降幅度均超过1.2%,而分类效果较差的KNN及Cart模型,准确率变化幅度在0.75%以内。在Relief特征子集对测试集的分类结果中,SVM模型的准确率最高,达97.22%;ANN模型精确度略低于SVM,为96.67%;RF模型准确率下降幅度最大,相对于原始数据集结果下降了3.53%,仅为92.93%。
在SVM-RFE特征子集的分类结果中,ANN与SVM测试集分类精度相对于原始数据集结果变化极小,ANN具有最高的准确率,为99.0%;SVM准确率仅下降0.26%,为98.23%。相较原始数据集结果,RF、KNN与Cart模型准确率提升,其中KNN、Cart模型准确率分别提高2.02%、3.03%。KNN模型在Relief、SVM-RFE特征子集的分类结果中,训练集准确率均为100%,而测试集准确率分别为93.43%和95.96%,存在过拟合现象。

表2 原始数据集分类结果

表3 Relief特征子集分类结果

表4 SVM-RFE特征子集分类结果
对比原始数据集、Relief特征子集与SVM-RFE特征子集的分类结果可以发现,各模型精确率、召回率及1值的高低分布与其准确率一致,且相同模型同一数据集的精确率与召回率差异较小,根据公式(2)、(3)可知,模型对玉米(真正例)识别效果较好,错误识别结果(假正例、假反例)较少。监督分类模型对SVM-RFE特征子集的分类效果优于Relief特征子集。SVM-RFE特征子集中,ANN与SVM模型的准确率与原始数据集相近,且RF、KNN与Cart模型准确率有所提升。
2.3 监督分类模型识别精度验证
分别利用对测试集分类准确率较高的SVM、RF、ANN 3种模型,对图3验证区域采用全部特征、Relief特征子集、SVM-RFE特征子集进行杂草识别,验证各模型分类精度,玉米杂草分类结果图4所示。根据监督分类结果与验证区域内人工标记的240处玉米样本及160处杂草样本计算混淆矩阵,结果如表5—7所示。
比较不同特征集分类结果总体精度可以看出,使用全部41项特征的监督分类总体精度最高,仅使用14项特征的Relief及SVM-RFE特征子集分类总体精度略有下降。在全部特征的分类结果中,SVM模型的总体精度最高,达91.94%,Kappa系数为0.84;Relief特征子集的分类结果中,RF模型的总体精度最高,达89.27%,Kappa系数为0.79;SVM-RFE特征子集的分类结果中,SVM模型的总体精度最高,达90.76%,Kappa系数为0.82;在3种不同特征集分类结果中,RF与SVM模型的总体精度相近,相差1%以内。ANN模型总体精度较差,与其他2种模型精度差异明显。

表5 验证区域使用全部特征混淆矩阵
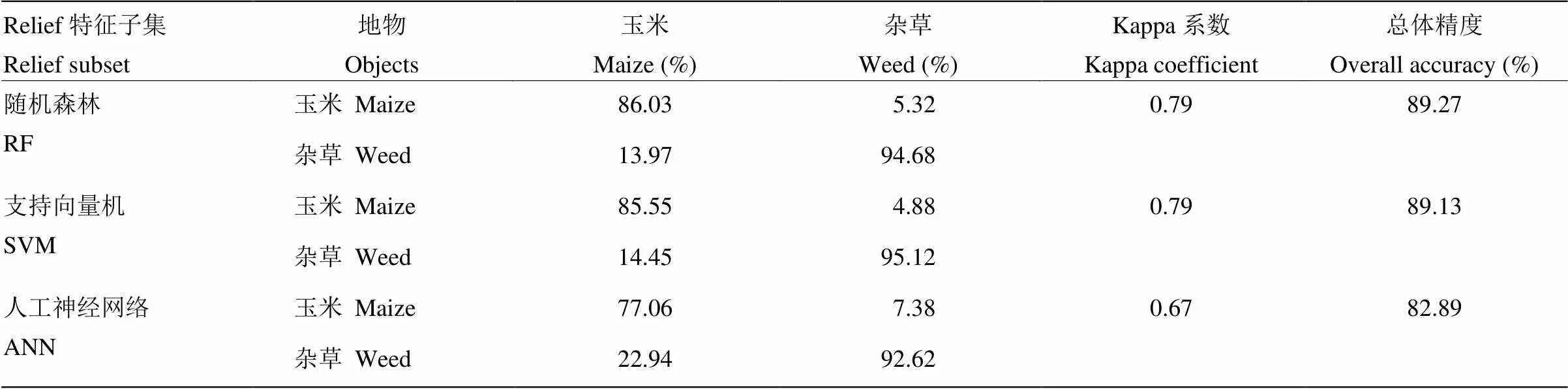
表6 验证区域使用Relief特征子集混淆矩阵

表7 验证区域使用SVM-RFE特征子集混淆矩阵
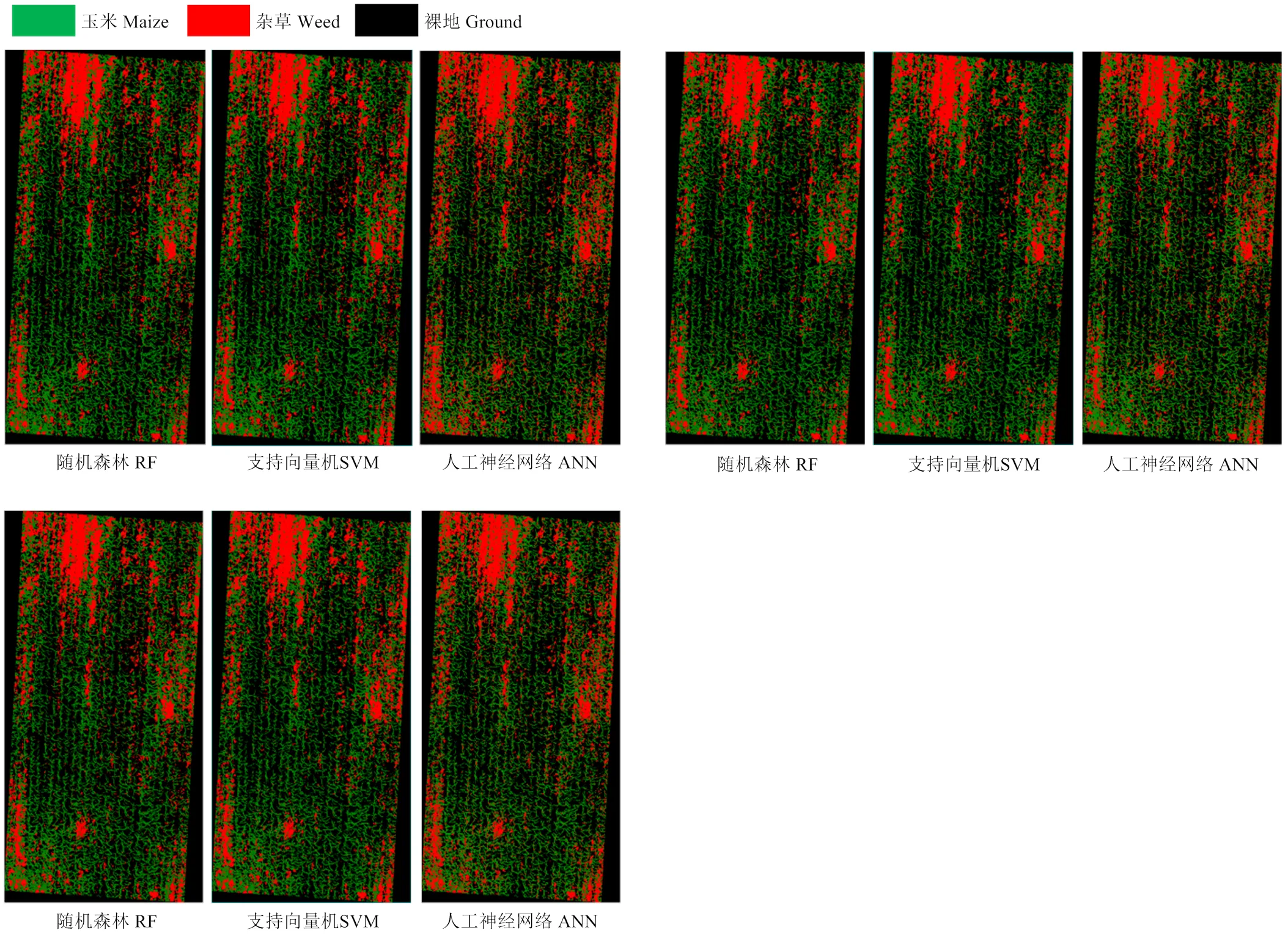
a. 验证区全部特征RF、SVM、ANN分类结果;b. 验证区Relief特征子集RF、SVM、ANN分类结果;c. 验证区SVM—RFE特征子集RF、SVM、ANN分类结果
在验证区域的玉米杂草分类结果中,SVM、RF、ANN 3种模型对SVM-RFE特征子集的总体精度高于Relief特征子集总体精度,与测试集结论一致。2种特征子集的总体精度相较全部特征都有所下降,但精度降低幅度较小,且SVM-RFE特征子集比Relief特征子集总体精度降低变化更小。结果表明,SVM-RFE算法与Relief算法相比可以更有效地降低原始数据集维度及消除冗余特征。
3 讨论
杂草识别研究多以地面传感器采集的作物、杂草作为研究对象,近距离获取高分辨率目标影像且背景干扰较小,故识别率整体较高。无人机获取的遥感影像覆盖范围大,但单株作物冠层分辨率较低,受背景像元影响较大,故相较地面杂草研究识别率有所下降。本文基于无人机多光谱遥感,通过多种特征提取及数据降维,对比不同的分类模型及降维算法,得到了能够快速准确识别田间杂草的分类模型及有效的降维算法。该研究对快速获取作物田间杂草分布,指导植保机械施药区域及施药量的计算具有一定的参考价值,但由于农田环境的多样与复杂,所选监督分类算法数量有限,还存在一些待改进之处。本试验在评价监督分类模型对验证区域的分类结果时,使用均匀分布于验证区域各处人工标记的玉米、杂草感兴趣区域,尝试仅使用部分地面真值对模型分类效果进行可靠评价,针对样本数量对分类效果评价的影响,将在下一步试验中加以探究。
玉米与杂草在播种前期株高差异较小,但后期二者株高差异明显,因此可以根据田间多时相的图像结合植被三维空间信息,将不同时期相同位置植被高度差值作为特征用于杂草识别,并根据多时相图像得到识别玉米田间杂草的最佳时期。本文仅对玉米、杂草进行识别区分,未对杂草进行具体种类区分,在下一步的研究中,可选择非监督分类方法对杂草样本进行聚类分析,结合实地调查获取杂草品种,对聚类方法进行精度评价。
4 结论
(1)利用无人机遥感获取的玉米田间多光谱图像,其差值植被指数图像可通过最大类间方差法提取非植被区域,从而实现图像中植被与非植被像元的分割。
(2)SVM-RFE 特征选择算法对原始特征降维效果优于Relief特征算法,所选择的特征子集分类结果相对于原始特征分类结果总体精度下降幅度较小。
(3)随机森林、支持向量机模型能够有效地对玉米和杂草进行识别,总体精度最高可达90.95%和91.94%,Kappa系数可达0.8以上,支持向量机模型总体分类效果最好。
[1] 翁凌云. 我国玉米生产现状及发展对策分析. 中国食物与营养, 2010(1): 22-25.
WENG L Y. Status of corn production in China and its countermeasures., 2010(1): 22-25. (in Chinese)
[2] Louargant M, Villette S, Jones G, Vigneau N, Paoli J, Gée C. Weed detection by UAV: simulation of the impact of spectral mixing in multispectral images., 2017, 18: 932-951.
[3] 山东省农业农村厅. 山东省到2020年农药使用量零增长行动方案. 山东农药信息, 2015(4): 13-14.
Shandong Provincial Department of Agricultural and Rural Affairs. Shandong province issued the action plan for zero increase of pesticide use in Shandong province by 2020., 2015(4): 13-14. (in Chinese)
[4] 周志艳, 明锐, 臧禹, 何新刚, 罗锡文, 兰玉彬. 中国农业航空发展现状及对策建议. 农业工程学报, 2017, 33(20): 1-13.
ZHOU Z Y, MING R, ZANG Y, He X G, LUO X W, LAN Y B. Development status and countermeasures of agricultural aviation in China., 2017, 33(20): 1-13. (in Chinese)
[5] 兰玉彬. 精准农业航空技术现状及未来展望. 农业工程技术, 2017, 37(30): 27-30.
LAN Y B. Current status and future prospects of precision agricultural aviation technology., 2017, 37(30): 27-30. (in Chinese)
[6] 何东健, 何勇, 李明赞, 洪添胜, 王成红, 宋苏, 刘允刚. 精准农业中信息相关科学问题研究进展. 中国科学基金, 2011, 25(1): 10-16.
HE D J, HE Y, LI M Z, HONG T S, WANG C H, SONG S, LIU Y G. Research progress of information science-related problems in precision agriculture., 2011, 25(1): 10-16. (in Chinese)
[7] 兰玉彬, 王国宾. 中国植保无人机的行业发展概况和发展前景. 农业工程技术, 2018, 38(9): 17-27.
LAN Y B, WANG G B. China's plant protection drone industry development overview and development prospects., 2018, 38(9): 17-27. (in Chinese)
[8] 史舟, 梁宗正, 杨媛媛, 郭燕. 农业遥感研究现状与展望. 农业机械学报, 2015, 46(2): 247-260.
SHI Z, LIANG Z Z, YANG Y Y, GUO Y. Status and prospect of agricultural remote sensing., 2015, 46(2): 247-260. (in Chinese)
[9] 金小俊, 陈勇, 孙艳霞. 农田杂草识别方法研究进展. 农机化研究, 2011, 33(7): 23-27.
JIN X J, CHEN Y, SUN Y X. Research advances of weed identification in agricultural fields., 2011, 33(7): 23-27. (in Chinese)
[10] 毛文华, 张银桥, 王辉, 赵博, 张小超. 杂草信息实时获取技术与设备研究进展. 农业机械学报, 2013, 44(1): 190-195.
MAO W H, ZHANG Y Q, Wang H, ZHAO B, ZHANG X C. Advance techniques and equipments for real-time weed detection., 2013, 44(1): 190-195. (in Chinese)
[11] 邓向武, 齐龙, 马旭, 蒋郁, 陈学深, 刘云海, 陈伟烽. 基于多特征融合和深度置信网络的稻田苗期杂草识别. 农业工程学报, 2018, 34(14): 165-172.
DENG X W, QI L, MA X, JIANG Y, CHEN X S, LIU Y H,CHEN W F. Recognition of weeds at seedling stage in paddy fields using multi-feature fusion and deep belief networks., 2018, 34(14): 165-172. (in Chinese)
[12] 孙俊, 何小飞, 谭文军, 武小红, 沈继峰, 路虎. 空洞卷积结合全局池化的卷积神经网络识别作物幼苗与杂草. 农业工程学报, 2018, 34(11): 159-165.
SUN J, HE X F, TAN W J, WU X H, SHEN J F, LU H. Recognition of crop seedling and weed recognition based on dilated convolution and global pooling in CNN., 2018, 34(11): 159-165. (in Chinese)
[13] 何东健, 乔永亮, 李攀, 高瞻, 李海洋, 唐晶磊. 基于SVM-DS多特征融合的杂草识别. 农业机械学报, 2013, 44(2): 182-187.
HE D J, QIAO Y L, LI P, GAO Z, LI H Y, TANG J L. Weed recognition based on SVM-DS multi-feature fusion., 2013, 44(2): 182-187. (in Chinese)
[14] 潘冉冉, 骆一凡, 王昌, 张初, 何勇, 冯雷. 高光谱成像的油菜和杂草分类方法. 光谱学与光谱分析, 2017, 37(11): 3567-3572.
PAN R R, LUO Y F, WANG C, ZHANG C, HE Y, FENG L. Classifications of oilseed rape and weeds based on hyperspectral imaging., 2017, 37(11): 3567-3572. (in Chinese)
[15] 王海华, 朱梦婷, 李莉, 王丽燕, 赵海英, 梅树立. 基于剪切波变换和无人机麦田图像的区域杂草识别方法. 农业工程学报, 2017, 33(S1): 99-106.
WANG H H, ZHU M T, LI L, WANG L Y, ZHAO H Y, MEI S L. Regional weed identification method from wheat field based on unmanned aerial vehicle image and shearlets., 2017, 33(S1): 99-106. (in Chinese)
[16] 肖武, 任河, 吕雪娇, 闫皓月, 孙诗睿. 基于无人机遥感的高潜水位采煤沉陷湿地植被分类. 农业机械学报, 2019, 50(2): 177-186.
XIAO W, REN H, LÜ X J, YAN H Y, SUN S R. Vegetation classification by using UAV remote sensing in coal mining subsidence wetland with high ground-water level., 2019, 50(2): 177-186. (in Chinese)
[17] NOBUYUKI O. A threshold selection method from gray-level histograms., 1979, 1(1): 62-66.
[18] 孙滨峰, 赵红, 陈立才, 舒时富, 叶春, 李艳大. 基于植被指数选择算法和决策树的生态系统识别. 农业机械学报, 2019, 50(6): 194-200.
SUN B F, ZHAO H, CHEN L C, SHU S F, YE C, LI Y D. Identification of ecosystems based on vegetation indices selection algorithm and decision tree., 2019, 50(6): 194-200. (in Chinese)
[19] 刘畅, 杨贵军, 李振海, 汤伏全, 王健雯, 张春兰, 张丽妍. 融合无人机光谱信息与纹理信息的冬小麦生物量估测. 中国农业科学, 2018, 51(16): 3060-3073.
LIU C, YANG G J, LI Z H, TANG F Q, WANG J W, ZHANG C L, ZHANG L Y. Biomass estimation in winter wheat by UAV spectral information and texture information fusion., 2018, 51(16): 3060-3073. (in Chinese)
[20] Rouse J W, Haas R W, Schell J A, Deering D W, Harlan J C. Monitoring the vernal advancement and retrogradation (Greenwave effect) of natural vegetation Final Rep. RSC 1978-4.Remote Sensing Center, Texas A&M UniversityCollege Station, 1974.
[21] Jordan C F. Derivation of leaf-area index from quality of light on the forest floor., 1969, 50: 663-666.
[22] Pearson R L, Miller L D. Remote mapping of standing crop biomass for estimation of the productivity of the short-grass prairie..Environmental Research Institute of MichiganAnn Arbor, MI, USA, 1972: 1357-1381.
[23] Huete A R. A soil-adjusted vegetation index (SAVI)., 1988, 25: 295-309.
[24] Rondeaux G, Steven M, Baret F. Optimization of soil- adjusted vegetation indices., 1996, 55: 95-107.
[25] Gitelson A A, Kaufman Y J, Merzlyak M N. Use of a green channel in remote sensing of global vegetation from EOS- MODIS., 1996, 58: 289-298.
[26] Huete A, Didan K, Miura T, Rodriguez E P, Gao X, Ferreira L G. Overview of the radiometric and biophysical performance of the MODIS vegetation indices., 2002, 83: 195-213.
[27] 周志华. 机器学习. 北京: 清华大学出版社, 2017.
ZHOU Z H.. Beijing: Tsinghua University Press, 2017. (in Chinese)
[28] 李慧, 祁力钧, 张建华, 冀荣华. 基于PCA-SVM的棉花出苗期杂草类型识别. 农业机械学报, 2012, 43(9): 184-189, 196.
LI H, QI L J, ZHANG J H, JI R H. Recognition of weed during cotton emergence based on principal component analysis and support vector machine., 2012, 43(9): 184-189, 196. (in Chinese)
[29] 李俊秀, 姜三平. 基于主成分分析的图像自适应阈值去噪算法. 红外技术, 2014, 36(4): 311-314, 319.
LI J X, JIANG S P. Adaptive threshold image denoising algorithm based on principal component analysis., 2014, 36(4): 311-314, 319. (in Chinese)
[30] HARALICK R M, SHANMUGAM K. Textural features for image classification., 1973, 3(6): 610-621.
[31] 吴文涵, 陶华敏, 肖山竹,汤朋文. 灰度共生矩阵纹理特征提取算法的优化与实现. 数字技术与应用, 2015(6): 124-126.
WU W H, TAO H M, XIAO S Z, TANG P W. Optimization and implementation of texture feature extraction algorithm for gray level co-occurrence matrix., 2015(6): 124-126. (in Chinese)
[32] 韩文霆, 孙瑜, 徐腾飞, 陈香维, Su K O. 基于RGB图像处理的玉米叶片含水率监测方法研究. 农业工程技术, 2016, 36(12): 75.
HAN W T, SUN Y, XU T F, CHEN X W, SU K O. Detecting maize leaf water status by using digital RGB images., 2016, 36(12): 75. (in Chinese)
[33] 侯群群, 王飞, 严丽. 基于灰度共生矩阵的彩色遥感图像纹理特征提取. 国土资源遥感, 2013, 25(4): 26-32.
HOU Q Q, WANG F, YAN L. Extraction of color image texture feature based on gray-level co-occurrence matrix., 2013, 25(4): 26-32. (in Chinese)
[34] 韩文霆, 李广, 苑梦婵, 张立元, 师志强. 基于无人机遥感技术的玉米种植信息提取方法研究. 农业机械学报, 2017, 48(1): 139-147.
HAN W T, LI G, YUAN M C, ZHANG L Y, SHI Z Q. Extraction method of maize planting information based on UAV remote sensing technology., 2017, 48(1): 139-147. (in Chinese)
[35] 黄晓娟, 张莉. 改进的多类支持向量机递归特征消除在癌症多分类中的应用. 计算机应用, 2015, 35(10): 2798-2802.
HUANG X J, ZHANG L. Modified multi-class support vector machine recursive feature elimination for cancer multi-classification., 2015, 35(10): 2798-2802. (in Chinese)
[36] 王君. 基于SVM-RFE的特征选择方法研究[D]. 大连: 大连理工大学, 2015.
WANG J. The research of feature selection algorithm based on SVM- RFE[D]. Dalian: Dalian University of Technology, 2015. (in Chinese)
[37] 蒋玉娇, 王晓丹, 王文军, 毕凯. 一种基于PCA和ReliefF的特征选择方法. 计算机工程与应用, 2010, 46(26): 170-172.
JIANG Y J, WANG X D, WANG W J, BI K. New feature selection approach by PCA and ReliefF., 2010, 46(26): 170-172. (in Chinese)
[38] 戴建国, 张国顺, 郭鹏, 曾窕俊, 崔美娜, 薛金利. 基于无人机遥感可见光影像的北疆主要农作物分类方法. 农业工程学报, 2018, 34(18): 122-129.
DAI J G, ZHANG G S, GUO P, ZENG T J, CUI M N, XUE J L. Classification method of main crops in northern Xinjiang based on UAV visible waveband images., 2018, 34(18): 122-129. (in Chinese)
Weed Identification in Maize Field Based on Multi-Spectral emote Sensing of Unmanned Aerial Vehicle
ZHAO Jing1,2, LI ZhiMing1,2, LU LiQun2,3, JIA Peng1,2, YANG HuanBo1,2, LAN YuBin1,2
(1School of Agricultural Engineering and Food Science, Shandong University of Technology, Zibo 255000, Shandong;2International Research center of Precision Agriculture Aviation Application Technology, Shandong University of Technology, Zibo 255000, Shandong;3School of Transportation and Vehicle Engineering, Shandong University of Technology, Zibo 255000, Shandong)
【Objective】In order to reduce the application rate of herbicides and to make the maize planting management more effective, the accurate identification of weeds in maize fields was investigated based on multi-spectral remote sensing of unmanned aerial vehicles (UAV). 【Method】In this paper, a Red Edge-M multi-spectral camera was mounted in a six-rotor UAV to acquire five single-band images of blue, green, red, red edge, and near-infrared, and the application was taken in Zibo, Shandong province, China to acquire multi-spectral images of a maize field in July 14, 2018. In order to separate the vegetation and non-vegetation pixels in the image, 7 vegetation indices were calculated, the OTSU method was used to obtain the non-vegetation area, and the multi-spectral image was masked. Then multi-spectral image was transformed by principal component analysis, retaining the first three principal component bands with the most information. The experimental region was divided into 3 training areas and 1 verification area. 675 maize and 525 weed samples were selected in the training areas to train the supervised classification model, and 240 maize and 160 weed samples were selected in the verification area to evaluate model classification accuracy. The 7 vegetation indices, 24 texture features of the 3 principal component bands and 10 reflectivity of multi-spectral image bands which were filtered, and a total of 41 features were taken as features of maize and weed. Support vector machines-feature recursive elimination (SVM-RFE) algorithm and Relief algorithm were applied to selecting 14 features from 41 features to constitutes a feature subset separately, and supervised classification for weed detection was performed using support vector machine (SVM), K-nearest neighbor (KNN), Cart decision tree (Cart), random forest (RF) and artificial neural network (ANN) .【Result】SVM and RF performed a better classification with all features and SVM-RFE & Relief feature subsets. The overall accuracy of SVM was 89.13%-91.94%, Kappa>0.79, and overall accuracy of random forest was 89.27%-90.95%, Kappa>0.79.【Conclusion】SVM-RFE feature selection algorithm was better than the Relief feature algorithm for reducing the original features. SVM model had the highest classification accuracy for identification of weed and maize at regional canopy scales.
weed identification; UAV remote sensing; multi-spectral image; feature selection; supervised classification
2019-08-29;
2019-11-04
山东省引进顶尖人才“一事一议”专项经费资助项目、中央引导地方科技发展专项资金“精准农业航空技术与装备研发”资助项目
赵静,E-mail:zbceozj@163.com。通信作者兰玉彬,E-mail:ylan@sdut.edu.cn
(责任编辑 杨鑫浩)