末端执行器法兰盘的动态及模态谐响应分析
2020-08-14刘维柱陈顶明
刘维柱 陈顶明
摘 要:针对机械手上的重要零部件末端执行器法兰盘工作过程中容易受到振动破坏的特性,由于其结构刚度和强度对机械手的精度有很大影响,为提高其刚度和强度。应用Creo 2.0软件对机械手末端执行器法兰进行建模,并使用ANSYS Workbench软件对其进行有限元网格划分、静态特性分析、模态分析和谐响应分析。基于有限元分析结果,使法兰的激振频率远离共振频率,可有效避免工作过程中产生共振,导致设备损坏。
关键词:末端执行器;法兰盘;静态分析;模态分析;谐响应分析
Abstract:Aiming at the characteristic that the end effector flange of the important parts of the manipulator is easily damaged by vibration during work,its structural rigidity and strength have a great influence on the accuracy of the manipulator,so as to improve stiffness and strength. This article uses Creo 2.0 software to model the end effector flange of the manipulator,and uses ANSYS Workbench software to perform finite element meshing,static characteristics analysis,modal analysis and harmonious response analysis. Based on the results of finite element analysis,the excitation frequency of the flange is kept away from the resonance frequency,which can effectively avoid resonance during work and cause damage to the equipment.
Keywords:end effectors;flange;static analysis;modal analysis;harmonic response analysis
0 引 言
ANSYS Workbench拥有强大的有限元前处理能力,在建模、网格划分方面非常方便,在CAE计算方面有很多优点[1]。近年来,一些国内外学者都在用这一软件解决有限元分析的相关问题。韩晓东等[2]利用该程序对变压器油箱的结构参数进行了改进,以达到减轻油箱重量、节省材料的目的。ZRNIC等人[3-5]分析了杠杆的结构方法以获得结构的固有特性,这为产品设计和改进提供了基础。查太东等[6]在ANSYS Workbench的基础上改进了静态支撑,使支撑可以满足最大压力、变形和质量方面的设计要求。曹光光等人[7]采用ANSYS Workbench分析平台中钢板弹簧的力学性能,与实验数据的结果相一致,从而表明该方法的计算精度很高。金嘉琦等人[8]采用Workbench分析了搬运机器人的最大变形和最大应力当量。范炳辉等人[9]采用缸筒框架代替机械手的原始结构,以实现最大的变形和张力,对Workbench平台上排爆机器人处理器的结构进行了静态分析。本文基于校内的高校创客实验室建设探索项目,采用ANSYS对机械手末端执行器法兰的变形进行了静态、模态分析和谐响应分析研究,有望为后期机械手的教学设计优化提供理论支持。
1 机械手与法兰结构
随着社会工业领域的进步与发展,自动化生产进程已经逐步形成,工业自动化生产线开始大规模使用,并在未来一直呈现上升趋势。机械手是在自动化生产过程中发展起来的一种新型装置,广泛用于自动生产线中,代替人的繁重劳动以实现生产的机械化和自动化,有助于改善工人的工作条件,降低生产成本,并增强企业的竞争力。机械手的研制和生产已成为高技术领域[10]。末端执行器法兰是处理器的重要组成部分,它可以连接到电机和真空吸盘或离合器,并且具有一些小功能,例如螺纹孔、走线孔和定位孔。因此,法兰结构的强度和刚度对机械手的精度有重要影响[11]。本文使用3D Creo 2.0程序绘制末端执行器法兰,并在其边缘上进行线性静态分析,由于一些小的结构特征为非线性特征,所以简化了一些对整体结构性能影响很小的次要特征[12],如图1所示,简化后的3D模型对有限元分析的结果影响较小。
2 静态分析
2.1 有限元模型的建立
将末端执行器法兰盘模型导入ANSYS Workbench 15.0中后,在Static Structural模块Engineer Data选项中进行设定材料属性,法兰材料为铝合金,密度为2.77×103 kg/m3,弹性模量为71 GPa,泊松比为0.33,则法兰的总质量为0.108 2 kg。为减小电脑计算时间和存储效率,采用六面体网格,相关性设置为100,进行网格划分。网格划分时要综合考虑计算精度和网格数量这两个因素。對螺纹孔连接位置的网格进行细化,得出最优有限元模型,机械臂和固定在边缘螺纹孔上的材料的重力可以转换为垂直压力载荷,在螺纹孔上的负荷压力为500 N,不同尺寸下六面体网格计算信息对比如表1所示。可见,四组数据的最大应力都满足强度要求,最大位移满足刚度要求,考虑有限元模型计算时间、占用内存与精度等三个方面,确定选用网格尺寸为3 mm,单元数为14 098,节点数为43 556的有限元模型进行后面的分析求解工作,法兰有限元网格如图2所示。
2.2 静态模型分析
法兰的底板通过螺钉固定在主轴的基座上,伺服电机位于主轴支架内部,直接驱动机械手。在有限元分析中,由于该约束作用在边缘上,所以为了便于计算和分析,可以简化绕弧的外部强度。弧形处理器底板的稳定支撑可以简化为固定支撑约束。螺纹孔可承受机械臂本身的压力负荷和固定材料的重力,负荷为500 N。
在ANSYS Workbench中,静力分析常用于计算由那些不包括惯性和阻尼效应的载荷作用于结构或部件上引起的位移、应力、应变和力。假定载荷和结构响应随时间的变化非常缓慢。静力分析方程为:
将末端执行器法兰盘的有限元模型导入到Static Structural模块,通过静力学分析对法兰盘施加相应的力和约束,法兰等效应力云图和总变形云图如图3所示。可见,法兰上端螺纹孔处产生最大等效应力,其值为3.603 MPa,该处存在最大变形,其值为0.000 505 mm。通过静力学分析可知,当安全系数S取1.5时,法兰的许用应力为310.000 MPa,结果表明法兰的最大等效应力远小于其许用应力,在使用过程中,法兰变形量比较小,不会对机械手的结构精度产生较大的影响。法兰选用的材料既要满足强度设计也要满足刚度公式的要求[13]。
3 模态分析
将末端执行器法兰盘模型导入ANSYS Workbench 15.0中后,在Static Structural模块Engineer Data选项中设定材料属性,法兰材料为铝合金,实际工作中法兰会产生弯曲变形、疲劳断裂和剧烈振动。因此,仅对法兰盘进行静力学分析尚无法满足机械手刚度和强度的设计要求。研究表明,采用有限元进行模态分析和谐响应分析,评估法兰盘动态性能,明确其薄弱部位,有望为进一步优化改进优化机械手结构提供理论指导[14,15]。根据机械振动方程,对法兰建立振动微分方程[16]:
式中,[M]、[C]和[K]分别为法兰质量矩阵、阻尼矩阵和刚度矩阵;{F}为外部激励载荷向量;{X}、 和 分别为法兰的位移向量、速度向量和加速度向量。
由于模态为法兰的固有特征,所以在模态分析时,阻尼[C]和外部激励载荷{F}可忽略不计,则式(2)可简化为:
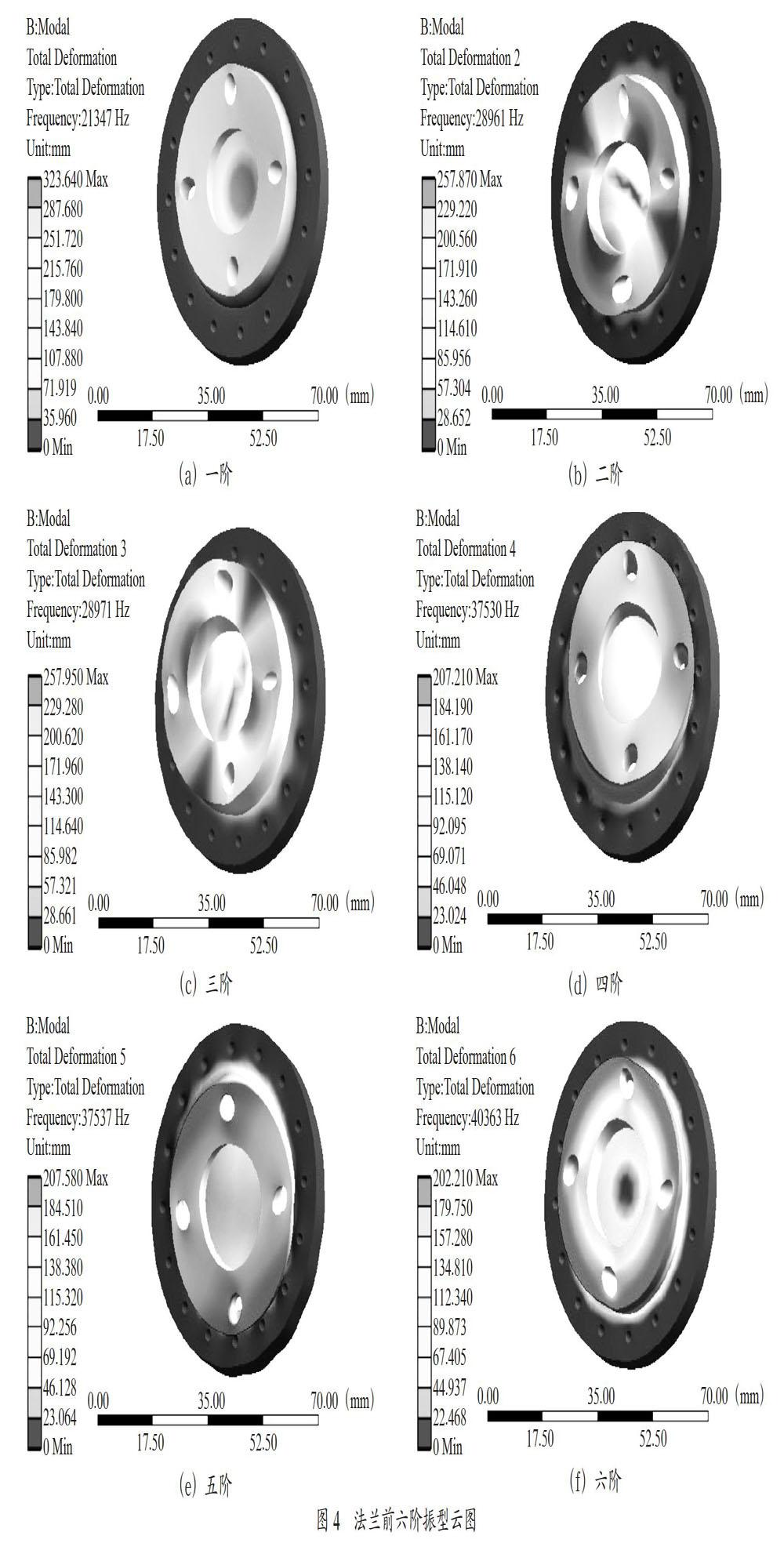
将法兰盘模型导入Modal模块中,进行相应的设置和求解,得到法兰前六阶振型,如图4所示。
可见,法兰第一阶固有频率为21 347 Hz,下端向内侧弯曲变形,螺纹孔处变形量较大;第二阶固有频率为28 961 Hz,上端向上侧弯曲变形,螺纹孔处变形量较大;第三阶固有频率为28 971 Hz,中部向外侧对称弯曲变形,螺纹孔处向内侧弯曲变形;第四阶固有频率为37 530 Hz,上端向上侧弯曲变形,螺纹孔处变形量较大;第五阶固有频率为37 537 Hz,上端向左侧弯曲变形,螺纹孔处变形量较大;第六阶固有频率为40 363 Hz,上端向内侧弯曲变形,螺纹孔处变形量较大。现有机械手的振动频率为35 Hz,而法兰的一阶固有频率为21 347 Hz,远大于机械手的振动频率,因此法兰的结构能够避免与机械手发生共振,满足动态特性的要求。在避免法兰与机械手发生共振的同时,由于机械手微振动,末端执行器螺纹连接部位会形成振动力,因此需要对法兰进行谐响应分析,计算法兰在不同频率下的刚度和强度。
4 谐响应分析
谐响应分析可用于确定系统中结构的稳态响应共振,从而避免结构的共振,并确保结构可以在不同频率的简谐负载下正常运行[17]。分析过程中只计算结构的稳态受迫振动,不考虑激振开始时的瞬态振动。从条件分析的结果可以看出,在处理器运行时,法兰的顶部是承受最大外部激励载荷的部分,变形也最大。其在简谐运动中受迫振动的微分方程为:
将法兰有限元模型导入Harmonic Response模块中,计算法兰结构变形和激励频率之间的关系曲线。结果表明,法兰盘第六阶固有频率须大于励磁频率范围内最大值的1.5倍[18]。
图4为法兰翻转90°时前六阶振型云图,由图可见,在第二、三阶和第四、五阶固有频率处,分别对应法兰结构变形与频率关系的最低值28 000 Hz和38 000 Hz。在第一阶固有频率处出现了最大峰值21 500 Hz。分析结果表明法兰在第一阶固有频率处容易引起共振。通过对末端执行器法兰的静力学分析、模态分析以及谐响应分析,结果表明均能满足使用要求,考虑铝合金材料质量较轻,结构简单对称,无需再对法兰进行六西格玛结构分析(Six Sigma Analysis)。
5 结 论
本文对机械手末端执行器法兰进行了建模,并在ANSYS Workbench中对其进行了静力学、模态和谐响应分析。通过静态法兰分析,得出最大应力变形为3.39 MPa,远小于选取材料的许用应力,最大变形量为0.000 506 mm,分析发现两者之间相邻的固有频率差较小,且在第一阶固有频率处产生共振现象。通过对法兰的谐响应分析,得到法兰在不同激振频率的动载荷作用下发生的共振频率,为后期机械手的优化设计提供了强有力的理论引导。
参考文献:
[1] 曾锐,平丽浩.基于Workbench的多学科仿真分析平台开发 [C]//中国电子学会电子机械工程分会2007年机械电子学学术会议.中国电子学会电子机械工程分会2007年机械电子学学术会议论文集.中国云南昆明:电子工业出版社,2007:29-36.
[2] 韩晓东,王革鹏,高飞,等.基于ANSYS Workbench的變压器油箱优化设计 [J].高压电器,2014,50(8):110-114.
[3] PARK K P,CHA J H,LEE K Y. Dynamic factor analysis considering elastic boom effects in heavy lifting operations [J].ocean engineering,2011,38(10):1100-1113.
[4] ZRNIC N D,GASIC V M,BONSJAK S M. Dynamic responses of a gantry crane system due to a moving body considered as moving oscillator [J]. Archives of Civil & Mechanical Engineering,2015,15(1):243-250.
[5] XIANG Z Y,XIAO Z M,WANG X,et al. Dynamic analysis of the main trolley frame in load-lifting system of casting crane [C]//IEEE 2015 IEEE International Conference on Information and Automation,Lijiang,2015:1816-1820.
[6] 查太東,杨萍.基于Ansys Workbench的固定支架优化设计 [J].煤矿机械,2012,33(2):28-30.
[7] 曹光光,王东华,邓亚东,等.基于Workbench的钢板弹簧力学性能分析 [J].工程机械与维修,2015(S1):152-157.
[8] 金嘉琦,徐振伟,刘畅,等.基于Workbench与ADAMS直角坐标搬运机器人静力学分析及动态仿真 [J]. 机械工程师,2016(12):20-22.
[9] 樊炳辉,焦浩,贾娜.基于Ansys WorkBench的排爆机器人机械手静力学分析 [J].制造业自动化,2014,36(4):34-36.
[10] 吴成军.工程振动与控制 [M].西安:西安交通大学出版社,2008.
[11] 黄建建,马平,陈爱民,等.基于PolyMAX方法的加工中心工作台计算模态与实验模态对比分析 [J].机床与液压,2010,38(23):91-96.
[12] 刘鑫,张祥林,冯科.基于ANSYS Workbench的冲压机械手机座优化设计 [J].机械制造与自动化,2014,43(6):197-200.
[13] 虞鹏,鲁健武,杨超君,等.冲压机械手机身的静力学及模态分析 [J].机械设计与制造工程,2017,46(10):20-23.
[14] 李发宗,童水光,王相兵.基于模态分析的液压挖掘机工作装置动态优化设计 [J].农业机械学报,2014,45(4):28-36.
[15] 何求,董皓,张君安.轮毂驱动智能车车架的有限元分析 [J].机械制造,2016,54(10):40-43.
[16] RAO S S.机械振动:第4版 [M].李欣业,张明路,译.北京:清华大学出版社,2009.
[17] 宫文峰,黄美发,张美玲,等.基于ANSYS Workbench的倒装键合机钣金件模态分析与实验 [J].机械设计,2014,31(8):101-105.
[18] 许进峰.ANSYS Workbench 15.0完全自学一本通 [M].北京:电子工业出版社,2014.
作者简介:刘维柱(1965—),男,汉族,安徽淮南人,计算机工程师,本科,主要研究方向:智能信息处理、机器学习、仿真。
