不确定环境下无人机区域目标搜索及载荷参数影响
2020-08-14吴岸平侯中喜鲁亚飞
吴岸平,郭 正,侯中喜,鲁亚飞
(1. 国防科技大学 空天科学学院, 湖南 长沙 410073; 2. 中国空气动力研究与发展中心 超高速空气动力研究所, 四川 绵阳 621000)
无人机(Unmanned Aerial Vehicles, UAV)以其成本低、零人员伤亡、隐蔽性好等特点,在现代战争中被广泛使用。侦察和搜索是目前无人机系统最主要的作战任务,采用无人机对作战区域进行目标搜索和情报侦察已经成为战场信息获取的重要手段[1-3]。
通常无人机在执行搜索任务之前,对任务区域的信息知之甚少,除给定的任务区域地理位置和区域大小外,对搜索目标的位置分布和数量信息并不确定,这就决定了无人机在搜索过程中必须根据实时的探测结果进行在线路径决策。在无人机平台确定的条件下,区域搜索能力的提升,一方面取决于搜索路径决策,另一方面取决于机载光电载荷参数配置决策。无人机在搜索路径上的探测收益越高,越有利于搜索效率的提升;机载光电载荷视场范围越大,探测范围越大,但相应的分辨率会降低,而视场范围减小能提高分辨率,但相应减小探测范围。
国内外学者针对这两方面问题开展了大量研究。在搜索路径决策方面,文献[4-6]研究了基于模型预测控制理论的多无人机协同区域搜索算法。文献[7]提出了一种基于协同进化算法的多无人机协同区域搜索算法,比遗传算法具有更高的搜索效能。文献[8]提出了一种使用未来路径规划和过去路径分享的方法,提高了有通信距离限制下多无人机协同搜索移动目标时的效能。文献[9]提出了一种基于改进概率图的多无人机协同搜索策略,采用基于Agent的仿真模型分析了通信条件和目标特性对协同策略的影响。文献[10]提出了一种带信息素回访机制的多无人机协同目标搜索方法,使用蒙特卡洛方法验证了无人机数量、光电载荷探测靶面半径、光电载荷性能对搜索效率的影响。文献[11]设计了一种基于一致性的信息融合策略和基于多旅行商问题求解的搜索路径规划方法,提高了多机协同搜索的效率。文献[12]采用改进快速扩展随机树(Rapid-exploring Random Tree, RRT)的UAV实时搜索航迹规划算法,提高了航迹规划效率。在机载光电载荷参数配置决策方面,文献[13]构建了光电载荷对海面目标收容能力分析模型,给出了光电载荷的理论“搜参”范围,并根据海面分辨力计算模型得到针对不同海面目标的实用“搜参”范围。文献[14]提出了红外搜索与跟踪(Infrared Search and Track, IRST)系统探测性能评定的方法,研究了目标发现概率与系统作用距离以及载机速度之间的关系。
国内外研究对不确定环境下的无人机协同搜索方法进行了积极探索,但针对机载光电载荷探测结果的不确定性对搜索效能的影响研究较少,如何选择机载光电载荷视场范围以提升搜索效能是亟待解决的实际问题。针对该问题,本文建立了基于概率网格地图的无人机区域搜索模型,以发现目标和降低任务区域不确定度为搜索性能指标,采用粒子群算法对搜索路径进行滚动优化以完成路径决策;通过机载光电载荷视场范围与探测概率关系模型,结合概率地图更新机理,分析得到区域搜索最佳探测概率及对应的视场范围,并使用蒙特卡洛方法进行了对比仿真验证。
1 不确定环境下区域搜索建模
使用无人机对某一特定任务区域进行侦察搜索,任务想定如图1所示,由于目标的位置分布和数量信息具有不确定性,光电载荷的探测结果也存在着随机性,因此必须实时获取和更新目标信息。采用合理的搜索决策方法和光电载荷参数配置,是保证无人机在尽可能短的时间内降低任务区域的不确定度,并发现尽可能多的目标的关键。
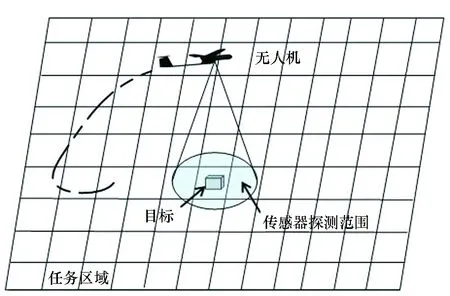
图1 无人机区域搜索任务示意图Fig.1 UAV area target search scenario
搜索问题建模是进行任务决策的基础,概率图模型是图论和概率论按特定方式相结合的成果,是用来处理不确定性数据和知识的主流方法[15]。本文采用二维离散的网格概率地图来描述无人机对当前目标和环境信息的认知,并通过实时更新来反映搜索的动态过程。
1.1 概率地图建模与更新
将任务区域划分为Lx×Ly的离散网格,并将网格按顺序进行编号,ci,j表示任务区域中第i行第j列的网格。网格c中有没有目标的客观事实用ωc表示,1代表目标位于网格中,0代表目标不在网格中。无人机对网格c的探测结果用ξc表示,1代表在网格中发现目标,0代表在网格中未发现目标。
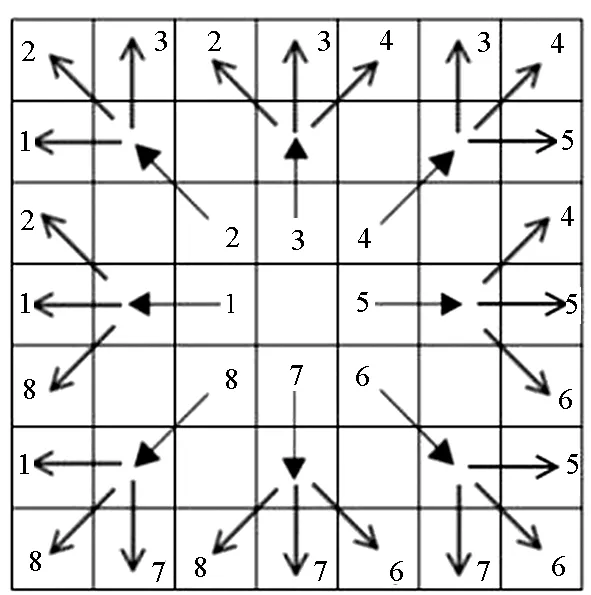
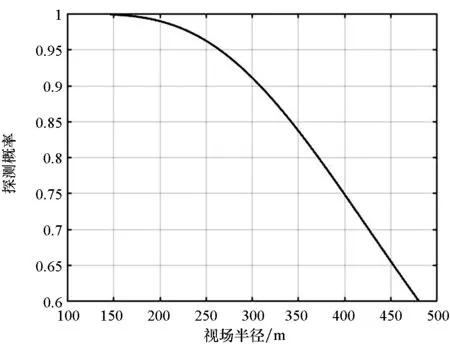
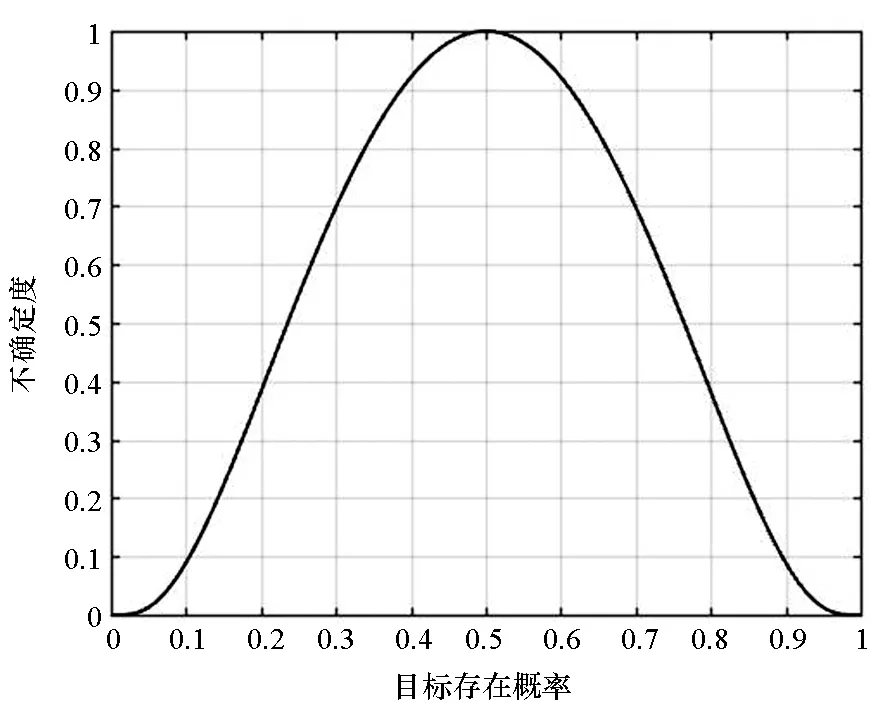
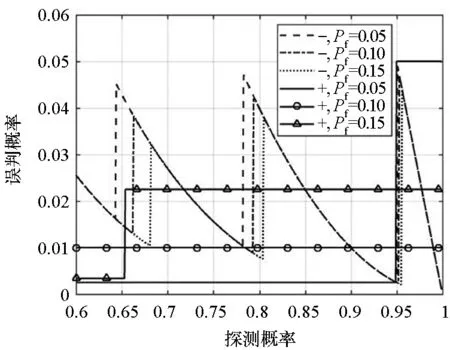
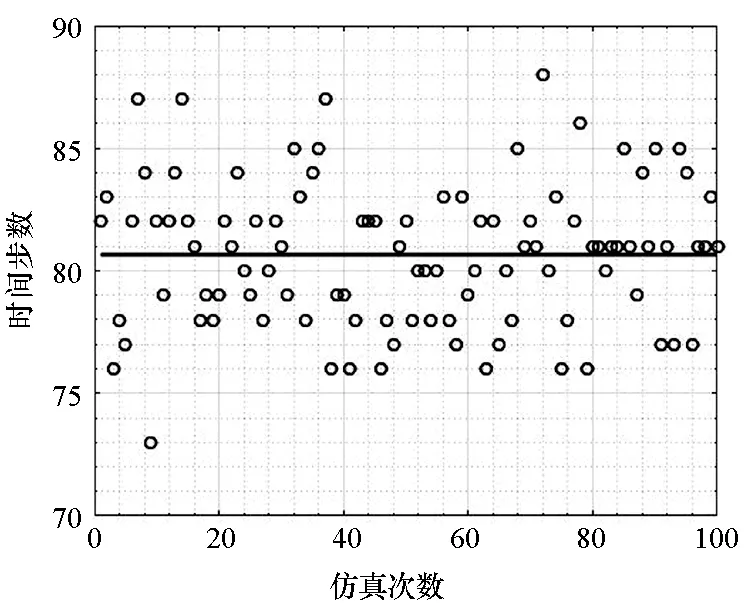
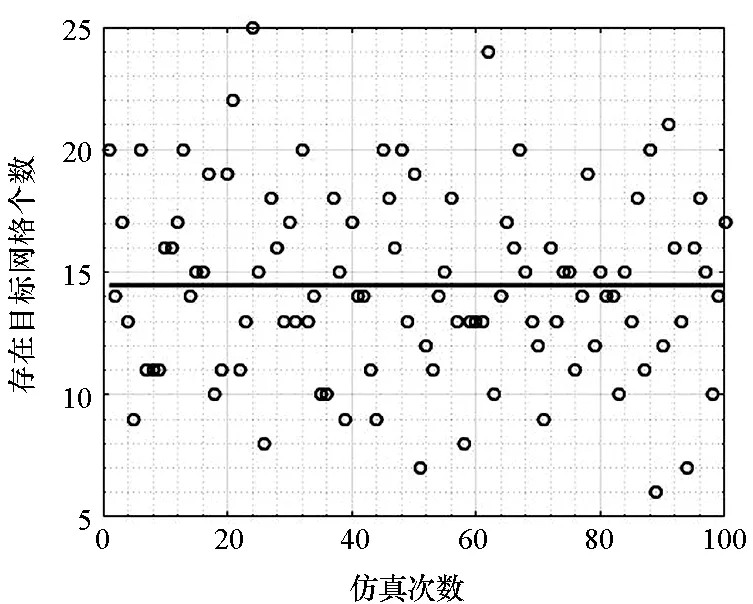
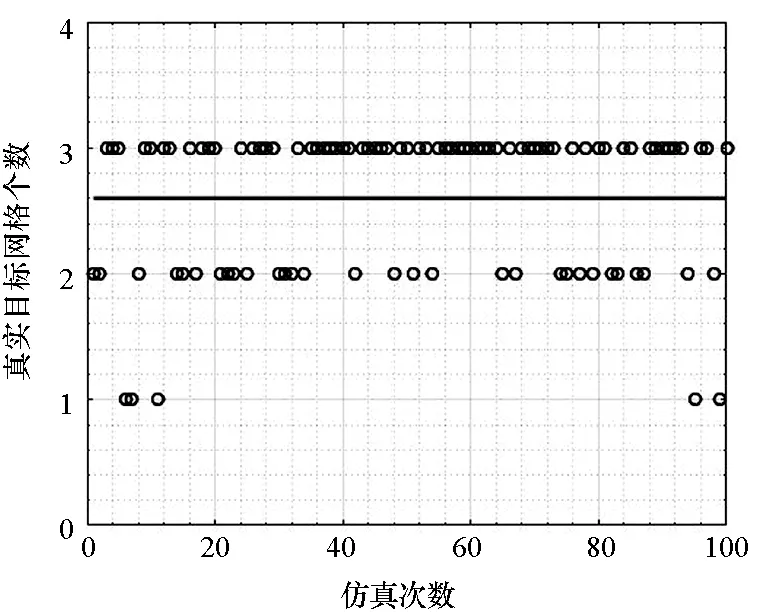
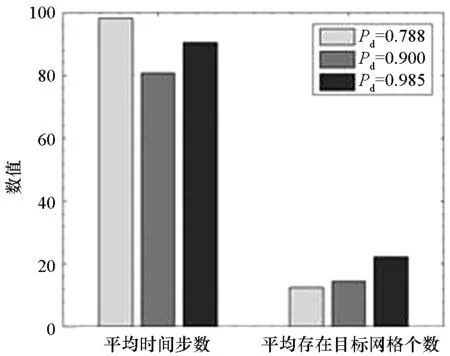
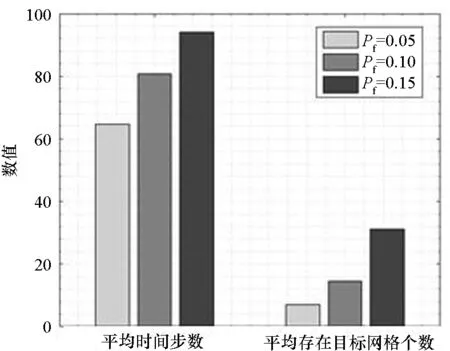
无人机载光电载荷的探测概率用Pd表示,即Pd=P(ξ=1|ω=1);虚警概率用Pf表示,即Pf=P(ξ=1|ω=0),且一般情况下探测概率与虚警概率满足0 Pc(k)= (1) 无人机在执行侦察任务时,通常只考虑等高飞行的航迹问题,把无人机视作二维空间运动的质点,用网格编号和航向角的变化来反映无人机的运动过程,k时刻无人机的状态为(i(k),j(k),ψ(k)),受无人机平台的飞行性能约束,在k+1时刻无人机的航向只能在k时刻航向的基础上左转45°、直行或右转45°,则无人机航向角满足: (2) 无人机k+1时刻的位置变化可以根据航向角进行求解,8个航向角所对应的无人机位置变化如图2所示,其中“→”为k时刻的航向,“→”为k+1时刻的航向。 图2 无人机航向对应的位置变化图Fig.2 Illustration of possible orientation and location 光电载荷探测模型描述了无人机对搜索目标的探测与发现关系,一般采用探测概率Pd、虚警概率Pf、探测范围ds和探测距离Rs等来综合表达。这里考虑竖直向下固定安装的光电载荷,由光学成像原理可知,目标在机载光电载荷成像面上的成像大小δ为: (3) 式中,f为光电载荷焦距,dc为目标的特征尺寸。由此,可计算出目标在光电载荷成像靶面上覆盖目标临界尺寸的线对数N为: (4) 式中,b为光电载荷的靶面成像尺寸,βs为光电载荷垂直视场角,Ns为光电载荷的行扫描线数。 对于特定目标的识别,目前已建立了所需目标分辨率的经验规则,最常用的是Johnson准则,它给出了特定目标在图像中被发现、定向、识别和确认所需的经验数据,根据数据表可以反向推导出目标传递概率函数的计算公式[16]。 (5) 取机载光电载荷行扫描线数Ns=1080,发现目标的最小维方向分辨率N50=1.0,则机载光电载荷针对特征尺寸为1 m的目标,视场范围与探测概率之间的关系如图3所示。 图3 视场范围与探测概率关系图Fig.3 Relationship between field range and detection probability 为提高无人机的搜索效率,性能指标函数的建立和优化算法的选择非常关键。引入不确定度概念,建立包含不确定度指标以及对探测结果为发现目标的网格重访和网格探测次数控制的搜索性能指标函数,选择优化效率较高的粒子群算法进行搜索航迹规划,以提高搜索效率。 无人机在进行搜索探测时,网格内大概率存在目标和大概率不存在目标都是所期望的结果,而两者概率相近时则需要继续探测加以甄别。为描述这种探测需求,引入不确定度概念。 (6) 目标存在概率Pc(k)与不确定度Wc(k)的对应关系如图4所示。当网格c内目标存在概率为0.5时,存在目标和不存在目标的可能性相等,不确定度最大;当网格c内目标存在概率为0或1时,目标是否存在的确定性最强,不确定度为0。 图4 目标存在概率与不确定度对应关系Fig.4 Relationship between field range and detection probability 无人机进行搜索决策时主要考虑两方面内容:一是尽可能探测不确定度较高的区域;二是当上一次探测结果为发现目标时尽可能进行重访确认。因此,搜索性能指标函数定义为: (7) 针对无人机不确定环境下的区域搜索问题,搜索路径的实时决策是解决问题的关键,这就要求搜索算法在保证效率的同时提高航路生成速率。粒子群算法是一种模拟鸟群捕食行为的生物进化算法,常用于解决复杂的非线性问题,具有简单易实现、优化效果较好等优点,本文采用粒子群算法对搜索路径进行优化。 根据1.2节所述的无人机运动模型,对每一步飞行决策进行编码,构造解空间(0,1,-1,0,…),其中-1代表左转,0代表直行,1代表右转。粒子群进行位置和速度的更新后,新产生的解向量各分量可能不再是{-1,0,1},而是其他实数,需经式(8)所示关系对解进行规范化,将其转化为合理解向量。 (8) 采用2.1节中所述的搜索性能指标函数对解向量进行评价,经迭代更新后得到最优搜索路径,并根据探测结果对概率地图进行更新,滚动优化直至任务区域不确定度达到指标要求。 合理的机载光电载荷参数配置能大大提高区域搜索效率,通过对单个网格内是否存在目标所需的平均探测次数估计、任务区域平均探测步数估计和误判概率估计的分析,优化出最合理的光电载荷参数配置,以提升搜索效率。 (9) 无人机单次探测结果是独立同分布的,根据大数定律,随着探测次数mξ→+∞,若网格内存在目标,则探测结果为发现目标的次数为mξ·Pd,未发现目标的次数为mξ·(1-Pd)。由概率更新公式可得: (10) 当网格内目标存在概率大于Pmax时,可认为该网格内存在目标,所需的平均探测次数估计公式为: (11) 同理可得网格内不存在目标时,达到判断标准所需的平均探测次数估计公式为: (12) 无人机对任务区域没有先验信息的条件下,Pc(0)=0.5,取Pmax=0.95,Pmin=0.05,得到机载光电载荷探测概率与单个网格平均探测次数之间的关系如图5所示。随着探测概率增加和虚警概率降低,所需的平均探测次数逐渐减少,且确认网格内存在目标所需的平均探测次数的减少速率小于不存在目标的平均探测次数。 图5 探测概率与单个网格平均探测次数关系图Fig.5 Relationship between detection probability and detection times of single grid (13) 取15 km×15 km任务区域为例,根据光电载荷视场范围与探测概率之间的对应关系,可得探测概率与任务区域平均探测步数的关系如图6所示。 图6 探测概率与任务区域平均探测步数关系图Fig.6 Relationship between detection probability and detection steps of search area 可以看出,随着探测概率的增大,确认任务区域内目标存在所需的平均探测步数先减少后增加,存在一个最优的探测概率,且最优探测概率随着虚警概率的减小而减小;确认任务区域内目标不存在所需的平均探测步数随探测概率的增大而减小;降低光电载荷虚警概率有利于减少平均探测步数。 图7 探测概率与误判概率关系图Fig.7 Relationship between detection probability and misjudgement probability 由图7可知,随着探测概率的增大,探测误判概率呈周期性递减,中间产生阶跃的原因是探测概率增大导致形成误判所需的探测次数减少,虚警概率的减小会增大探测误判概率的极值;判断网格内是否存在目标所需的探测次数相同时,虚警误判概率随虚警概率的增大而增大,探测概率过大时,所需探测步数减少,虚警误判概率反而会增加。 取15 km×15 km任务区域,在其中设置3个目标,采用蒙特卡洛方法分别验证采用最佳光电载荷参数配置时的目标搜索能力和探测概率、虚警概率对搜索效率的影响。 取机载光电载荷虚警概率Pf=0.1,综合3.2节和3.3节分析结果,最优的探测概率Pd=0.90,此时对应的机载光电载荷视场范围半径为308 m,按照441 m×441 m规格将整个任务区域划分为34×34个正方形网格,在此条件下无人机运动一个网格步长转弯45°对应的转弯半径为1100 m左右,满足小型无人机飞行的最小转弯半径要求。采用基于粒子群算法的搜索方法对搜索路径进行优化,为便于后续对比,取每个时间步长内无人机运行34个网格,当任务区域平均不确定度小于0.1时结束搜索。 采用蒙特卡洛法的思想随机生成目标所在的网格位置,进行100次仿真,将任务区域平均不确定度降低到0.1所需的时间步数如图8所示,平均时间步数为81;探测结果为存在目标的网格个数如图9所示,平均有14.6个网格探测结果为存在目标,扣除真实存在目标的网格,误判率为1%;发现真实存在目标的网格个数如图10所示,平均能发现2.6个真实目标,继续降低结束搜索的不确定度约束,能进一步提升发现真实目标的个数。 图8 最优探测概率对应的时间步数Fig.8 Detection steps under optimal detection probability 图9 最优探测概率对应的存在目标网格个数Fig.9 Number of grids with detected target inside under optimal detection probability 图10 最优探测概率对应的真实目标网格个数Fig.10 Number of grids with real target inside under optimal detection probability 作为对比,在相同虚警概率Pf=0.1条件下,分别取探测概率Pd=0.788、Pd=0.900和Pd=0.985进行100次蒙特卡洛仿真,Pd=0.900对应的任务区域网格个数和每个网格大小与4.1节描述相同;Pd=0.788对应的任务区域网格个数为28×28,每个网格大小为536 m×536 m;Pd=0.985对应的任务区域网格个数为50×50,每个网格大小为300 m×300 m。 图11 不同探测概率搜索性能对比Fig.11 Effect of different detection probability on search efficiency 仿真结果如图11所示。可以看出,Pd=0.900所对应的平均时间步数最少,即相同无人机平台条件下机载光电载荷视场范围半径为308 m时搜索效率最高,平均时间步数随探测概率增大而先减小后增大的趋势符合3.2节任务区域平均探测次数估计;平均存在目标网格个数随探测概率的增大而增加,但同时任务区域的网格总数也在增加,虚警误判概率在1%附近波动,且随探测概率的增大而减小。 为验证虚警概率对搜索效率的影响,在相同探测概率Pd=0.900的条件下,分别取虚警概率Pf=0.05、Pf=0.10和Pf=0.15进行100次蒙特卡洛仿真,任务区域网格个数为34×34,每个网格大小为441 m×441 m。 仿真结果如图12所示。可以看出,平均时间步数和平均存在目标网格个数都随虚警概率的增大而增加,即在Pd=0.900条件下,搜索效率随虚警概率的增加而降低,虚警误判概率随虚警概率的增加而增大,与3.2节和3.3节中的估计相符。 图12 不同虚警概率搜索性能对比Fig.12 Effect of different false alarm probability on search efficiency 本文采用基于概率地图的无人机区域搜索模型和基于粒子群算法的搜索路径滚动优化方法,解决了无人机不确定环境下实时探测更新的区域搜索问题;通过对任务区域平均探测时间步数和误判概率的估计分析和仿真验证,得到了机载光电载荷参数优化配置策略,形成了如下结论: 1)无人机搜索效率随虚警概率的减小而增加,但随探测概率的增大而先降低后增加,存在最优探测概率及其对应的光电载荷视场范围; 2)无人机搜索误判概率在一定范围内随虚警概率的减小而减小,但随着探测概率的增大会因所需的探测次数减少而产生向上跃升; 3)无人机机载光电载荷参数的合理配置能有效提高搜索效率和降低搜索误判概率,经蒙特卡洛方法仿真验证,所述策略能有效优化参数配置。
1.2 无人机运动模型

1.3 光电载荷探测模型
2 不确定环境下区域搜索方法
2.1 无人机搜索性能指标函数

2.2 基于粒子群算法的滚动搜索方法
3 光电载荷参数影响分析
3.1 单个网格平均探测次数估计

3.2 任务区域平均探测步数估计

3.3 误判概率估计

4 仿真结果分析
4.1 目标搜索性能
4.2 探测概率影响
4.3 虚警概率影响
5 结论
