基于模拟退火算法的Stewart平台的运动学正解分析
2020-08-13邵云龙吴建民孔森
邵云龙 吴建民 孔森

摘 要: 在工业生产之中Stewart平台被广泛应用。由于上平台得位姿不易得到测量,又需要监控机构的运行位置。因此对Stewart平台进行运动学正解分析是十分必要的。本文利用牛顿-泰勒法建立Stewart平台的运动学正解模型,求解出位置逆解、速度逆解。并利用模拟退火算法与初值无关并且具有概率突跳性和Newton-Raphson迭代法精度高的特点,提出了模拟退火算法和Newton-Raphson迭代法相结合的Stewart平台位置正解方法。通过MATLAB编制了运动学正解和运动学反解的程序。利用SolidWorks进行建模,并且在Adams上进行运动仿真验真了算法的准确性, 为下一步的研究提供理论依据。
关键词: Stewart平台;模拟退火算法;Newton-Raphson;SolidWorks;Adams
中图分类号: TP273 文献标识码: A DOI:10.3969/j.issn.1003-6970.2020.06.051
本文著录格式:邵云龙,吴建民,孔森,等. 基于模拟退火算法的Stewart平台的运动学正解分析[J]. 软件,2020,41(06):247252+256
【Abstract】: The Stewart platform is widely used in industrial production due to its advantages such as high rigidity, stable structure, and other advantages. However, since the posture of the upper platform is difficult to measure during the operation, it is necessary to monitor the operating position of the mechanism to ensure the safe operation of the mechanism. Therefore, it is necessary to analyze the forward kinematics of the Stewart platform. In this paper, the Newton-Taylor method is used to establish a positive kinematics solution model of the Stewart platform, and the inverse position and velocity solutions are solved. The simulated annealing algorithm is independent of the initial value and has the characteristics of probability jump and high accuracy of the Newton-Raphson iteration method. A Stewart platform forward solution method combining the simulated annealing algorithm and the Newton-Raphson iteration method is proposed. Programs for positive and negative kinematics were compiled by MATLAB. Modeling with SolidWorks and motion simulation on Adams verified the accuracy of the algorithm, providing a theoretical basis for further research.
【Key words】: Stewart platform; Simulated annealing algorithm; Newton-Raphson; SolidWorks; Adams
0 引言
Stewart平台是自动化领域最具标志性的并联机械装置,在工业上得到了广泛应用,如舰载稳定平台、海浪运动模拟器、人形机器人腰部结构等等。近年来,由于运动学正解问题在研究过程中处于基础性地位,越来越多的国内外学者投身于对其的研究[1]。对于Stewart平台,上平台可以实现6个自由度的运动。为了使上平台可以更加精确的完成预先设定的运动轨迹,其运动学正解研究变得愈发重要起来。Manuel Cardona将牛顿-拉夫森数值迭代算法应用于Stewart平台运动学位置正解的过程中,能够快速得到运动学正解的其中一解[2]。张宗之,秦俊奇,陈海龙,刘平松等人采用BP神经算法,解决了数值解法当中出现的计算速度较慢,迭代初值选取不当将会导致运算结果出现较大偏差的不利情况[3]。杨恒,薛开将变搜索原点的牛顿迭代法应用于Stewart平台运动学位置正解的过程中[4]。李晶針对当前Stewart平台正解法存在的问题,提出了遗传神经网络正解算法[5]。胡启国,骆艳丽,王宇谦等人提出一种应用于Stewart平台运动学位置正解的过程中的基于多目标遗传算法(NSGA-Ⅱ)和最小二乘理论结合的算法[6]。
为了保证平台的安全运行并且实现对Stewart 平台空间机构位置的实时监控。本文重点研究模拟退火算法和Newton-Raphson迭代法相结合的Stewart平台位置正解方法。并依靠MATLAB编制运动学正解和运动学反解的求解程序。通过SolidWorks进行建模,在Adams上进行运动仿真,验真了算法的准确性,为下一步的研究提供理论依据。
1 运动学分析
为了更为清晰地描述上平台的运动姿态。将动坐标系固定在上平台上,并且其原点将与上平台的中心重合。将静坐标系固定在空间之中。当整个平台处于初始状态时,静坐标系将与动坐标系重合。
令Bi和bi分别表示运动平台的下铰点和上铰点。运动平台上、下铰点分别位于半径为Ra、Rb的圆周上。上平台的原点设为O1点,建立坐标系O1-XYZ。下平台的坐标原点记为O,建立坐标系O-XYZ。当动平台处于初始状态时,下平台的坐标系Z轴将穿过O1点。此时,运动平台的初始高度为H,Stewart平台运动学模型如图所示。
1.1 运动学反解
1.1.1 杆长伸缩量分析
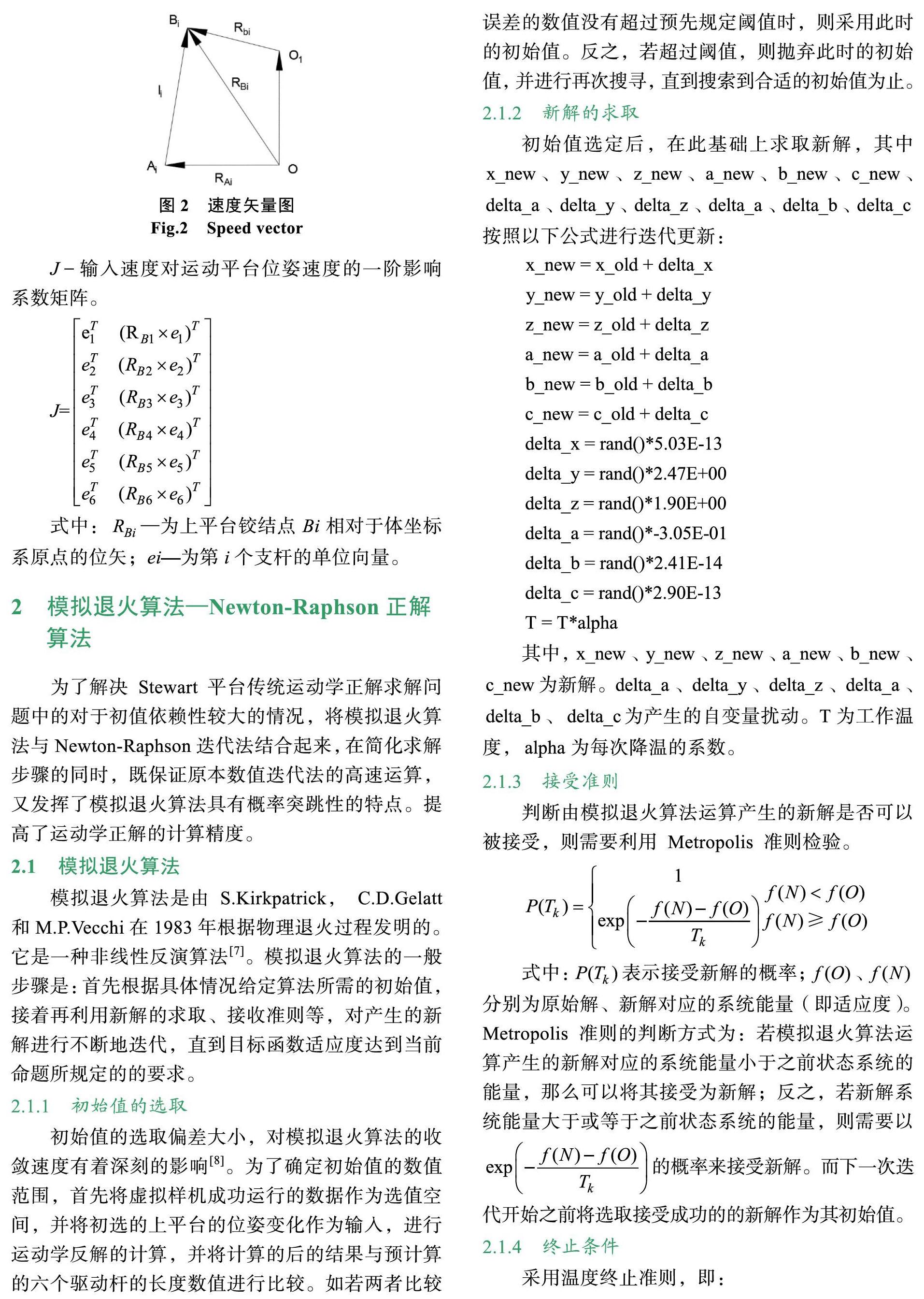
1.1.2 速度变化分析
我们可以用构建速度矢量图的方法来更加直观的研究速度变化分析。如下图所示,li表示驱动杆的长度,RAi可以表示驱动杆上铰结点在体坐标系中矢量。 可以表示为驱动杆下铰结点在静坐标系中的矢量。将动坐标系中的原点矢量用R示。另外,用 来表示驱动杆上铰结点在静坐标系中的矢量。
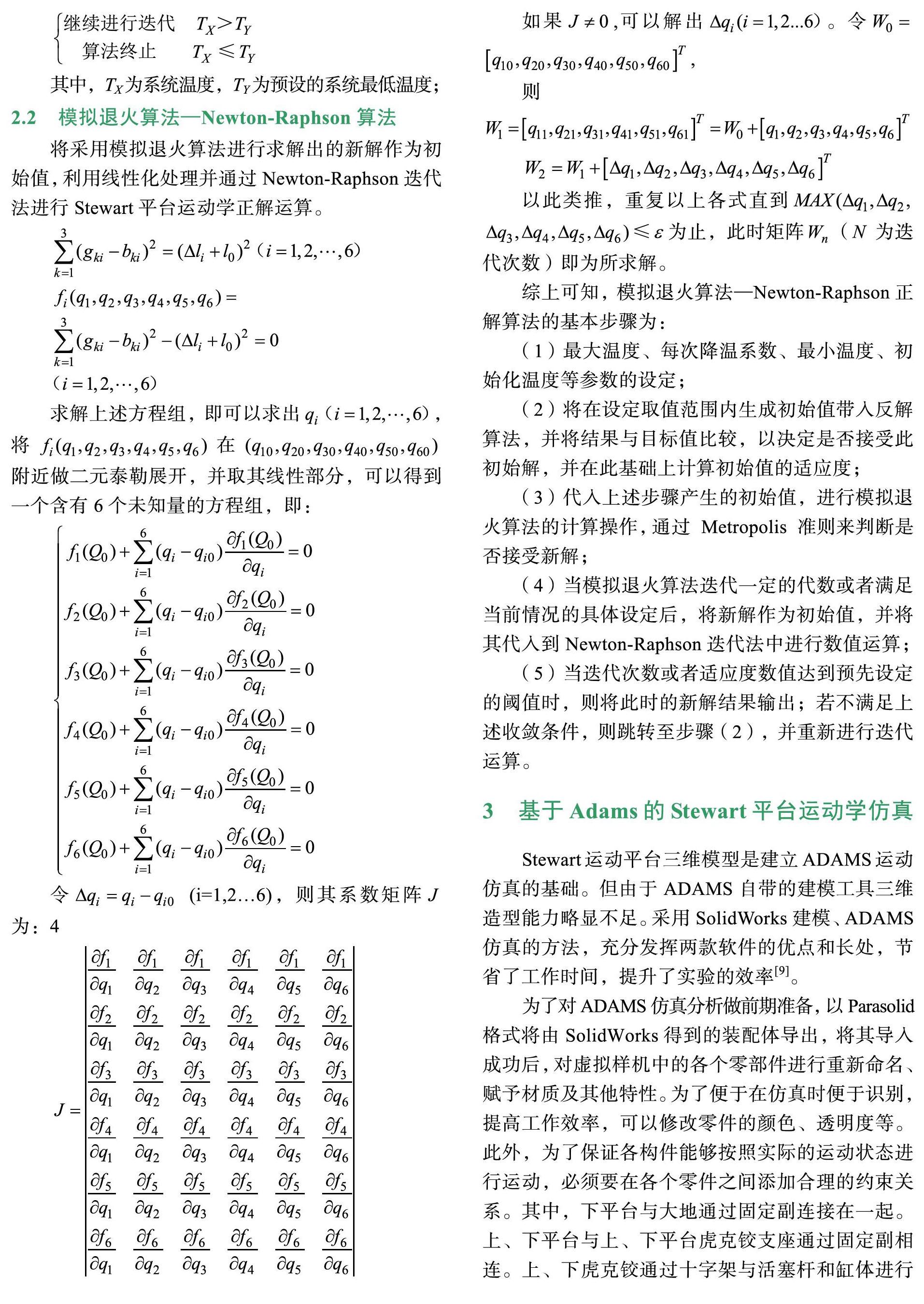
2 模拟退火算法—Newton-Raphson正解算法
为了解决Stewart平臺传统运动学正解求解问题中的对于初值依赖性较大的情况,将模拟退火算法与Newton-Raphson迭代法结合起来,在简化求解步骤的同时,既保证原本数值迭代法的高速运算,又发挥了模拟退火算法具有概率突跳性的特点。提高了运动学正解的计算精度。
2.1 模拟退火算法
模拟退火算法是由S.Kirkpatrick, C.D.Gelatt和M.P.Vecchi在1983年根据物理退火过程发明的。它是一种非线性反演算法[7]。模拟退火算法的一般步骤是:首先根据具体情况给定算法所需的初始值,接着再利用新解的求取、接收准则等,对产生的新解进行不断地迭代,直到目标函数适应度达到当前命题所规定的的要求。
2.1.1 初始值的选取
初始值的选取偏差大小,对模拟退火算法的收敛速度有着深刻的影响[8]。为了确定初始值的数值范围,首先将虚拟样机成功运行的数据作为选值空间,并将初选的上平台的位姿变化作为输入,进行运动学反解的计算,并将计算的后的结果与预计算的六个驱动杆的长度数值进行比较。如若两者比较误差的数值没有超过预先规定阈值时,则采用此时的初始值。反之,若超过阈值,则抛弃此时的初始值,并进行再次搜寻,直到搜索到合适的初始值为止。
2.1.2 新解的求取
综上可知,模拟退火算法—Newton-Raphson正解算法的基本步骤为:
(1)最大温度、每次降温系数、最小温度、初始化温度等参数的设定;
(2)将在设定取值范围内生成初始值带入反解算法,并将结果与目标值比较,以决定是否接受此初始解,并在此基础上计算初始值的适应度;
(3)代入上述步骤产生的初始值,进行模拟退火算法的计算操作,通过 Metropolis 准则来判断是否接受新解;
(4)当模拟退火算法迭代一定的代数或者满足当前情况的具体设定后,将新解作为初始值,并将其代入到Newton-Raphson迭代法中进行数值运算;
(5)当迭代次数或者适应度数值达到预先设定的阈值时,则将此时的新解结果输出;若不满足上述收敛条件,则跳转至步骤(2),并重新进行迭代运算。
3 基于Adams的Stewart平台运动学仿真
Stewart运动平台三维模型是建立ADAMS运动仿真的基础。但由于ADAMS自带的建模工具三维造型能力略显不足。采用SolidWorks建模、ADAMS仿真的方法,充分发挥两款软件的优点和长处,节省了工作时间,提升了实验的效率[9]。
为了对ADAMS仿真分析做前期准备,以Parasolid格式将由SolidWorks得到的装配体导出,将其导入成功后,对虚拟样机中的各个零部件进行重新命名、赋予材质及其他特性。为了便于在仿真时便于识别,提高工作效率,可以修改零件的颜色、透明度等。此外,为了保证各构件能够按照实际的运动状态进行运动,必须要在各个零件之间添加合理的约束关系。其中,下平台与大地通过固定副连接在一起。上、下平台与上、下平台虎克铰支座通过固定副相连。上、下虎克铰通过十字架与活塞杆和缸体进行万向节副的连接,活塞杆和缸体间可以以圆柱副相连,另外,活塞杆与缸体间需要添加移动副。
Stewart平台的虚拟样机的结构参数为:上平台直径为300 mm,下平台直径为400 mm。当平台处于初始位置时,下平台到上平台的距离h为450 mm,各个杆长li均为470 mm。Stewart平台的虚拟样机如图所示。
上平台相邻较近的两个铰结点之间的距离为77.4 mm,相邻较远的两个铰结点之间的距离为424.26 mm。上平台的各个铰结点之间的位置关系图如图所示。
下平台相邻较近的两个铰结点之间的距离为103.2 mm,相邻较远的两个铰结点之间的距离为565.68 mm。下平台的各个铰结点之间的位置关系图如图所示。
结果可以表明:姿态角度信息求解结果稳定,坐标位置信息有一定的误差,但每次计算结果的误差均稳定在一定范围内并且相差较小。对于平台的运动学正解来说,是可以接受的,说明该方法能够用于平台位姿的运算。
5 结论
仿真结果验证了正解算法的合理性和有效性,对 Stewart 平台的运动学正解分析提供了新的解决思路。对实际工作中的运动平台的控制和监测,具有一定的实际意义。
参考文献
[1] 朱俊豪, 尤晶晶, 叶鹏达. 七支链Stewart并联机构位置正解的半解析算法[J]. 机械设计与制造工程, 2019, 48(07): 30-34.
[2] CARDONA M. A new approach for the forward kinematics of general stewart-gough platform[C]//Central American andPanama Convention. New York: IEEE, 2016: 1-6.
[3] 张宗之, 秦俊奇, 陈海龙, 刘平松. 基于BP神经网络的Stewart平台位姿正解算法研究[J]. 机械传动, 2015, 39(06): 54-57.
[4] 杨恒, 薛开. 六自由度并联机构变搜索原点迭代正解方法[J]. 应用科技, 2016, 43(02): 54-58.
[5] 李晶. 六自由度Stewart平台运动学遗传神经网络正解[J]. 舰船科学技术, 2017, 39(04): 112-114.
[6] 胡启国, 骆艳丽, 王宇谦. 基于多目标遗传算法的Stewart平台运动学正解解算[J]. 机械传动, 2019, 43(03): 48-53.
[7] 邵文超. 基于模拟退火算法的船舶航向PID控制器参数优化研究[J]. 科学技术创新, 2019(22): 19-21.
[8] 冯进, 倪小威, 杨清, 管耀, 刘迪仁. 基于混合模拟退火算法的阵列侧向测井实时反演研究[J]. 石油钻探技术, 2019, 47(05): 121-126.
[9] 林砺宗, 潘大亨, 傅招国, 倪小鹏. 基于ADAMS的六自由度液压动感平台建模及运动学仿真[J]. 机床与液压, 2012, 40(13): 166-169+174.
[10] 林智宏, 曾震宇, 朱钰, 宫瑞. 船舶运动仿真平台的设计[J]. 自动化技术与应用, 2016, 35(12): 104-107.
