基于自适应模糊递归控制的机器手臂位置跟踪研究
2020-08-13贺乃宝赵俊杰
王 刚,贺乃宝,高 倩,赵俊杰
(江苏理工学院,常州 213000)
0 引言
传统的伺服电机被广泛运用于各种控制系统中,但由于我国机器人现阶段状况以及直驱力矩电机表现出的优势,用直驱代替传统的驱动方式被很多人运用,但这种方式对控制算法要求很高。早前有人为了解决机器人运动学方面的问题,运用神经网络来设计控制器[1,2],但其自身存在的缺点通常需要跟其他控制算法相结合。文[3]中是研究将神经网络算法加入机器人控制器的设计中,仿真结果验证了在具体机器人的控制中此方法是可行的。在文[4~8]中分别研究了不同的自适应模糊算法,结果表明对控制对象都有较好的跟踪控制效果。现阶段,模糊控制对于复杂的非线性控制系统还是有很好的控制效果,所以,本文基于自适应模糊递归控制来设计控制器,对直驱电机双关节机械臂的位置进行跟踪控制。
1 系统描述
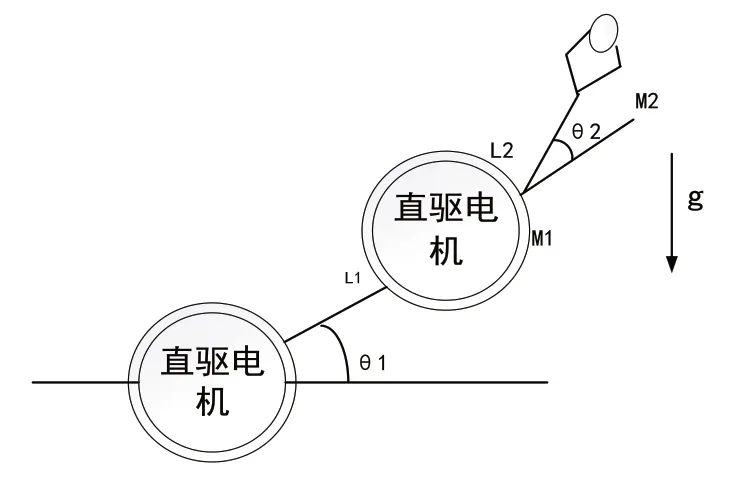
图1 机械臂示意图
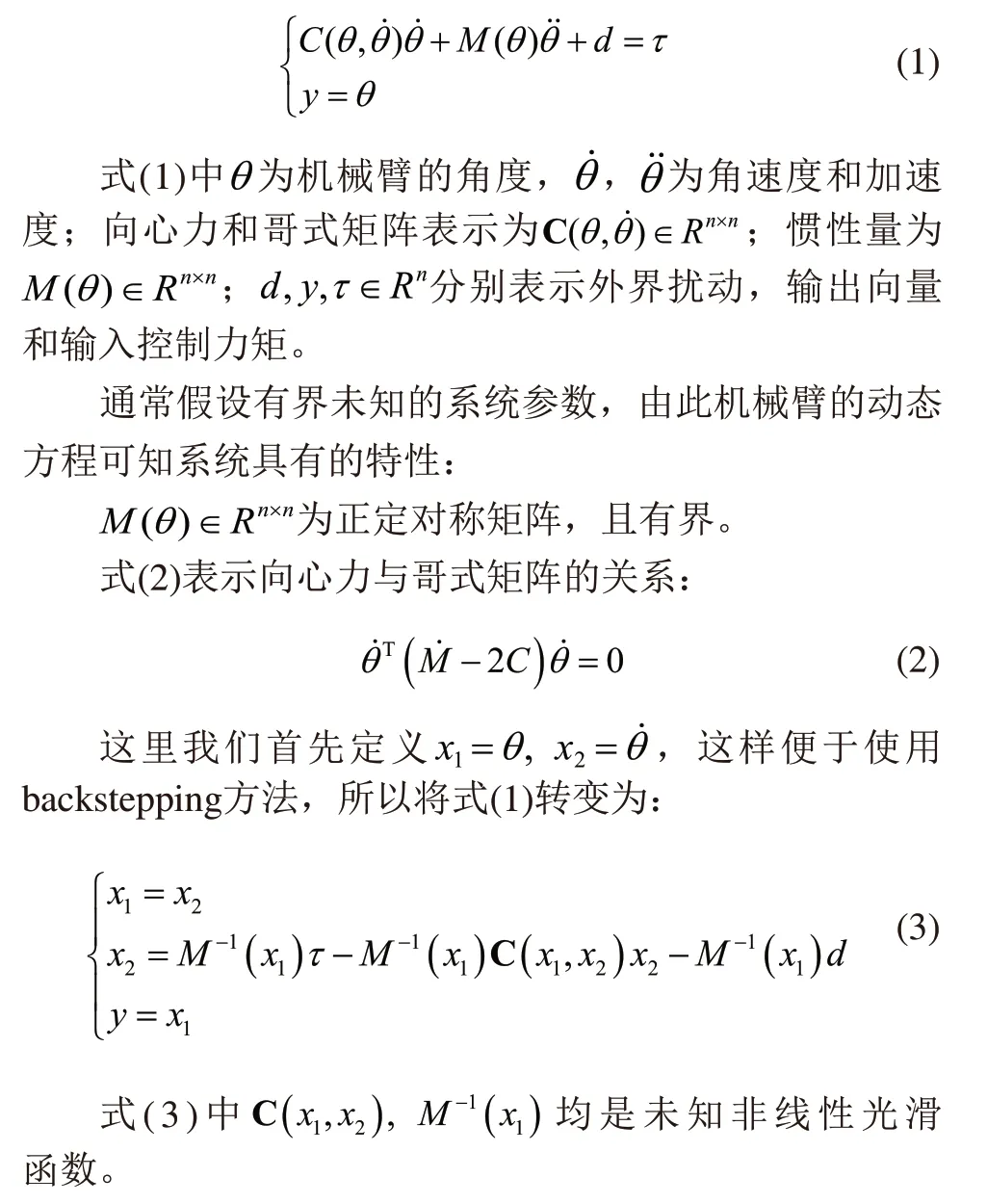
双关节机械手臂结构模型如图1所示,动力学方程:
2 Backstepping控制器设计及稳定性分析
2.1 Backstepping控制器设计
在进行控制器设计之前我们先进行变量公式的定义,假设yd为具有二阶导数的期望角度,y跟踪轨迹yd为控制目标,定义误差表示为:

x2为α1的估计值,其误差定义为:

通过选取α1,使得z2趋近于0.由式(4)和式(5)可以整合得到:
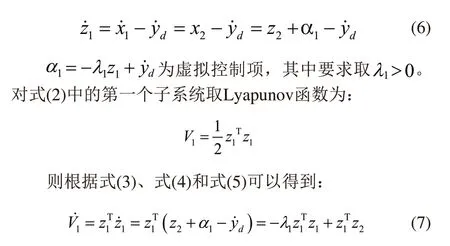
z2=0则可判定该系统第一个子系统稳定。
接下来进行控制率的设计,由式(3)和式(5)可得:
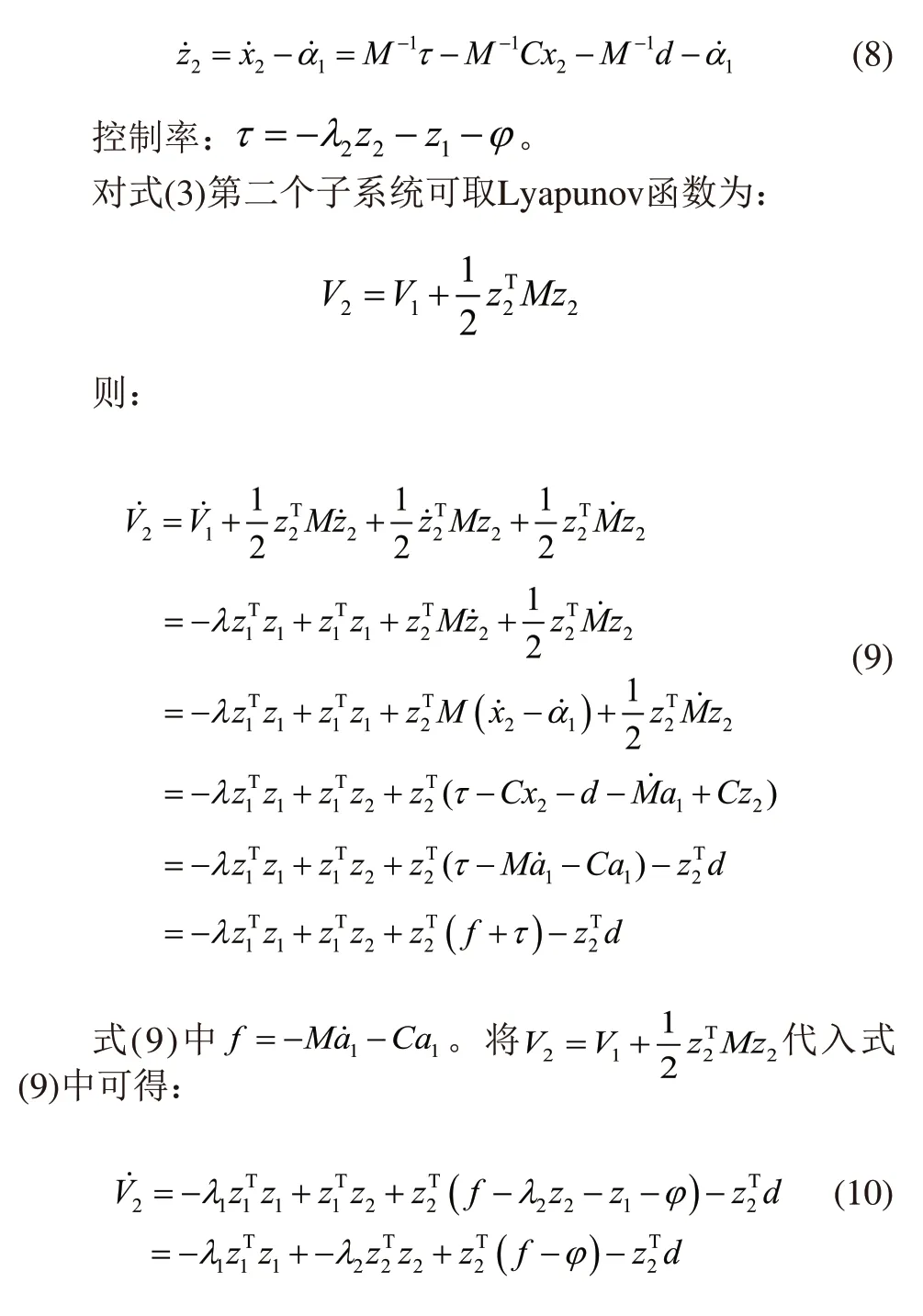
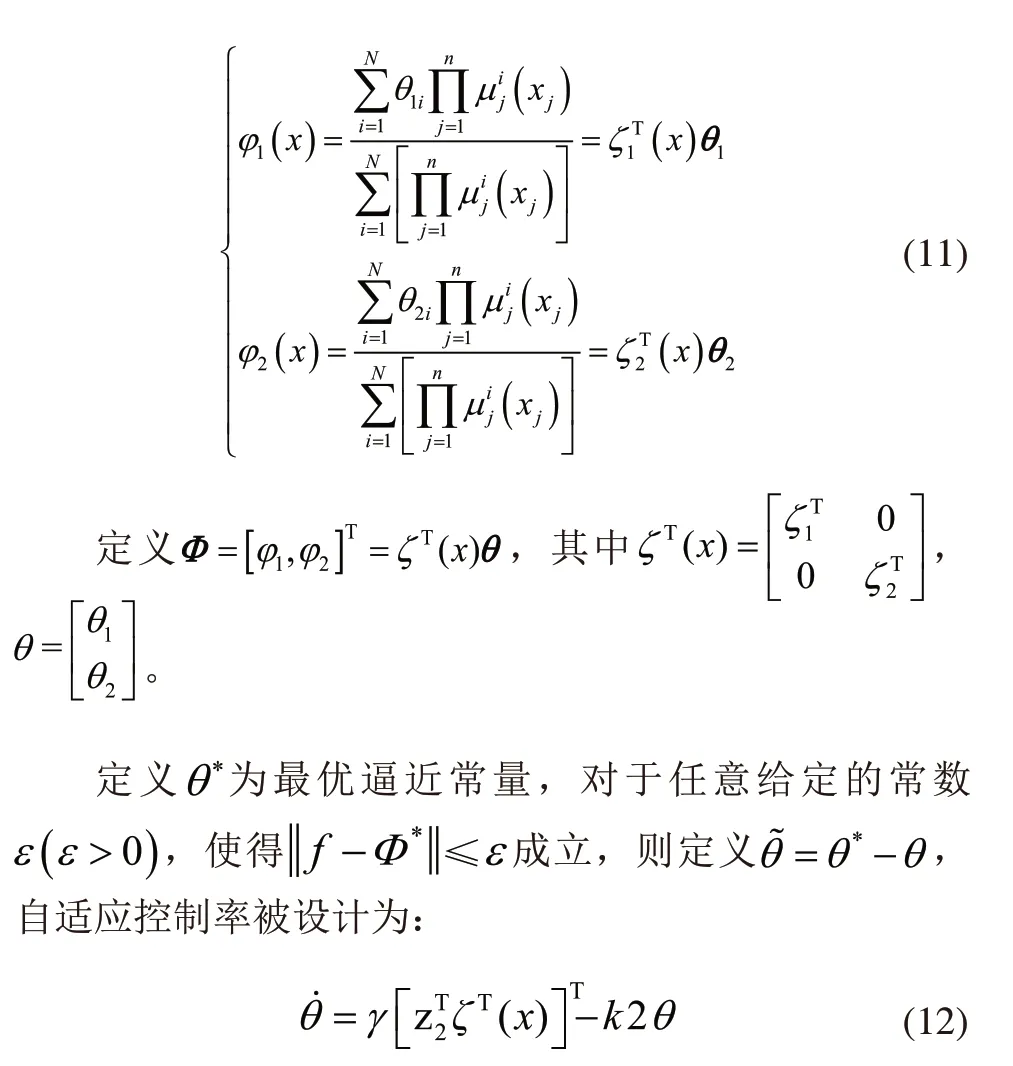
通过对f表达式的分析,可知其中包含了机械臂的相关建模信息,这里采用模糊系统逼近f来实现无需模型信息的控制,在逼近非线性函数f的系统中引入φ。根据IF-THEN控制规则,采用乘积推理机、单值模糊化和重心平均反模糊化的方法来构造模糊系统[9~11]。
对f(1)和f(2)分别采用模糊逼近,设计出该模糊系统如式(11)所示。
2.2 系统稳定性分析
整个系统的Lyapunov函数取为:

将式(12)代入式(15)中:

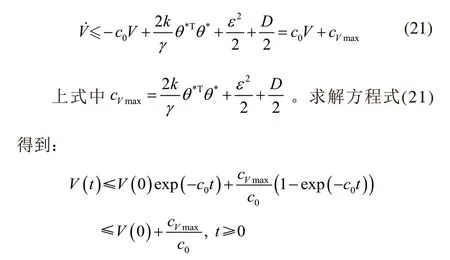
其中V的初始值为V(0)。
3 系统整体仿真试验
本仿真实验以机械臂为被控对象,通过实验验证控制算法的精确性和先进性,由此可知该系统是稳定的,将最终试验结果和直接自适应模糊控制算法进行比较,得出此次设计的算法优越性明显且稳定控制效果明显[12]。
系统的参数取值如下所示:
1)连杆质量m1=0.765,m2=0.765;
2)连杆长度l1=0.25,l2=0.25;
3)关节到连杆重心距离r1=0.15,r2=0.15;
4)系统的初始状态x(0)=[1,1,0,0]T;
取模糊系统的隶属函数为:
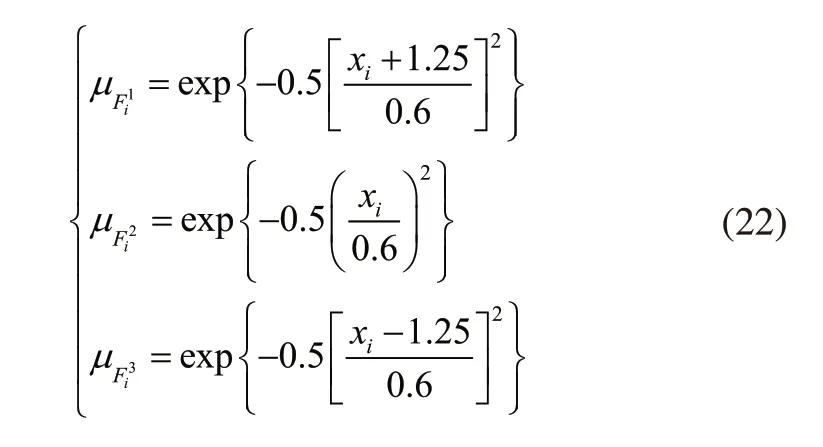
令控制律和自适应律式中λ1=30,λ2=50,k=1.5,γ=2,其仿真程序如图2所示,关节的期望轨迹都是yd=sin(2πt)。位置跟踪仿真结果如图3所示。
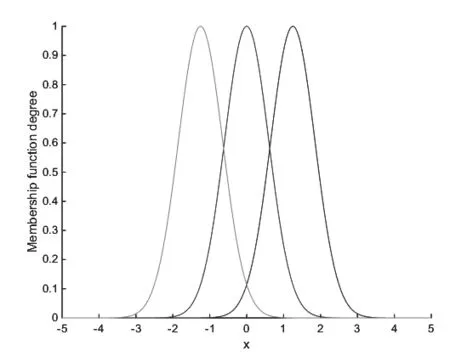
图2 模糊隶属函数的设计
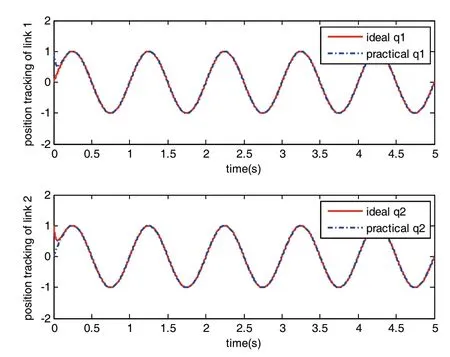
图3 双力臂位置跟踪轨迹
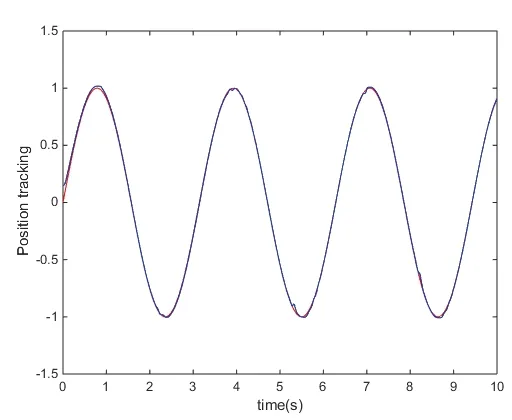
图4 直接自适应模糊控制的位置跟踪轨迹
将本次仿真实验图跟直接自适应模糊控制的位置跟踪轨迹图相比较,如图3和图4所示,可以很明显的看出Backstepping模糊自适应控制实现了对控制对象的更好的稳定跟踪控制,图3中可以看出控制响应非常迅速,在对关节1进行位置跟踪时响应时间大约需要0.11s,关节2仅大约需要0.09秒,而且,轨迹曲线稳定且准确,图4中直接自适应模糊控制下的关节响应时间慢,并且控制效果不是很好,而本次测试响应更加快速,控制效果精度高,实现了预期的效果。
4 结语
本次研究对直驱双关节机械手臂完成了基于自适应模糊递归控制算法的研究设计,并达到预期效果,主要研究结论如下:
1)通过对当前控制电机的研究,了解了直驱力矩电机的机理以及相比于减速器的优势,在今后的机器人控制技术发展方面会有很好的应用研究前景。
2)对Backstepping模糊自适应控制器进行稳定性分析,结果显示本次设计的算法稳定且合理,可以对此类机器人进行位置跟踪控制。
3)将本次仿真得到的实验结果与直接自适应模糊控制进行比较,得出本次实验设计的控制算法拥有更快的响应时间,位置跟踪控制更加稳定精确。
4)虽然本次设计的控制算法具有良好的控制效果,但是还有些问题需要改进的,下一步要做的就是如何优化模糊规则。
