一种柔性恒力变胞机械手设计
2020-08-11吴明
吴明

摘 要:柔性机构在弹性变形的过程中往往伴随着能量的储存与释放,若储存与释放的能量较为接近时即可达到恒力的效果。变胞机构可以在极短的时间内完成部分构件的合并与分离动作,同时改变机构中有效构件数或自由度数量并形成新构型机构。本文在柔性变胞原理的基础上设计了一种恒力机械手,介绍了该机械手的运动分析与结构设计,并实施了恒力运动分析。这种柔性变胞恒力机械手能够实现较好的自适应性,可以用在芯片、玻璃等易碎产品的夹取,具有广阔的市场空间。
关键词:机械手;柔性变胞;恒力;运动分析
科学技术的进步始终是人类社会继续发展的原动力,其中精密工程、机器人产业、生物工程产业以及材料学的发展和应用就离不开柔性机构的支持。目前,已经在柔性机构的研究中取得不错成绩的知名学府包括南洋理工大学、日本大阪大学、马来西亚大学以及首尔大学等,为柔性机构的应用奠定了基础。1998年美国机械工程师协会第一次提出了变胞机构的概念,其中变胞机构能够在瞬间内完成机构自由度的变换并实现奇异变形的特点得到了业界的极大兴趣。在当前的高新科技中,芯片、玻璃以及其他一些易碎物品的夹持始终是一大难题,以往往往是在薄壁易碎类产品的夹持方案中引入力反馈传感器,以达到实时调整夹持力的效果。通过柔性变胞机构的合理运用以及其与机械手的设计相结合,能够摆脱力反馈传感器的限制,在实现恒力柔性夹持的前提下实现较高的可靠性,并有效降低成本。
由于柔性恒力机构能够保证在工作过程中消除输入力大小波动的影响,保持机械手输出力始终保持稳定,因而可以保证在夹持薄壁、易碎类产品的时候不会造成产品的损坏。例如,使用柔性恒力变胞机械手用于生物工程领域研究中的细胞、植物纤维以及动物卵等薄壁物的夹取,可以实现较高的夹取可靠性;在精密工程领域中可以使用柔性恒力变胞机械手夹持芯片等精密元器件进行过程中转与终端装配。
1 柔性恒力变胞机械手设计概述
1.1 柔性恒力变胞机械手运动分析
灯泡是一种典型且常见的薄壁易碎类物品,如下图1所示为柔性恒力变胞机械手夹持灯泡的三个过程,其中A、B、C、D皆为转动副,杆件1和2连接处设置了扭簧。
如上图1(a)所示,滑块4向上移动时杆件1和2之间的转动分离力矩小于杆件1与杆件2连接处的扭簧力或者等于0。将杆件1与杆件2看成是一个整体,其中活动构件数n=3,低副数 Pl=4,高副数ph=0,可求得机构自由度F:
图1所示的结构中只有1个原动件,自由度F也等于1,机构运动方向向上。当构件1接触需要夹取的产品时,构件1與构件2之间的转动分离力矩会超过扭簧的闭合力,该机构会出现变胞运动。由杆件1与杆件2都从1个构件变成2个构件,整体构件的数量就从3个变成4个,如上图1(b)所示。由于杆件1接触灯泡时不会出现相对运动,因而可以作为固定端,随着滑块4的向上移动,杆件2会围绕转动副B为中心开始旋转,如上图1(c)所示。最终,该柔性变胞机构的活动构件数、低副数以及高副数与自由度均未发生改变,即n=3,低副数pl=4,高副数ph=0,机构自由度,
该机构中仍只有一个原动件,原动件数与机构自由度数相等,机构运动方向为向上。
1.2 柔性变胞恒力机械手结构分析
柔性变胞恒力机械手结构示意图如下图2(a)所示,其中杆件4、5、6皆为连架杆,分别当成1个构件来处理,此三个构件相互成120°夹角,通过转动副实现连接。为了适应多种规格大小的灯泡,设计了螺纹杆结构来调节机械手的开口大小。使用该柔性变胞恒力机械手拆卸灯泡时,操作人员手持机构的手柄,当机械手与灯泡之间的距离较近时,开始向右旋转螺母,图2(a)中构件6与灯泡的玻璃罩接触,继续旋转螺母时会导致扭簧闭合力小于构件转动分离力矩,机构随即开始变胞,图中构件5驱动机械手加紧灯泡玻璃罩。由于在一定的条件下可以认为柔性机构在变形过程中储存和释放的能量近似相等,可以认为该机械手装置夹紧灯泡过程中保持恒力。
2 柔性变胞恒力机械手恒力运动分析
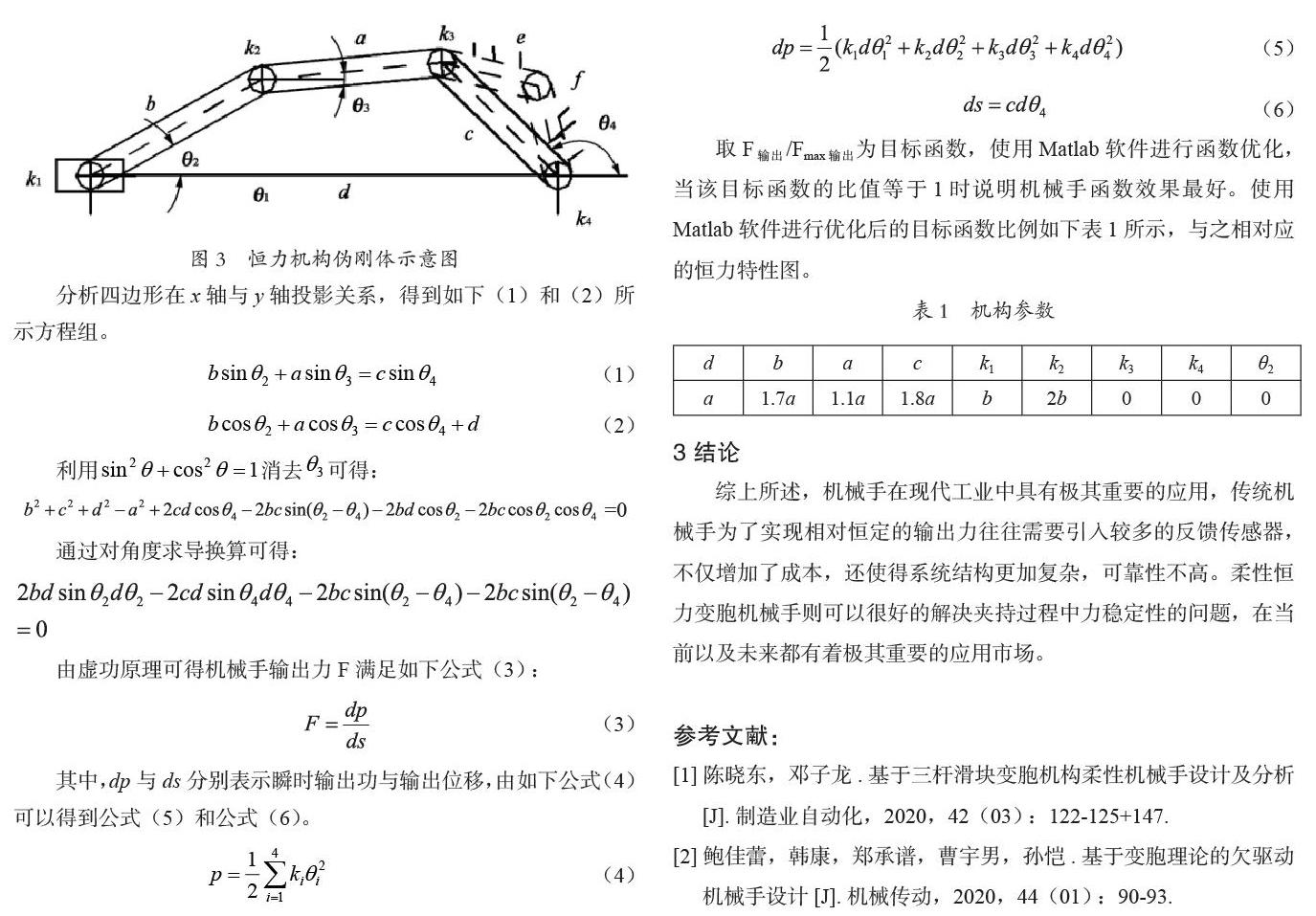
如下图3所示,仍以夹持灯泡玻璃罩为例,将短臂柔性铰链视为转动副,则自由度F
图3所示机构自由度数为1,运动方向确定,k1、k2、k3、k4都表示铰链刚度,a、b、 c、d分别表示四个杆件的长度。夹持过程中e,f与灯泡玻璃罩不发生相对转动,将二者作为整体杆件c处理。
取F输出/Fmax输出为目标函数,使用Matlab软件进行函数优化,当该目标函数的比值等于1时说明机械手函数效果最好。使用Matlab软件进行优化后的目标函数比例如下表1所示,与之相对应的恒力特性图。
3 结论
综上所述,机械手在现代工业中具有极其重要的应用,传统机械手为了实现相对恒定的输出力往往需要引入较多的反馈传感器,不仅增加了成本,还使得系统结构更加复杂,可靠性不高。柔性恒力变胞机械手则可以很好的解决夹持过程中力稳定性的问题,在当前以及未来都有着极其重要的应用市场。
参考文献:
[1]陈晓东,邓子龙.基于三杆滑块变胞机构柔性机械手设计及分析[J].制造业自动化,2020,42(03):122-125+147.
[2]鲍佳蕾,韩康,郑承谱,曹宇男,孙恺.基于变胞理论的欠驱动机械手设计[J].机械传动,2020,44(01):90-93.
