吸盘机械手的仿生控制
2022-06-25刘严
[ 作者简介 ]
刘严,男,江苏南通人,江苏大学机械学院,本科在读,研究方向:仿生机械。
[ 项目名称 ]
江苏大学科研立项。课题:吸盘机械手的仿生控制。项目编号(20AA0064)。
[ 摘要 ]
吸盘机械手是利用大气压力将柔性材料制造的吸盘紧贴在工件上,达到搬运工件的目的。本文主要从吸盘机械手的仿生控制现状、设计思路以及应用前景几方面分析,希望为我国吸盘机械手的仿生控制提供理论依据。
[ 关键词 ]
吸盘机械手;仿生控制;应用前景
吸盘机械手的仿生控制可以运用到多个领域。我们通过仿生鹰在捕获猎物时鹰爪的动作,让吸盘机械手可以做出抓取的动作,可以轻松抓取中小型物体。另外,因为真空吸盘的作用,吸盘机械手可以牢牢地抓住许多光滑的东西,例如玻璃、陶瓷、包装贴纸、文件等等,且由于吸力的作用,吸盘机械手会比其他机械手抓得更加牢固稳定。
1 吸盘机械手的仿生控制现状
目前,国际上的工业机器人公司主要分为:日系、欧系。以一些欧洲国家和日本为代表的工业强国,其国内工业界将技术水平已经十分成熟的机器人产品作为一种标准的工业设备在工厂中广泛应用,依靠强大的科技实力,使国内装备制造业的自动化水平有了极大的提高。同时,在这些国家和地区中,涉及机器人研究、生产的企业已经成为所在地的主要支柱产业。这些老牌的工业强国在工业机器人方面都具有很强的技术实力,产品均带有自己的特点,在世界机器人领域都占有一席之地。总体来看,我国工业机器人技术起步较晚,加之过去国情所限,我国工业机器人发展缓慢,研究及应用水平比较低。随着20世纪80年代的国家“七五”科技攻关计划和20世纪90年代实施的863计划,将工业机器人列入发展计划,并逐步形成了如中国科学院沈阳自动化研究所、哈尔滨工业大学、上海交通大学、北京机械自动化研究所等一批专业机构,展开了机器人基础理论与基础元器件研究,现已开发了7种工业机器人系列产品,102种特种机器人,实施了100余项机器人应用工程。宝鸡新科机械制造有限公司于2008年研制出RMD70型码垛机器人,是专门用于包装行业自主设计的产品。该机器人具有很大的负载能力,可达450 kg,工作效率可达每小时700次。与之前的产品相比,其主要的设计特点是其在机械结构设计上采用了适用于承受重载的行星减速器,在控制系统方面配套了德国先进的控制元器件。如今机器人吸盘夹具构造简易,零配件普及化,检修与生产制造极其便捷。可是因为产生器是由空氣压缩的正压力变换为负压力,转化率低,耗能是全部真空泵源中比较大的一种,产生器受构造危害,在应用中因为密封胶条缘故吸进切削油造成负压力左右起伏大,在重切生产加工时非常容易导致零件撸管状况。在目前机器人吸盘夹具中的仿生技术真空吸盘刚开始普及与受到高度重视,根据模拟动物真空吸盘的姿势基本原理生产制造,拥有颠覆性创新的改进,从吸附零件和释放出来零件时各应用一次气动阀门,生产过程中不用气动阀门的适用,保证真空泵0损害率,自动检索零件不用密封胶条密封,水冲生产加工时不容易对盘造成危害。这针对生产加工的便捷性显而易见,不用围密封胶条,不用气动阀门适用,随时都可以应用。在当今生产生活水平不断发展、自动化技术不断普及、科技不断创新的环境下,机械手的应用必将进一步得到拓宽。随着应该范围的不断拓宽,其技术、结构等方面也将更加优化。可以预测,未来机械手将有着以下几方面的发展与改进:机械手外形结构与人手更加相似,手指的运动更加灵活;机械手的控制系统在未来将会集成化,甚至会直接安装在手掌内;手掌会设计得更加灵活;控制系统将会更加智能;机械手能完成的动作将会越来越丰富,直到达到与人手几乎相同的程度。
2 吸盘机械手的设计思路
吸盘机械手受到了鹰在捕获猎物时鹰爪的动作以及章鱼腕足的启发,所以我们决定对机械手展开研究。受到了仿生学的启发,我们决定通过仿生鹰爪和章鱼腕足设计一个机械手,并且在机械手的指尖部位安装上吸盘。通过仿生鹰爪,我们决定设计均匀分布的四爪机械手。四爪机械手相较于其他机械手而言,结构简单且拥有不俗的抓握能力,适合抓握各种物体。同时考虑到机械手所抓取的物体并不是微小物体,所以机械手在精度的要求上并不是那么高,这样我们决定设计较为简易的机械手。受到章鱼腕足的启发,在设计机械手的同时,我们决定在机械手的指尖位置安装吸盘,以此来弥补四爪机械手不能抓握光滑物体的缺陷。在设计吸盘时,采取对照比较法,比较不同吸盘的材质和吸力大小,以及与机械手连接处的牢固程度,逐步考虑完成后,最终决定吸盘的材质。决定吸盘的材质后,根据实际所需要抓取的物体大小、所需要的吸力大小以及机械手的设计情况来设计吸盘的大小。最后,考虑到实际吸盘与机械手的连接,选择较为合适的材质以及连接方式。
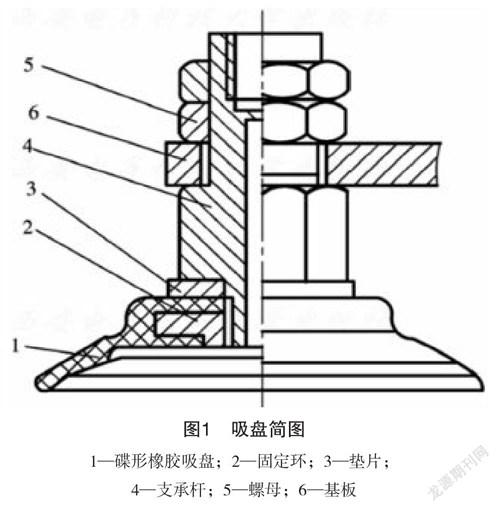
2.1 吸盘简图
如图1所示,用螺栓和螺母将吸盘与机械手进行连接,工作时利用大气压力将物体吸附起来。在需要更换时,螺栓和螺母的组合让吸盘易于更换。
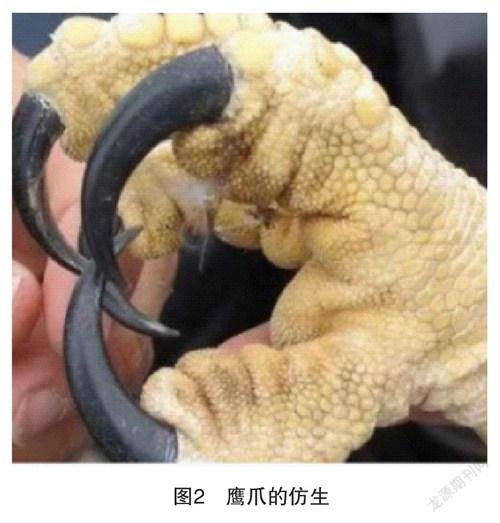
2.2 鹰爪的仿生
如图2所示,在设计机械手时,我们受到了鹰在捕捉猎物时鹰爪动作的启发,决定设计四爪机械手,四爪机械手相比较于其他机械手而言,结构简单且拥有不俗的抓握能力。
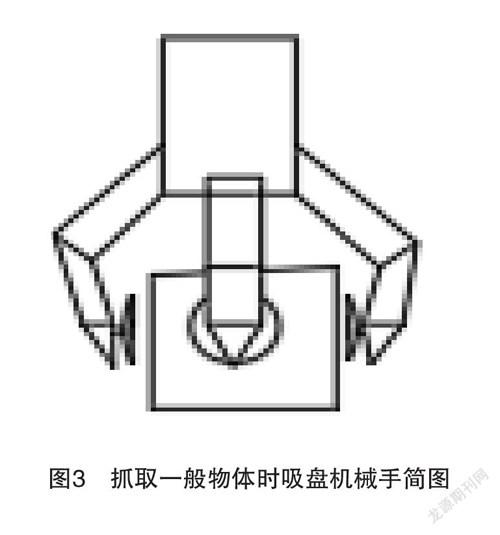
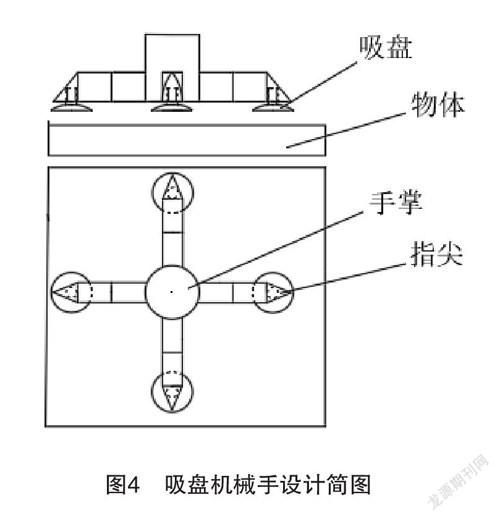
2.3 机械手简图
图3所示为抓取一般物体时吸盘机械手简图,图4所示为吸盘机械手设计简图。当机械手需要抓取吸附光滑物体时,机械手会平铺开,匀速下降,在接触物体表面时,机械手的吸盘发挥作用,将物体吸附起来,从而达到抓取物体的目的。在需要放下物体时,确定平稳后,机械手将指尖弯曲一定程度,缓慢脱离物体。随后返回原位置。在抓取一般物体时,例如快递包裹等,我们可以让机械手的手掌靠近物体,随后,让机械手的手指像鹰爪一样抓紧物体,随后抬起机械手,达到搬运抓取物体的目的。
2.4 PLC控制
在运输物体时,需要用到PLC控制系统,让机械手在水平面内移动,在到达指定位置时,机械手匀速下降,让物体可以平稳地落在指定位置,从而达到运输物体的作用。
3 吸盘机械手的仿生控制应用前景
3.1 缓解物流运输压力
当前的物流运输依然以人工运输为主,并且为了使经济效益最大化提高了工作效率,快递员的分拣运输较为暴力,因此会出现许多快递被损坏的情况,使商家和顾客的利益受到损失。而这一款机械手的研发恰恰可以缓解这一部分情况,在一定程度上可以安全稳定地转运快递,并且可以节省人力物力财力。另外这一机械手可以用于材料、物品的运输。在工作时,吸盘机械手不仅可以抓取不规则物体,还可以抓取表面光滑的物体。凭借其指尖的吸盘,机械手可以轻松地吸附起光滑的物品,而这一类物品一般都有易碎这一特点,但机械手凭借其稳定牢固的吸附性能,可以稳定地将物品放置在指定位置,从而大大减少人力、物力、财力的损失。同样的,在抓取一般物体时,机械手的吸盘增大了接触面积,会使抓取更加牢固、紧密。
3.2 提升位置定位精度
有些领域需要机械手实现物品的精准抓取,定点精准码放,如食品、医疗、电子行业。这些行业对清洁度要求较高,吸盘式机械手被广泛应用。为实现精准定位,多采用多自由度机械臂。机械臂的自由度、结构也多种多样。如食品行业分拣,或者Festo的并联机器人,这类机器人机械臂较为复杂,可实现多自由运动,控制精准,定位准确,技术含量较高,利润也相对可观。
3.3 提取物品范围广泛
吸盘式机械手其执行机构为真空吸盘,可抓取物品范围广泛。真空吸盘吸力大,干净卫生,受到一些对清洁度有要求的行业的青睐。机械臂可佩戴多种形式和结构。可以是无控制的人驱柔性臂,也可以是低自由度的串联机械手,也可以是高自由度的并联机械手,匹配比较灵活。该类机械手在机械手市场中占比非常大,多用于取放件操作比较多、人不好操作或者条件不允许的情况下用机械手臂代替人。
4 结论
不管是现在还是未来,机械手的应用都可以大幅度减少人力、物力、财力,从而提高经济效益,减轻工作负担,让客户和商家都更加省心。并且吸盘的易于更换,可以让机械手适用于不同的工作情况。四爪机械手的结构简单,成本低,沿圆周对称分布,可以吸附,可以环握,可以对握的同时用指尖吸盘,不仅弥补了四爪机械手难以抓握光滑物体的缺陷,还加强了机械手本身抓握一般物体的能力,拥有良好的市场前景和使用价值。
参考文献
[1]杨清. 转运机械手设计与精度稳定性研究[D]. 重庆:重庆交通大学,2020.
[2]徐佳伟,王收军,葛为民,等. 吸盘机械手机构设计与运动学分析[J]. 制造业自动化,2017,39(11):145-149.
[3]夏梦,杨玉萍,季彬彬,等. 吸盘机械手运动参数设计和优化[J]. 机械设计与制造,2020(12):180-183.
[4]张静,薛伟,梁允魁,等. 真空吸附技术及其在工程機械装配中的应用[J]. 工程机械与维修,2015(S1):302-305.
[5]王勇,陈客舟,刘利,等. 基于PLC的物料分拣机械手控制系统设计[J]. 青岛理工大学学报,2019,40(1):108-112.
[6]罗霄,罗庆生. 仿生机械概论[M]. 北京:北京理工大学出版社,2019.
