基于无人机倾斜摄影测量的山丘区表面高程数据评价
2020-08-11刘杨洋吴鹏飞刘金涛韩小乐杨亚钤
刘杨洋,吴鹏飞,刘金涛,2,韩小乐,杨亚钤
(1.河海大学水文水资源学院,江苏 南京 210098;2.河海大学水利学科专业实验教学中心,江苏 南京 210098;3.河海大学地球科学与工程学院,江苏 南京 210098)
0 引 言
地球关键带是一个综合研究近地表陆地环境中水、土壤、岩石、空气和生物资源的整体理论框架[1],其范围从植被冠层一直下延至含水层底部,是跨学科研究的沃土。不同领域的研究者对关键带开展了植被、土壤、水文气象等各个方面观测和研究,这些数据是认识水文过程和流域结构的重要依据[2]。高精度的地形结构信息是研究地貌演化、水流路径等的基础数据[3],也有助于深入刻画流域水文特征。因此,关键带水文学研究迫切要求引入能够反映流域地貌结构及其变化的信息获取技术[4]。
大范围的卫星遥感地形数据虽然覆盖范围较广,但精度较差且无法突破固有的时空限制,数据更新周期通常为几年甚至十几年,并且部分地区存在测量盲区[5],无法满足关键带观测对精度和时效性的需求。无人机(Unmanned Aerial Vehicle)是一种新型遥控低空飞行装置,近年来技术趋于成熟,可根据观测需求为无人机配备不同用途和性能的传感器[6]。借助无人机能高效经济地实现关键带地表信息细节化呈现,在较短时间周期内获取高精度植被和地形信息[7],对研究山坡表层结构、水文连通性等具有重要参考价值[8-9]。
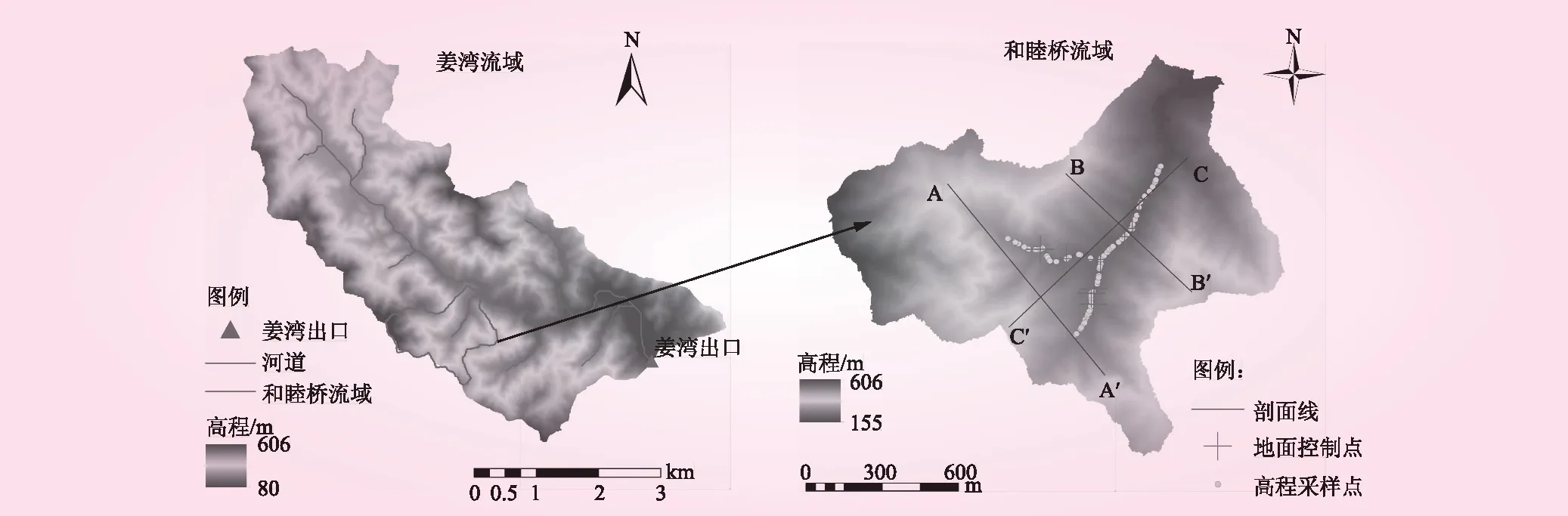
图1 研究区及高程采样点
本文选取太湖源头区和睦桥小流域作为研究对象,通过无人机倾斜摄影技术得到DEM等流域地面信息,将其与实测高程点进行对比评价其精度,并利用SRTM和ASTER GDEM数据对其进行综合评价,比较研究各数据在流域不同位置、地貌条件下的精度和代表性。
1 研究区及方法
1.1 研究区概况
和睦桥流域面积1.35 km2,位于浙江德清县莫干山麓西南,是姜湾流域的子流域,处于太湖流域上游(119°48′E,30°35′N)。和睦桥流域植被原属落叶阔叶混交林,后人工种植竹林,竹林约占整个地区的95%,剩余极小部分为村镇和农田。该流域多为25°~45°的陡峭森林山坡,西南地区的地表高程达到500~606 m。
本研究需实测部分高程点,作为生成无人机地形的地面控制点,并用于评价无人机测量地形。由于流域内部的道路上方无遮挡且易于定位,故沿道路布设85个实测高程点,使用实时动态载波相位差分定位技术(RTK)测量其空间坐标,并将其中10个点选为无人机地形处理的地面控制点。为了评价不同DEM数据在小流域不同地貌条件(山坡、山脊及河谷)的精度,还选取了横跨小流域内部脊线、山坡和主河道的AA′、BB′和CC′作为控制剖面线。研究区及高程采样点见图1。
1.2 表面高程提取方法
采用搭载了全画幅3 600万像素索尼A7R相机的固定翼无人机,对整个和睦桥小流域进行拍摄。拍摄完成后,对无人机影像进行预处理,剔除不合格影像。随后,选取若干具有明显影像特征的地面点作为地面控制点,在预处理后的图像中标注其坐标,作为Pix4Dmapper软件地形分析的参照[10],Pix4Dmapper软件处理流程见图2。

图2 Pix4Dmapper软件处理流程
该技术通过空中三角测量确定表面点三维坐标,即利用2个摄影点和待测点形成的空间三角形计算点坐标。镜头的拍摄位置在规划飞行线路时预设,并参照地面控制点和内置空间位置测量系统进行校正。待测点与镜头的距离由地面控制点位置和镜头参数(焦距、倾角等)计算得到。根据这些数据,多幅图像两两组合可以多次计算同一点的位置信息。将计算结果按照最小二乘法原则进行平差,最终得到待定点的三维坐标。经过空中三角测量,得到包含大量地面点三维坐标和颜色信息的点云文件。为了全面描述流域地形特征,将点云数据进一步加密,并使用点云过滤器对其进行平滑处理[11]。再将加密后的点云数据进行合成,得到所需地形数据。
1.3参与评价的数据及方法
将无人机获取的表面高程数据分别和实测高程点及2种开源数据进行对比,以评价其获取高程数据的精度。SRTM数据由搭载干涉雷达的航天飞机测绘得到,其1″和3″分辨率数据分别下载自美国地质调查局网站(http:∥earthexplorer.usgs.gov/)和地理数据空间云(http:∥www.gscloud.cn/)。ASTER GDEM数据是由高分辨率卫星成像设备获取的,其1″版本的DEM数据下载自地理空间数据云。随后,使用ArcGIS通过双线性插值将这2种数据插值成30 m和90 m分辨率的DEM数据。依据所选取的典型剖面,将其与无人机表面高程数据进行对比,分析不同数据对实际地形的反映情况。

图3 无人机摄影测量处理
2 成果精度评价
2.1 表面高程处理结果
为覆盖整个流域,本次飞行设定的目标区域面积约6.25 km2。该区地形起伏较大,故分2次飞行,飞行的高程分别为854 m和1 015 m,轨迹点不完全重合,以多方位拍摄目标区域内地物。对所有的图像进行预处理,获得有效照片934张。选取10个实测高程点作为地面控制点,将其空间坐标连同所有的图像导入软件进行处理,得到分辨率为8 cm的DEM和正射影像。无人机摄影测量处理结果见图3。
2.2 实测点对比分析
根据无人机图像可直接处理得到8 cm分辨率的高程数据,通过双线性插值得到1、5、10 m分辨率高程数据。在这些分辨率下,85个实测高程点与相应栅格高程的误差分布见图4。从图4可知,8 cm与1 m分辨率DEM的误差集中在±0.30 m,两者误差相近,且呈正态分布(中值约为0)。因此,1 m分辨率的DEM足以反映真实地形。随着栅格尺寸的增大,网格高程值与测点高程差距逐渐增大,且中值不断增大。栅格高程反映的是局部高程的均值,实测高程点位于地势较低的河道附近,两侧多陡峭的山坡,当网格变大时,谷底网格的平均高程值会逐步增大,与测点的差值增大。

图4 不同分辨率数据误差
2.3 不同来源DEM对比分析
图5为每个剖面的开源高程数据与无人机相应分辨率数据的剖面对比。从图5可知,无人机和ASTER GDEM、SRTM地形剖面存在一定的差异,且无人机地形给出的剖面地形起伏更大,后两者则对局部地形有坦化作用,这在地势较低段表现更为明显。如无人机地形和ASTER GDEM、SRTM地形差异明显,前者测得的地形起伏较大,曲线变化剧烈。造成这种现象的原因主要在于,小流域较窄的河道谷地与陡峭的山坡相邻,受分辨率限制,开源卫星DEM在这类谷地存在信息漏失现象,测出的地形相对平坦[5]。这种现象在更为粗糙的数据(如90 m)中表现更为显著。在剖面AA′的中高段(见图5a),ASTER GDEM地形(30 m)明显高于无人机的对应高程,存在一个异常隆起区。在相同地形区段(见图5b),90 m分辨率的SRTM地形比无人机地形高出近10~70 m,低段则有非常大的起伏,拟合度不佳。

图5 不同数据源地形剖面对比
图6为小流域3个剖面正射影像与1 m分辨率无人机剖面曲线叠加效果。从图6可知:
(1)AA′剖面的600~800 m处为连续地形起伏,说明无人机数据能真实反映局部因山峰、山谷和植被的差异造成的地形起伏变化。在相同位置,受分辨率限制,SRTM数据(30 m)存在地形被坦化或数据缺失的现象[12],其剖面高程曲线在该区间上只描绘出1个山脊,其90 m数据代表性则更差。
(2)剖面BB′横跨流域下游河谷,在“V”形河谷线上,无人机高程最低点较ASTER GDEM、SRTM更低,SRTM地形曲线底部则过于平缓,且未能表现出地势较低的山脊。一方面,开源数据受限于自身的分辨率;另一方面,卫星雷达放射角度、植被遮盖等问题也会带来测绘的误差[13-14]。值得注意的是,在剖面BB′中,ASTER GDEM地形相较于SRTM地形和无人机地形有一个横向(沿剖面线)方向的偏移,约左偏了15 m,局部拍摄角度的误差或数据缺失可能会造成这种偏差[13,15]。在90 m分辨率下,ASTER GDEM数据的这种偏移同样存在,而且偏移幅度达到了50 m。这说明,在中低高程区段,ASTER GDEM数据不如另外2种数据精确。
(3)与其他2个剖面类似,剖面CC′亦横跨道路、山脊,无人机1 m和30 m数据也精确地反映了道路、山谷等局部真实地形。

图6 正射影像中的3个剖面
3 结 语
本文对采用无人机技术获取的山丘区小流域表面高程数据进行了综合评价。通过与实际地面控制点和不同开源DEM数据对比发现,无人机数据精度较高,其1 m分辨率DEM能反映真实地形。与无人机数据相比,SRTM、ASTER GDEM数据(30 m和90 m)对局部地形的描绘较差,忽略部分地势相对较平的山坡、山谷,对地形有坦化效应,且数据存在缺失或异常现象,ASTER GDEM数据不能很好的识别较窄的河谷地形起伏。
无人机高分辨率地形数据(1 m分辨率)能够很好地反映局部细微地形,其插值得到的30 m数据亦能保持一定的精度。此外,通过无人机摄影测量技术,地形数据的获取拥有其他数据无法比拟的时效性,能反映较短时间周期内地形的变化。因此,这项技术能为小流域地球关键带结构的监测提供高精度的地形数据。