四轮独立驱动FSEC赛车电子差速控制
2020-08-10宋成镖李刚
宋成镖 李刚
摘 要:本文以四轮驱动FSEC方程式赛车为研究对象,根据其驱动力矩独立可控特点提出一种电子差速控制策略。该策略针对赛车差速控制在比赛中对实时性的需求,设计了以加速度为输入的直接控制算法,该策略简单可靠。并运用车辆动力学仿真软件进行仿真验证,仿真结果表明,上述控制策略能有效提升赛车动态表现。
关键词:四轮独立驱动;电子差速控制;电动方程式赛车;转矩分配
随着电动方程式赛车技术的发展,电子差速控制策略迅速成为赛车控制策略的重点[1]。目前,电子差速控制相关研究十分丰富[2],主要分为基于阿克曼梯形的电子差速方案与基于车辆稳定性的电子差速方案。
第一种差速方案通过方向盘转角预估车辆的行驶路线[3-5],计算各车轮的参考转速,根据轮速传感器返回的实际轮速进行差速控制,该方法控制参数容易获取,但是赛车轮胎工作在非线性范围,并不适用于该方案。第二种电子差速策略以车辆稳定性为控制目标[6-7],基于二自由度车辆模型计算参考横摆角速度或质心侧偏角,结合实际传感器返回值计算所需横摆力矩,以此为基础对驱动力矩进行重新分配,实现电子差速。这种控制方式偏于理论、传感器数据难以获取,较难实现良好控制效果。
本文分析赛车控制需求,设计了一种以纵向加速度与侧向加速度为控制输入的電子差速策略,结合车辆载荷转移模型,提出一种基于车轮载荷比的驱动力分配方案。该控制算法输入参数容易获取,无复杂控制理论,可以最大程度保证实时性,提升赛车动态表现。
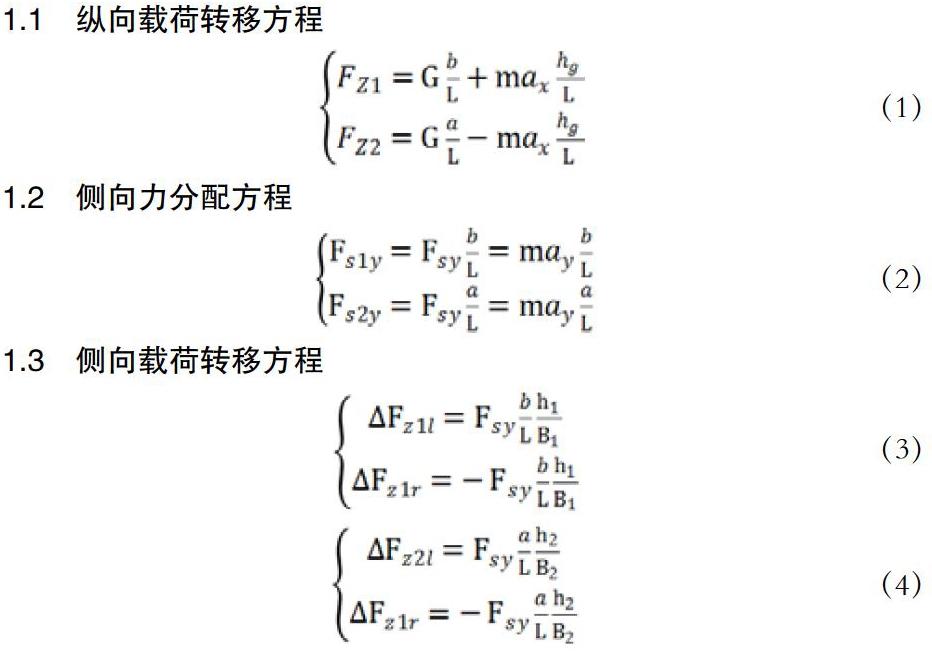
1 参考模型建立
1.1 纵向载荷转移方程
1.2 侧向力分配方程
1.3 侧向载荷转移方程
2 仿真实验
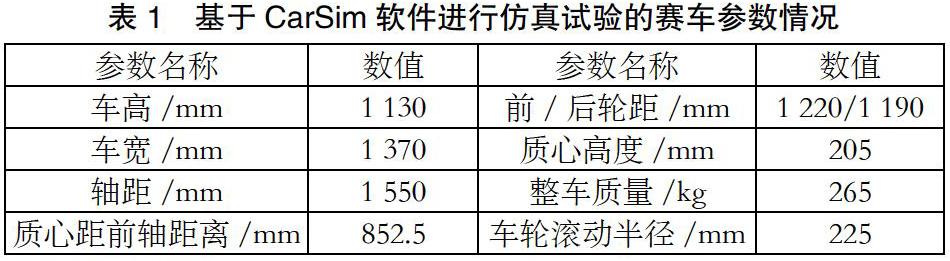
2.1 CarSim车辆模型建立
本文整车模型基于CarSim软件中方程式赛车模型,该车辆模型主要参数如下:
2.2 仿真实验
仿真实验选择了两种典型的实验工况,分别是直线加速实验与角阶跃圆周实验。
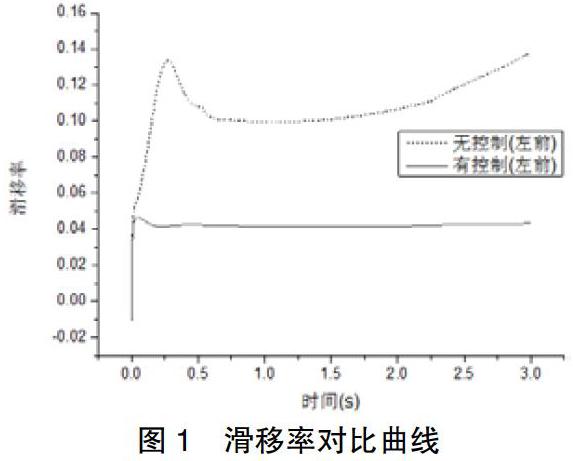
2.2.1 直线加速仿真
从图中可以看出:带有差速控制的车辆将根据轴荷比例对驱动力进行相应调整,降低车轮滑移率,在一定程度上提升车辆动力性能。
2.2.2 八字环绕项目仿真
从实验结果中可以看出:转弯时,带有差速控制的车辆将根据左右轮荷比例对驱动力进行相应调整,可降低车辆的转弯半径,提升车辆稳定性。
3 结论
(1)本文提出的差速控制算法以加速度为基础,建立载荷转移模型,根据载荷比例对需求驱动力矩进行差速分配,能够提升车辆动力性与稳定性。(2)本文提出方法有别于传统稳定性差速控制,以实时性为目标建立驱动力分配控制方法,为赛车的差速控制提供一种新思路。(3)本文提出算法实际是利用了轮胎的动力学特性,在下一阶段应将轮胎模型考虑进来,建立更加完善的差速控制算法。
参考文献:
[1]Jo?o Antunes,André Antunes,Pedro Outeiro.et al.Testing of a torque vectoring controller for a Formula Student proto typel[J].Robotics and Autonomous Systems.113(2019):56-62.
[2]徐寅,陈东.电动汽车差速系统研究综述[J].中国机械工程,2011,22(04):498-503.
[3]柴健等.四轮独立驱动轮毂式电动汽车转向控制策略研究[J].公路与汽运,2014(05):1-5.
[4]崔东林,李卫东.陆轨两用四驱电动车电子差速解决方案综述[J].工业控制计算机,2014,27(011):152-153.
[5]方遒,黄展华,谢丽萍.轻型电动汽车电子差速器设计[J].厦门理工学院学报,2010,18(04):24-29.
[6]孙明江,段敏,李刚.轮毂电机驱动电动汽车电子差速器仿真研究[J].农业装备与车辆工程,2015,53(002):19-24.
[7]Fahimi F.Full drive-by-wire dynamic control for four-wheel-steer all-wheel-drive vehicles[J].Vehicle System Dynamics,2013,51(03).
