市场主流三维激光扫描仪分析及应用研究
2020-08-09孙中胜陈亮
孙中胜 陈亮
摘 要:市场上主流的三维激光扫描仪种类繁杂,本文首先简介三维激光扫描仪的基本原理,接着对比分析市场主流三维激光扫描仪主要技术指标,最后阐述三维激光扫描数据的二次开发的基本方法,促进三维激光扫描仪在相关领域的应用。
关键词:三维激光扫描仪;原理;对比分析;二次开发
中图分类号:TP391 文献标识码:A
0引言
传统的测量方法,大多是基于单个点的测量工作方法和手段,如全站仪。随着测量工作的需要,逐渐扩展为面的测量,三维激光扫描仪被引入到相关应用领域。三维激光扫描仪,它可快速扫描被测的物体,不需直接接触即可直接获得高精度的扫描点云数据,可高效地对真实世界进行三维扫描和虚拟重现,应用范围非常宽广。针对市场上涌现的主流三维激光扫描仪产品,对比分析主流三维激光扫描仪硬件产品技术指标,阐述数据成果的应用,并介绍数据的二次开发的基本方法。
1基本原理
三维激光扫描仪工作原理是发出一束激光束,经过物体的表面反射,又被扫描仪所接收。通过利用扫描仪内部高精度时钟计算激光束的发射和接收时间差,已知激光束波速 c 和时间差t 就可以计算出相对于激光扫描仪系统自定义原点到目标物体表面某一点的距离l ,同时扫描仪的测角系统会自动获取被测物体的水平角度和垂直角度,以实现对目标物体表面各个点的测量。三维激光扫描仪,根据其测距的基本原理不同分为两种基本类型,一种为脉冲式,它发射高强度激光脉冲,通过接受反射回来的激光信号,并记录发射和接受的时间差,从而得到相对于仪器自身与被测物体表面的距离。脉冲式方法具有相对简单、测量距离较远的特点。另一种为相位式,它发射一束高强度的不间断整数波长的激光,通过测量从发射到接受的相位差,已知脉冲信号的频率和传播速度,因此可以计算出物体表面某一点到扫描仪的距离。脉冲式测量具有距离近、但测量精度高的特点。
2主流产品对比分析
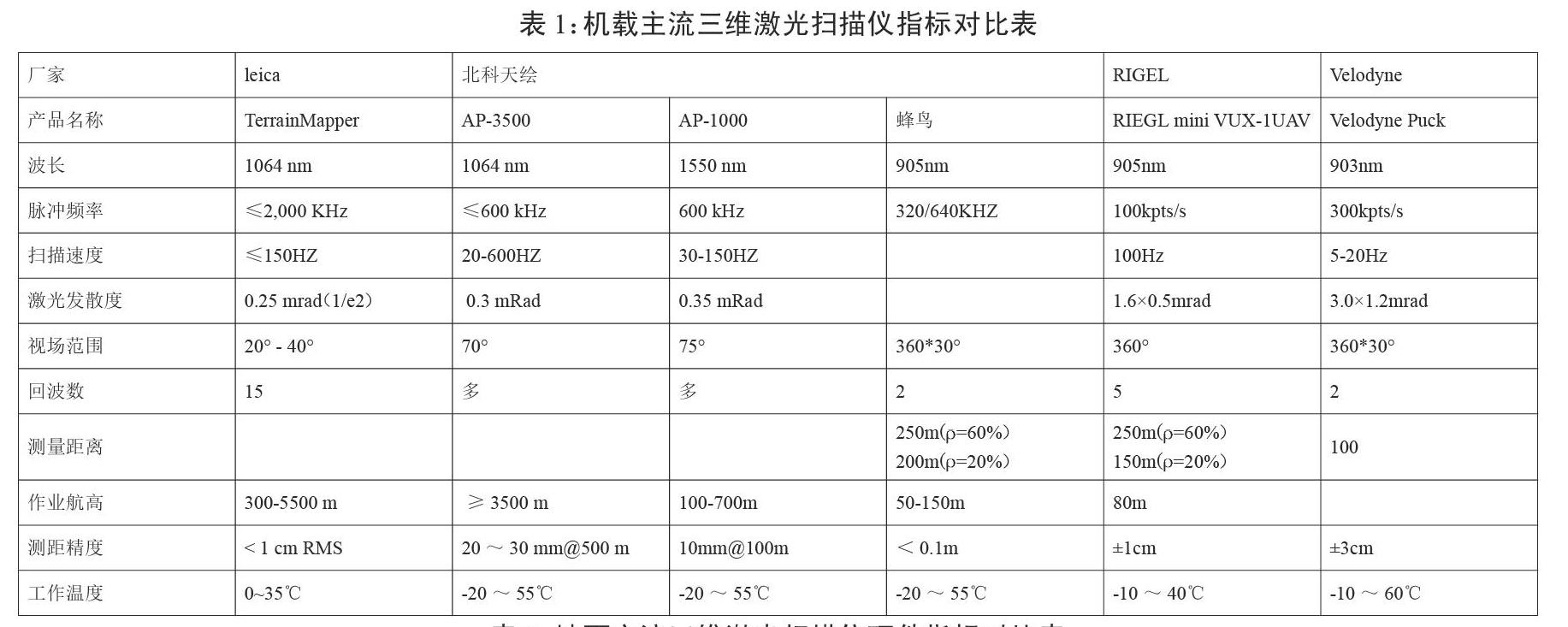
三维激光扫描仪被装载到有人机、无人机、地面等平台上,分别形成机载、地面多种类型的设备,不同的类型,具体应用场合不完全相同。在市场繁多的产品中,选择主流的设备从原理、波长、点频率、测量范围、测距精度、测角精度、激光发散度、扫描频率等性能,分别就机载、地面两大类的各品牌进行对比分析。
机载平台,飞行范围广,应用灵活,被广泛应用,包括有人机高航高模式的和无人机中低航高模式,各主流三维激光扫描仪硬件主要技术指标如下表1所示。
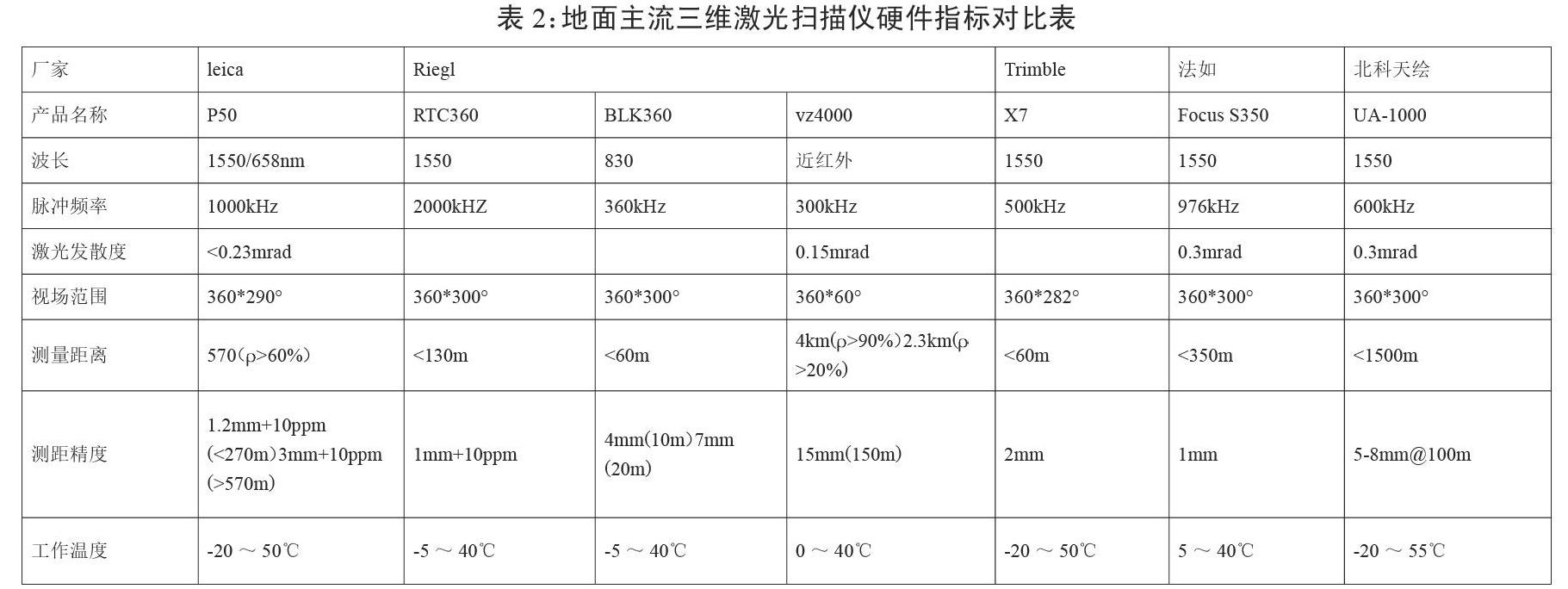
地面架站式三维激光扫描仪,形式类似常规全站仪,由于其便携与低成本,适用于在小范围内完成相关任务的扫描工作,主流的产品主要指標对比分析如表2所示。
3二次开发
三维激光扫描仪获取的数据,俗称点云数据。点云数据的应用开发,一般选择基于已有平台或库基础展开二次开发,现对两种二次开发方法展开说明。
一种为基于点云数据库(Point Cloud Libary,PCL)。它是一个专门用来处理三维点云的跨平台开源库,支持Windows,Linux,Android,Mac OS X等平台。涉及点云处理得大量通用算法,包括点云获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重建、可视化等基础模块,以及人体骨骼识别提取、动作跟踪识别等应用。
另一种为基于CloudCompare的点云处理软件。它最初设计用于比较两个三维点云(例如用激光扫描仪获得的点云)之间或点云与三角网格之间的比较。它是一款优秀的高速点云加载的开源工具,可以方便地使用计算法向量、优化法向量、泊松构网、滤波等功能,支持海量点云显示与加载,有不错的框架,很多公司对该工具进行二次开发以满足公司需要。
4总结
本文在三维激光扫描仪基本原理的基础上介绍市场主流三维激光扫描仪硬件产品,从主要技术指标进行对比分析,并结合数据应用部分的二次开发,介绍两种简单快捷的方法,有利于对三维激光产品的了解,有利于二次开发方法的选择,为三维激光扫描仪的广泛应用奠定坚实的基础。
作者简介:孙中胜,男;1974.7-,汉,吉林乾安县人,本科,本溪钢铁(集团)机电安装工程有限公司,工程师,研究方向:工业设备精密测量。
参考文献
[1]黄传朋.基于三维激光扫描仪的三维地形获取及应用[D].天津:天津理工大学,2019
[2]董秀军.三维激光扫描技术及其工程应用研究[D].成都:成都理工大学,2007.
[3]马立广.地面三维激光扫描测量技术研究[D].武汉:武汉大学,2005.
[4]张启福,孙现申.三维激光扫描仪测量方法与前景展望[J].北京测绘,2011(01):43-46.
[5]王增涛.三维点云数据处理平台设计[D].大连:大连理工大学,2014.
[6]姚艳丽,蒋胜平,王红平.基于地面三维激光扫描仪的滑坡整体变形监测方法[J].测绘地理信息,2014(01):56-59+62.
