基于混合暗通道算法的图像去雾研究
2020-08-07邵明省
邵明省
(鹤壁职业技术学院 电子信息工程学院,河南 鹤壁 458030)
1 引 言
在雾霾天气下,图像场景中物体的对比度下降,影响了图像信息的辨识,导致后续图像细节特征的提取、目标的识别等处理无法正常进行[1]。
He K M等[2]根据暗通道先验(dark channel prior, DCP)理论得到雾霾图像传输图的粗略估计值,可取得良好的去雾效果,但存在计算量太大、效率太低的问题,随后他们又提出了引导滤波(guide filter, GF),获得了较好的复原效果,但引导滤波器的引入带来了去雾不彻底问题。尺度自适应暗通道先验(scale adaptive dark channel prior, SADCP)去雾方法,通过图像的颜色和边缘特征自适应地调节暗通道的尺度范围[3],得到像素级的暗通道求解尺度,兼顾大尺度求解色彩失真小和小尺度求解“光晕”失真小等优点,但是尺度依赖边缘检测的准确度。单幅图像去雾方法(single image dehazing, SID)构造关于图像边缘强度的代价函数,通过最大化局部对比度的方法实现去雾[4],但是在包含有白色物体的图像中该方法会导致大气参数估计过大。双边滤波(bilateral filtering, BF)平滑传输图的细节信息,得到质量良好的去雾图像[5],但是时间复杂度高和内存消耗大。分块来求粗暗通道,进一步提高了暗通道去雾速度[6],但是去雾不彻底。
为了克服暗通道算法去雾处理存在的不足,本文提出混合暗通道算法(mixed dark channel prior, MDCP),通过阈值划分近景区域和远景区域,用最大化相似度评价函数获得微调系数,实验仿真显示本文算法去雾图像视觉效果较好,定量分析指标较优。
2 混合暗通道算法
2.1 大气散射模型分析
Narasimhan S G等[7]对McCartney首次提出的去雾模型进行了改进,效果显著,得到了广泛使用,大气散射模型的成像方程为
I(x)=J(x)t(x)+A(1-t(x))
(1)
式中:I(x)为有雾图像;J(x)为无雾图像;t(x)∈(0,1)为雾化透射率, 其随图像深度值呈指数衰减;A为大气光强度值。
J(x)t(x)为光线传递时的直接减弱项,是景物反射光经雾霾颗粒散射吸收后光强损失的过程;A(1-t(x))为大气光的增强作用,是太阳光经雾霾颗粒散射进入成像设备的过程;去雾的目标就是从I(x)中恢复J(x)、A和t(x)等相关系数。
由Rayleigh大气散射定律知:
(2)
式中:β(λ)为大气光散射系数;d为景物与成像设备间的距离;λ为光波长;γ∈[0,4],γ=0,此时为有雾天气,空气中水滴等颗粒相对可见光波长非常大,γ=4,此时为晴朗的天空,空气中颗粒较小[8]。
文献[2]中暗通道先验模型去雾图像J(x)可表示为:
(3)
2.2 混合暗通道算法
2.2.1 混合暗通道组成
将有雾图像分为近景区域和远景区域[9~16],近景区域暗通道值较小,暗通道值通过最小值通道计算:对有雾图像按像素点取其R、G、B颜色通道中的最小值;远景区域计算通过颜色通道的最大灰度值方法实现。把图像从RGB彩色图像转为灰度图像,统计出有雾图像的灰度直方图和灰度均值L,直方图平滑处理后,从灰度直方图的最大值向最小值寻找直方图数值变化的谷点,与平均灰度值L进行比较,将小于平均灰度值L的第一谷点设为阈值T。通过阈值T来区分近景区域、远景区域,当有雾图像的暗通道值小于T时,将其判定为图像的近景区域,否则为远景区域。
阈值T的大小决定了去雾效果的优劣,一个合适的T值必须使去雾后的图像不失真,且不产生Halo效应,这也就要求透射率图保存足够多的景深信息。T=0时的透射率图等价于最小值通道值计算出的透射率图,此时可认为透射率图保存了完整的景深信息;T=255时的透射率图等价于由暗通道(未经导向滤波)所求出的透射率图。因此需要对对T=0与T=255两幅透射率图进行二值化处理,并找出其中差异区域,随后T以步长1在0~255区域内进行取值,计算出每个T值透射率图在差异区域与T=0时透射图的相似度。图1给出了不同T值下的相似度平均值仿真结果。
图1 不同T值下的相似度平均值Fig.1 Similarity average value for different T value
从图1可知,当T取0~10时,透射率图在差异区域的相似度非常高,并且变化较为缓慢,说明此时透射率图很好地的保存了景深信息;随着T值的增大,相似度下降加快,透射率图保存的边缘信息不再完整;当T取210时,相似度接近于0,此时差异区域透射率取值基本错误,即该区域反映的景深信息错误。本文混合暗通道算法T值初步选定为5。


(4)
式中:α∈(0,1)、β∈(0,1)为微调系数,要求α+β=1。
不同图像的微调系数值不同,当α=0、β=1时,图像去雾主要在远景区域,当α=1、β=0时,图像去雾主要在近景区域。
计算(α,β)组合值透射率图与透射率为0时的相似度,最大化相似度评价函数:
Emax(α,β)=t(α,β)-t0
(5)
当Emax为最大值时,即可获得最佳组合(α,β)值。
2.2.2 近景区域去雾规则
(1)求取各像素点的RGB三通道最小值:
(6)
(2)计算像素点与区域中心点的暗通道光强差值a:
(7)
式中:(i′,j′)∈Ω(i,j),Ω(i,j)表示以(i,j)为中心的区域,i、j分别表示区域长、宽的中心点,i′、j′分别表示像素点在区域的横、纵坐标位置。
(3)若a小于阈值K时,认为该像素点与中心点在同一景深范围;否则为不在同一景深范围,将该像素点光强变为极大值。对于一幅8位图像来说,极大值取255,取值规则为
(8)
式中K表示设置阈值,K=30。
(4)最后对暗通道取最小值:

(9)
2.2.3 远景区域去雾规则
为了避免远景区域中天空区域影响,对原有雾彩色图像阈值T点右侧区域内图像高亮度区域进行RGB三基色通道的强度值进行判断,当三基色相互之间强度值差ρ<35时,认为三基色反映出来的是高亮度白色信号。图2给出了不同ρ与高亮度白色信号强度关系仿真图。
图2 不同ρ与高亮度白色信号强度关系Fig.2 Relationship between different ρ and high brightness white signal intensity
从图2可以看出:当ρ<35时,高亮度白色信号强度下降较快,当ρ>35的时,下降平缓,因此本文选取ρ=35。
遍历远景区域的每个像素,求取每个像素点的RGB三通道的最大灰度值,这些颜色通道的最大灰度值组成的灰度图像即为亮通道图像I(x,y):
(10)
式中Pc(x,y)是输入图像P(x,y)某个颜色通道的灰度值。
由于某像素亮通道的灰度值与该像素的光照强度接近,将待增强的彩色图像的亮通道图像I(x,y)作为光照分量的初步估计值。但是亮通道图像中并非每个像素的灰度值都接近于该像素的光照强度,为了去除部分反射分量较小的物体对光照分量估计的影响,对亮通道图像I(x,y)进行灰度膨胀运算,使该结构元素中心在I(x,y)图像内能逐点滑动,再用I(x,y)中与结构元素重合像素中的最大灰度值替代I(x,y)中与结构元素中心重合的像素灰度值,得到I(x,y)灰度膨胀后的结果It(x,y)。对It(x,y)进行灰度腐蚀运算,使该结构元素中心在It(x,y)图像内逐点滑动,再用It(x,y)中与结构元素重合像素中的最小灰度值替代It(x,y)中与结构元素中心重合的像素灰度值,即可得到光照分量的粗估计值。最后通过双边滤波器对光照分量的粗估计值进行细化处理。
算法流程如下:
(1) 输入有雾图像;
(3) 根据公式(5)计算系数α、β值;
(4) 按照近景区域去雾规则进行去雾;
(5) 按照远景区域去雾规则进行去雾;
(6) 输出去雾图像。
3 实验仿真
为验证混合暗通道在雾霾天气下的视觉去雾效果,使用Matlab7.0仿真,计算机配置CPU为i3系列7100,主频3.90 GHz,内存DDR4主频2666容量4 GB,采用算法有DCP、GF、SADCP、SID、BF以及本文算法MDCP。
3.1 视觉效果分析
不同算法对有雾图像的去雾效果如图3所示。
从图3的对比实验结果可以看出,DCP去雾效果自然,边缘细节保留完好;GF在细小边缘区域去雾效果较差;SADCP去雾之后的色彩就会过于饱和;SID去雾后图像依旧有雾;BF能够消除大部分的边缘效应,但还是有一部分边缘无法消除。而本文MDCP算法在大面积白色高亮区域没有色彩和灰度失真,在细节处理上不会因为过度增强引起画质降低,图像细节完整,天空色彩更接近自然色。
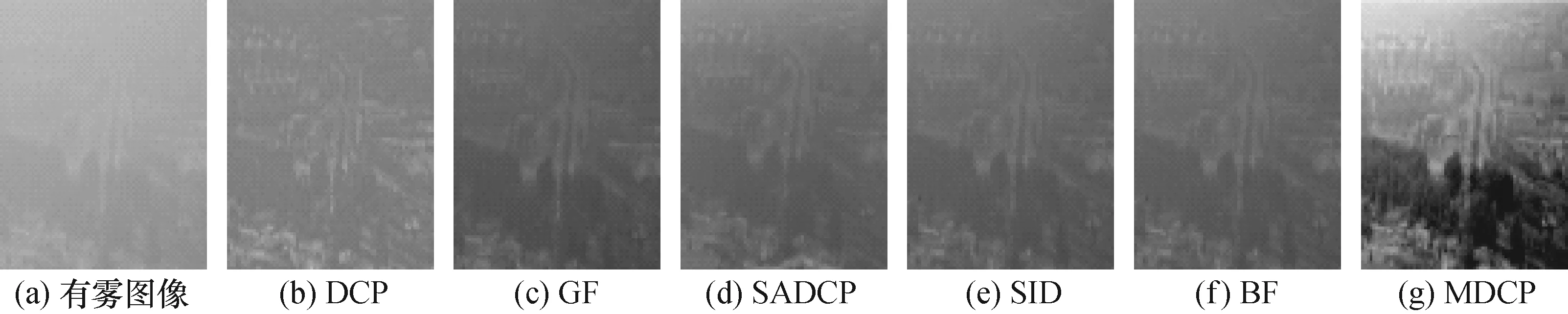
图3 不同算法对有雾图像的去雾效果Fig.3 Effect of different algorithms for image dehazing
3.2 图像去雾评价指标
使用评价图像去雾效果的函数包括:图像熵H,对比度d。
图像熵计算公式为
(11)
式中:p(ω)表示亮度为ω的像素点概率密度。
若图像的像素能够平均分布在255个灰度级上,此时图像细节最多,图像熵最大,但是若所有像素点集中于同一灰度级,则图像信息熵为0。
图像灰度反差的大小通过对比度d分析:
(12)
式中:δ(x,j)为相邻像素的灰度差;pδ(x,j)为δ的概率;d值越大图像越清晰。
对图3中有雾图像去雾后的评价指标分析如图4所示,其中通过30次蒙特卡罗实验获得。
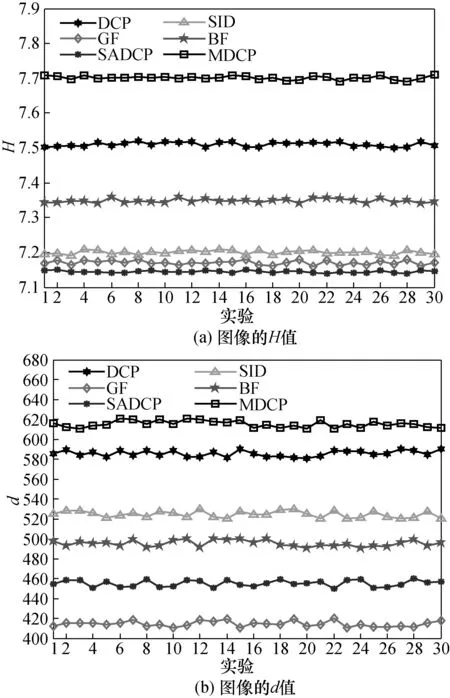
图4 评价指标分析Fig.4 Evaluation index analysis
从图4的分析结果可以看出,本文MDCP算法在图像熵、对比度好于其他算法,各个评价指标均有明显的提升。
4 总 结
本文采用混合暗通道算法,通过阈值划分近景区域和远景区域,最大化相似度评价函数获得微调系数,近景区域和远景区域采用不同的去雾策略。实验仿真表明:本文算法去雾图像视觉效果较好,定量分析指标较优,为暗通道图像去雾提供了一种有效的新方法。
