重载货运列车自动驾驶控制技术研究
2020-08-06杜凯冰张征方文宇良
杜凯冰,张征方,文宇良
(中车株洲所电气技术与材料工程研究院,湖南 株洲 412001)
0 引言
重载铁路运输作为大宗物资运输具有运量大、成本低、全天候等优势。传统的重载铁路货物运输主要采用人工控车,一方面,由于重载货物列车编组长、载重大,增加了司机操作的难度;另一方面,长时间控车,司机容易疲劳驾驶,从而导致操作失误。司机的操纵失误会导致列车纵向冲动大、非正常停车、超速甚至是断钩等现象发生,严重威胁铁路行车安全。为进一步提升运量、节约成本、降低司机工作强度,进行重载货运列车自动驾驶控制技术研究与应用推广是有效解决方法之一。
国内外相关领域的学者与专家对货运列车自动驾驶进行了比较深入的理论研究。文献[1-2]研究了基于神经网络的货运列车速度曲线规划算法,实现了列车优化速度曲线和操纵工况序列的规划计算。文献[3]通过构建货运列车优化操纵基本规则集与专家系统,研究了节能优化操纵算法。文献[4]将列车控制问题抽象为多分类模型,研究了增量特征学习的深度网络在线学习方法。文献[5-6]研究了列车预测控制技术及仿真,讨论了列车参数变化对控制效果的影响。虽然相关研究积极推动了货运列车自动驾驶控制理论的发展,但由于货运列车自动驾驶与应用强相关,相关理论成果仍然有待实际应用的进一步验证。在货运列车自动驾驶应用方面,文献[7]研究了内燃机车运行操纵优化系统,该系统主要通过行程预规划辅助机车乘务员节能优化操纵。澳大利亚力拓公司在2012 年启动了重载列车自动驾驶计划[8],2018 年在澳大利亚首次使用自动驾驶列车成功交付铁矿石,成为重载货运列车自动驾驶领域的一个重要里程碑[9]。当前,国内外相关铁路公司都加大了对重载列车自动驾驶研发的投入力度,开展其相关技术的研究工作具有重要的理论意义与应用价值。
本文研究了重载货运列车的自动驾驶控制技术,并提出了一种融合线路与信号的重载货运列车自动驾驶目标曲线规划与控制方法,成功在西康线铁路进行了全程自动驾驶试验。试验结果表明,该方法能很好地满足实际应用需求。
1 重载货运列车自动驾驶控制系统简介
本文研究的重载货运列车自动驾驶技术在充分利用现有机车系统基础上,通过在列车上加装自动驾驶控制单元来达到自动驾驶目的,实现方式简单、高效。图1 示出重载货运列车自动驾驶控制系统与列车其他系统的关联关系。自动驾驶控制单元接收来自列车运行监控系统(LKJ 单元)、列尾单元、网络控制单元及空气制动单元的信息,同时发出相应的自动驾驶控制指令到网络控制单元和空气制动单元,以实现列车的自动驾驶。

图1 自动驾驶控制系统与其他系统的关联关系Fig.1 Relationship among autonomous driving system and other systems
LKJ 单元[10]为自动驾驶提供信号、LKJ 控制模式、编组、列车总重、机车/货车类型、货物类型、列车计长、车辆辆数、坡道、弯道、分相、列车位置、位移、速度(LKJ 速度)及动态限速(ATP 速度)等信息。列车网络控制单元执行自动驾驶控制单元发出的牵引/电制动控制指令,并反馈列车当前速度(Tcms 速度)、当前实际发挥牵引/电制动力、最大可用牵引/电制动力等实时状态信息。列车空气制动单元执行自动驾驶发出的空气减压控制指令,并反馈制动缸压力、列车管减压量及充风流量、均衡风缸压力等信息。列尾单元为自动驾驶系统反馈尾部实时风压信息。
2 重载列车纵向动力学建模
重载列车纵向动力学模型主要包含列车多质点动力学模型、阻力模型与空气制动模型。
2.1 列车多质点动力学模型
重载货运列车在不同编组、不同线路条件及不同运行工况下,全列车各车辆相互之间的纵向作用力均不相同,因此采用多质点动力学模型[11-13]对列车进行受力分析,并将每节车辆作为一个单独质点来考虑。车辆运动与受力关系如图2 所示,其中F1为机车牵引力(分析对象为机车时,有该作用力;分析对象为货车时,无此作用力),fj为前车作用力,fj+1为后车作用力,Wj为车体所受阻力,Bj为制动力。单辆车的运动方程为

式中:mj——第j车的质量,j=1,2, …,n;xj——第j车的位移;aj——第j车的加速度。

图2 列车受力与运动关系模型Fig.2 Train force and motion model
利用列车动力学模型进行目标曲线规划时,需考虑车辆所处坡道对列车总阻力的影响。在列车自动驾驶起车控制、停车控制与平稳性控制时,需要考虑车钩的拉伸和压缩情况对列车运行的影响,车钩缓冲器特性参考文献[11];实际自动驾驶控车时,主要通过控制车钩拉伸时间、车钩压缩时间和牵引力/电制动力的施加时间来实现对应目标。
2.2 阻力模型
列车阻力模型参考文献[12-13],使用式(2)计算:

式中:m——列车质重;g——重力加速度;W0——单位基本阻力;Wp——单位坡道阻力;Wr——单位弯道阻力;Ws——起动阻力。
W0,Wp和Wr分别使用式(3)~式(5)进行计算:

式中:a,b,c——与车辆类型相关的常数;i——坡度千分数;A——系数,取值范围为450~800;R——曲线半径。
Ws既可根据列车类型取值,如电力机车可取5 N/kN,货车车辆可取3.5 N/kN;也可根据应用需要选取适用值。
2.3 空气制动模型
列车施加空气制动时,制动缸的压强是逐渐上升的。由于压缩空气在列车管内的传递需要一定的时间,且各节车不会同时增压,故自动驾驶列车施加空气制动时也会经历3 个阶段:无制动力的纯空走阶段、全列车闸瓦压力由零上升到预定值的上升阶段以及全列车闸瓦压力保持稳定的阶段。
为了方便实际应用,目前普遍采用的方法是将列车空气制动施加简化成两个阶段[12-13]:(1)空走阶段,即从施加制动到制动力突增的阶段;(2)有效制动阶段,即从制动力突增瞬间到制动力稳定的阶段。空气制动[12-13]计算模型如下:

式中:Sz——制动距离;Sk——空走距离;Se——有效制动距离;v0——制动初速;vm——制动末速;tk——空走时间;φh——闸瓦(闸片)换算摩擦因子;——列车换算制动率;λ——制动计算系数;βc——常用制动系数;ω0——列车单位基本阻力;im——制动地段加算坡度千分数。
3 自动驾驶控制技术
本文研究的重载货运列车自动驾驶控制技术主要包括目标曲线动态规划与实时控制(图3)。目标曲线动态规划是根据线路信息、信号状态与列车动力学模型,以位置信息为变量,规划出前方一定距离内的目标速度、目标级位、目标工况及目标减压量等状态信息,为列车实时控制提供控制前馈量。实时控制是根据规划的目标状态与机车反馈的实际状态发出相应的控制指令,并在异常或故障工况下进行安全导向控制。运行过程中,目标曲线也会根据信号信息和列车实时状态信息进行动态规划。

图3 重载货运列车自动驾驶控制原理Fig.3 Autonomous driving control principles for heavy haul train
3.1 自动驾驶目标曲线动态规划
自动驾驶目标曲线规划可根据信号、线路、限速与列车状态等信息来动态规划前方行车线路上的目标曲线,也能根据列车反馈的实时状态以及基于上述信息的变化情况实时动态规划得到能满足重载货运列车安全、平稳运行的目标曲线。如果在列车运行过程中出现前方线路限速或信号灯状态变化等情况,为满足前方运行的要求,列车会重新规划目标曲线。自动驾驶目标曲线规划主要有以下几个步骤:
(1)初始条件与边界条件获取
初始条件与边界条件主要有线路信息、列车信息和信号信息。
线路信息包含线路限速、车站、坡道、弯道、位置及分相等。列车运行线路剖面示意如图4 所示。

图4 线路与信号示意Fig.4 Schematic diagram of railway line and signals
列车信息包含列车总重、列车长度、货车车辆数、机车牵引/制动特性、空气制动特性、列车编组、轮径和列车实时状态。
信号信息包含行车前方的信号灯以及信号灯所处位置等。信号信息有三显示信号和四显示信号等。图4 所示区间信号为三显示信号,行车前方信号灯有绿灯、黄灯和红灯。若区间信号信息为四显示信号,行车前方信号灯则会有绿灯、绿黄灯、黄灯和红灯。
(2)列车模型计算
根据式(2)~式(6),可计算出列车的基本阻力、坡道阻力、弯道阻力、空气制动距离等信息。
(3)目标曲线规划计算
目标曲线规划以列车安全运行为前提,规划计算时满足式(7)中速度、力与加速度约束。

式中:vn,Fn,an——第n个位置对应的速度、力和加速度;βv——速度步长系数;βF——力步长系数;Δv——速度步长;ΔF——力步长;Δa——加速度步长。
βF和ΔF的选取需以确保列车自动驾驶不超速、能安全运行为前提,Fn的取值需要确保运行工况不频繁转换,an的取值需要确保列车自动驾驶平稳运行。
(4)输出目标曲线
执行步骤(1)~(3),直到得到满足要求的目标曲线,输出目标曲线。
3.2 自动驾驶安全导向控制
安全是铁路运输的重中之重,列车自动驾驶也必须保证列车运行安全。本文研究了列车在异常或故障情况下对应的安全导向控制方法,其针对常见的异常或故障状态采用主动安全控制;针对运行中潜在的超速或掉入分相区等风险,则主动触发安全规划和安全导向控制。图5 示出列车自动驾驶安全导向控制框图。
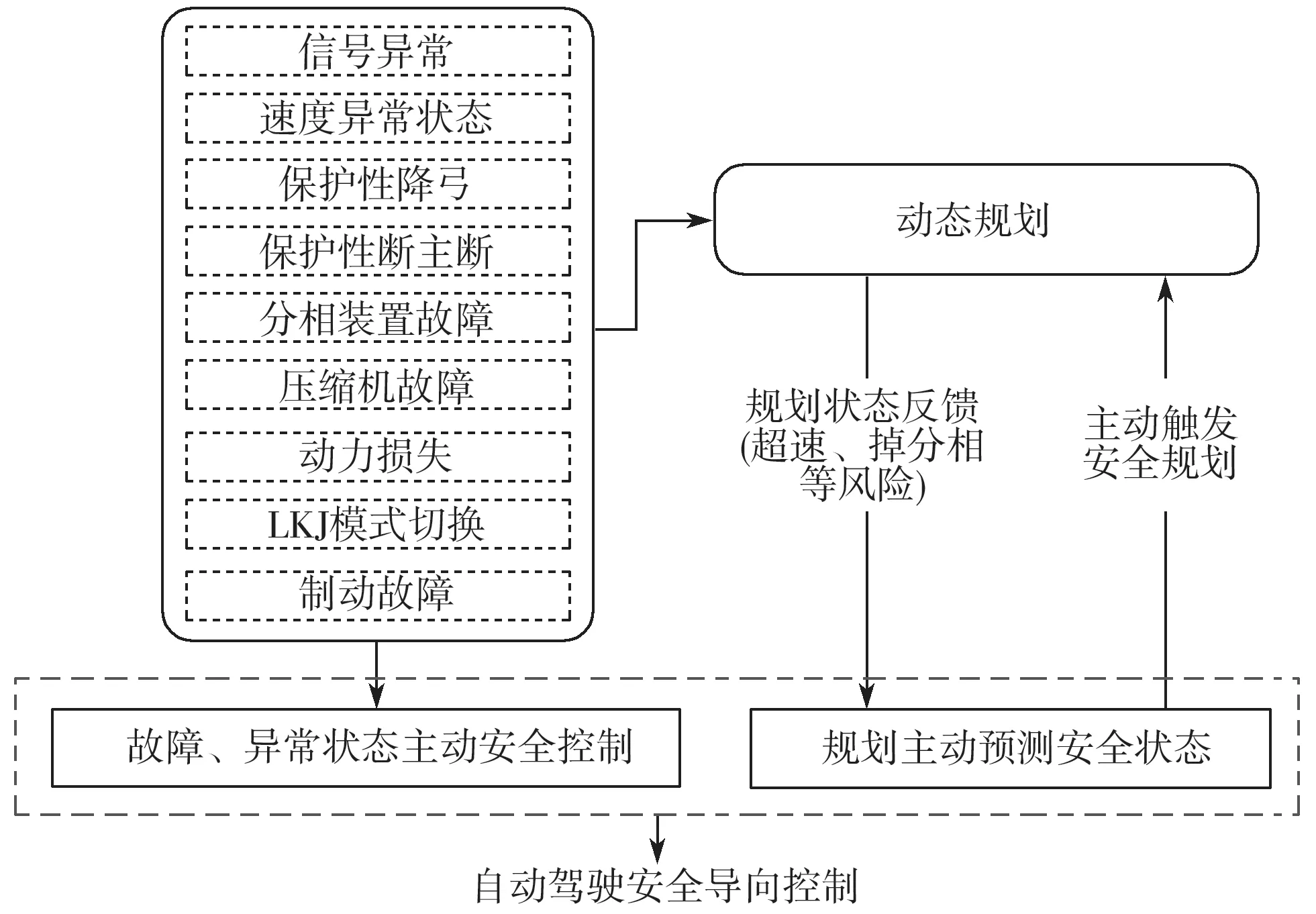
图5 列车自动驾驶安全导向控制框图Fig.5 Block diagram of the safety-oriented control for autonomus driving of train
当发生常见的故障或异常情况,如线路信号异常、速度异常、保护性降弓、保护性分主断、分相装置故障、压缩机故障、动力损失、LKJ 模式切换及制动异常与故障等,自动驾驶控制系统进行对应控制级别的安全导向控制。主要有3 级:
(1)第一级控制,利用文本或语音进行提示,注意列车运行,维持列车自动驾驶运行;
(2)第二级控制,利用文本或语音提示人工接管,维持电制动,提示持续一定时间后进行常用初制动保护,安全导向列车减速运行;
(3)第三级控制,包括常用制动/惩罚制动保护、文本或语音提示及列车停车控制。
4 试验验证
为了验证本文提出的列车自动驾驶控制方法的效果,在西康铁路线安康东站至旬阳北站区间进行了货运列车自动驾驶试验。试验线路区段公里标范围从K303+906 到K220+656,区段内坡度平缓,无长大上坡和长大下坡。试验列车由HXD1 型电力机车牵引,货车编组51 辆,列车计长64.8 m,总重1 193 t(不含机车)。试验区段内,行车前方的信号为通过信号;到达目标车站时,信号为停车信号。
图6 示出货运列车全程自动驾驶的试验数据,试验涵盖“自动零速起车-区间自动运行-自动停车到零”整个过程,试验结果包括ATP 速度、实际速度(Tcms速度、LKJ 速度)、目标力、实际力和实际级位。自动驾驶控制包括零速起车、加速控制、减速控制、贯通试验、过分相、停车到零等运行场景。
(1)零速起车
零速起车表示自动驾驶控制系统根据列车所处的坡道和列车载重情况控制列车速度从零开始上升至正常运行速度。图6 中标示的“零速起车”为列车在站内平坡道零速起车试验情况。在0~7 s 时间范围内,由图中实际力曲线、速度曲线可知,此时实际力为164 kN,实际速度为0 km/h,此阶段内列车车钩经历由压缩转变到拉伸的状态变化过程;在7~30 s 时间范围内,列车实际力仍然维持在164 kN,控制列车速度逐渐由零增长至5 km/h,自动驾驶控制列车零速起车成功。
(2)加/减速控制
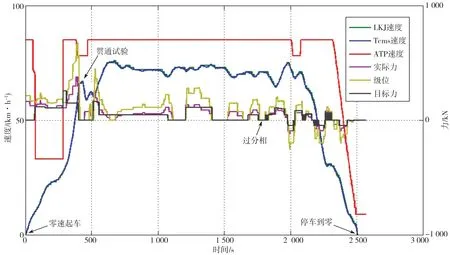
图6 列车自动驾驶试验结果Fig.6 Experimental results of the train autonomous driving
根据图6 中实际力曲线、速度曲线可知,列车在零速起车成功并且驶离车站之后,在牵引力作用下加速运行,在79~286 s 时间范围内,列车经过ATP 速度为33 km/h 区域时,控制列车不超速;在286~406 s 时间范围内,列车实际牵引力由105 kN 增加至300 kN,控制列车速度由28 km/h 提高到约65 km/h,以确保列车能顺利进行贯通试验。在2 179~2 263 s 时间范围内,列车由电制动力控制速度,该阶段是典型的减速控制,列车速度由56.7 km/h 降至31 km/h。比较该时间内的实际力与目标力的偏差可以发现,自动驾驶控制对实际电制动力进行了动态调节以实现减速控速目标。
(3)贯通试验
贯通试验是根据操作规程[14-15]要求,列车停车再起动后,应选择适当地点进行贯通试验(列车制动性能动态试验),以了解该趟列车制动闸瓦力的强弱,以此作为该列车的行车参考。图6 中标示的“贯通试验”为自动驾驶控制列车进行贯通试验,在425 s、列车速度为66.5 km/h 时,自动驾驶控制系统施加空气制动减压指令、目标减压量50 kPa,列车空气制动单元执行减压指令并实时反馈列车管减压情况;在时间为448 s、列车速度降到61.7 km/h 时,符合贯通试验降速要求,自动驾驶自动缓解空气制动,成功完成了贯通试验。
(4)过分相
观察图6 中“过分相”的目标力、实际力与级位曲线,在1 772~1 801 s 时间范围内,列车的目标力、级位与实际力均为0。这是自动驾驶控制基于分相信息,根据列车过分相要求提前规划出列车过分相的目标力为0,列车过分相时执行目标力指令。在通过分相之后,给出“分相通过”信号,列车成功完成过分相试验。
(5)停车
根据图6 中的实际力曲线、速度曲线可知,列车在接收到停车信号后,在2 368~2 428 s 时间范围内,一直用电制动力控制列车减速,列车速度由24 km/h 降到10 km/h;在2 491 s、速度为5 km/h 时,控制空气制动减压50 kPa;在2 500 s、速度为2 km/h 时,追加空气制动减压至110 kPa;在2 504 s 时,列车速度为0,成功实现了自动停车速度到零。
5 结语
针对重载货运列车运行,本文研究了在实际线路、信号状态条件下的货运列车自动驾驶目标曲线规划与控制技术,以及列车在故障或异常情况时的安全导向控制方法。在西康线铁路进行了列车自动驾驶控制试验,成功实现了重载货运列车“自动零速起车-区间自动运行-自动停车到零”,试验结果表明,本文所提方法可以有效实现货运列车自动驾驶。为进一步提高自动驾驶货运列车运量,后续将对无线重联编组模式下重载货运列车的自动驾驶控制技术进行研究。
