一种可重构移动作战平台对接机构设计与实验
2020-08-05唐术锋王国庆郭子瑞
唐术锋,王国庆,郭子瑞
(内蒙古工业大学, 呼和浩特 010051)
可重构赋予了机器人自主变形的能力,相对于传统的机器人具有显著的功能和经济优势,特别在军事、救灾搜索、海洋探测等众多非结构性环境具有广阔的应用前景[1-2],受到了国内外科研机构越来越多的关注。对接机构作为自重构移动作战平台结构设计的重要部分,灵活可靠的对接机构是机器人实现重新构型的重要基础[3]。根据对接机构模块的运动能力可以分为两类[4]:第一类是关节模块,模块本体不具有运动能力。国内外研制出的关节模块有葛为民等研制的M2SBot模块[5],利用独特的正弦加速度槽凸轮式对接锁紧机构;上海交通大学费燕琼等人研制的M-Cubes模块,通过驱动连接面的旋转和销的伸缩来完成对接[6];AIST 的M-TRAN Ⅱ模块[7],其对接面上的磁铁吸合实现连接,脱离时则由形状记忆合金(SMA)受热伸展提供驱动力。另一类为自主移动模块,其优点是单体模块可以移动,也可以通过对接机构实现对接。国内外研制的自主移动模块有瑞士Swarm-Bot模块[8],它配备了主动和被动两种对接方法,可以实现抓取相邻单元或被相邻单元抓取;北京航空航天大学[9-10]研制的履带式模块机器人JL-2,提出了一种抓持式对接机构上述连接机构在一定程度上实现了自重构机器人的连接和分离功能;哈尔滨工业大学何成林等[11]设计了基于电磁铁的卡爪、卡盘对接机构。但对于已经投入使用的大多数小型移动机器人,其对接机构存在着容错性差,对接不牢靠以及不能实现柔性对接等问题。这些问题的关键在于对接机构不具备自适应能力,具有一定自适应能力的对接装置,其机构相对复杂。针对以上问题,设计了一种具有自锁功能且对接简单可靠的对接机构,分析了对接机构的工作原理,进行了整体结构设计和机构力学分析,用ADAMS机械系统仿真分析软件对对接机构模型进行运动学仿真,最后进行了实物实验研究。
1 对接机构设计
1.1 对接机构原理性分析
经过对现有投入使用的可重构移动作战平台分析可知,对接机构是整体作战平台系统的重要一环,其不仅可以体现移动作战平台的可重构性,还可以提高单一作战平台的越障性能,实现多机协作作战的新模式,如图1。
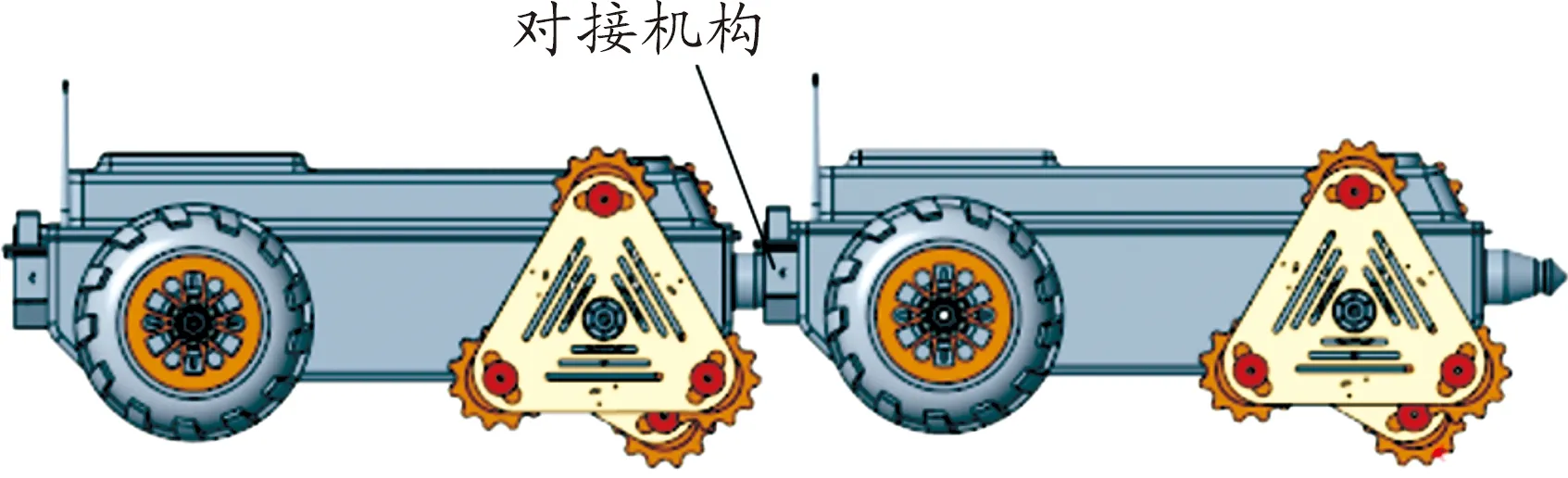
图1 多机协作作战平台示意图
在高低起伏的地形环境下,可重构作战平台刚性对接的实现难度非常大,但在现实情况中高低起伏的地形对于自重构移动作战平台却是十分寻常的情形。为了使自重构移动作战平台具有一定的自适应能力和满足所需要的柔性对接能力,就需要将之前对接机构的完全约束转变为欠约束,但欠约束的同时也对连接的可靠性产生了很大的影响。对于崎岖地形的柔性对接问题,其可行性解决思路为:将对接机构和可重构移动作战平台的连接部分做成球铰机构,运用球铰关节部分一定的自适应和保持能力提升对接机构的可靠性。其对接机构原理如图2所示,对于对接机构的关键部分锁紧装置,其设计也需要具有一定的被动自适应能力,为此锁紧机构的锁定采用“孔-销”的锁定方式。具体来看:选定使用连杆滑块机构,并利用弹簧来限位的装置,随着对接头弧面的曲率半径的不同,锁紧装置会在弹簧和对接头的共同作用下上下滑动,使其具有很强的可靠性、稳定性。由于该对接机构具备一定的纠偏能力和较大的灵活性,在相位偏差较大的情况下也能实现成功对接。
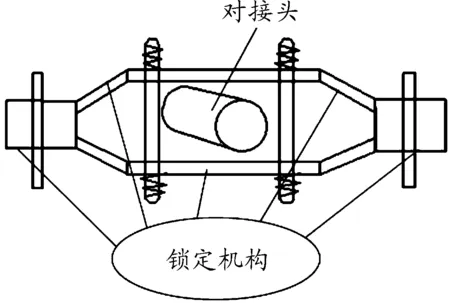
图2 对接机构原理示意图
1.2 对接机构整体结构设计
对接机构整体结构由对接头装置,对接座及安装在上的对接锁紧装置组成。对接头装置是由锥形对接头,连接在锥形对接头的向心关节轴承和支撑弹簧组成,如图3所示。锥形对接头大致由三段构成,第一部分为圆锥构型,在对接过程中推动限位杆移动,使对接机构能够顺利进入。第二部分为圆弧面,其主要作用是与限位杆圆弧面相配合起到限位作用;第三部分为阶梯圆柱构形,其直径最小的杆与关节轴承相连。
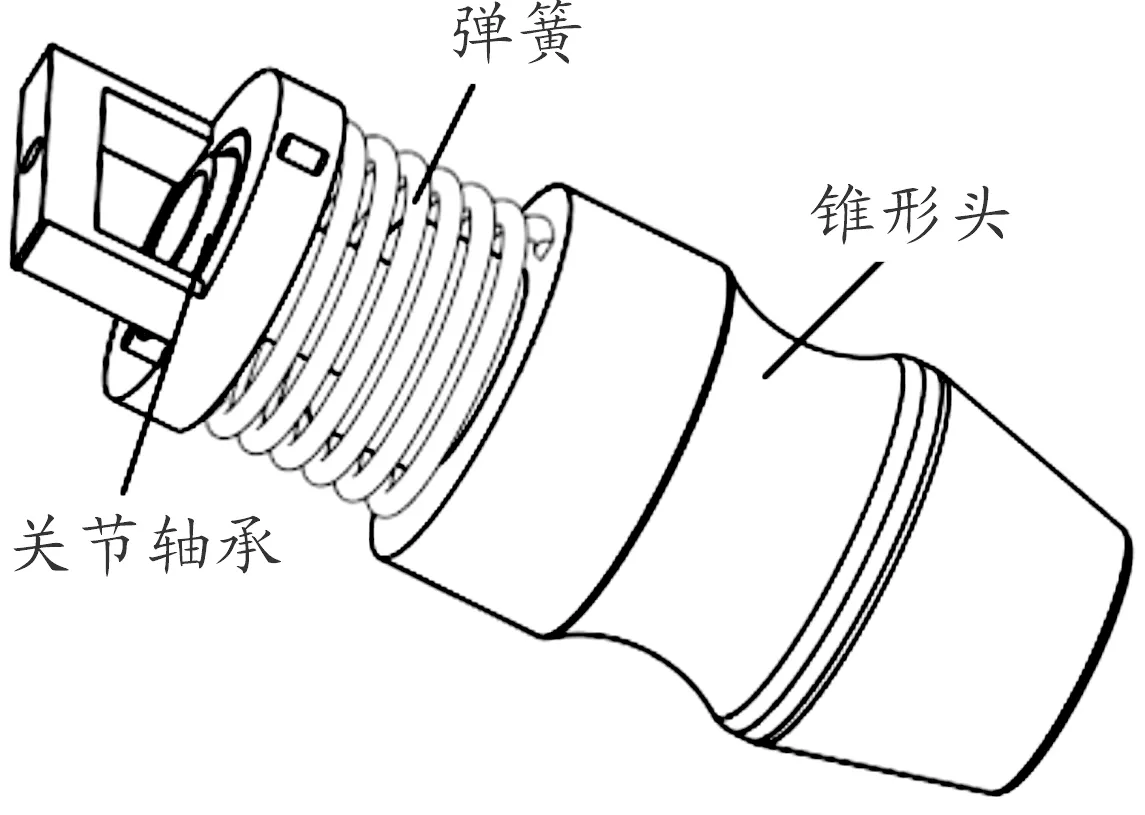
图3 对接头装置结构示意图
对接座上有比对接头稍大的圆孔,可以起到辅助定位的功能。对接锁紧机构主要由电磁销、锁紧杆、限位滑块、弹簧、连杆、滑动支杆组成,如图4所示。当两个移动机器人开始对接时,锥形对接头的头部首先接触锁紧杆并随着头部尺寸的增大,使锁紧杆不断上移并且压缩弹簧,同时在连杆的带动下限位滑块在支撑杆上滑动。当越过锥形连接头的最大直径,锁定杆在弹簧的作用下向下移动,锁定杆的圆弧面和锥形连接头的圆弧面相配和实现了限位步骤。但此时的对接头并没有被锁死,仍能在微小移动机器人前后移动下脱离限位杆的限制。此时的限位滑块在连杆的带动下到达预先设定的位置,此时电磁销动作将阶梯轴插入到限位滑块环形槽的中间锁定位置,实现了对接机构的锁定步骤。当自重构机器人分离时只需要将电磁销断电,其梯形杆将会弹出,从而限位滑块又能左右滑动,实现了解锁功能。
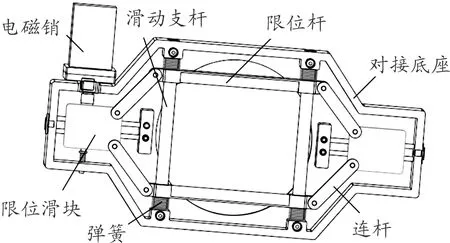
图4 对接锁紧机构结构示意图
2 锁紧机构静力学分析
基于虚功原理,对锁紧机构连杆进行静力学分析,计算得到外力和各个连杆之间的作用力关系。首先将锁紧机构简化为由杆l1~l6组成的六杆机构,同时在l1、l2杆上部连接有弹簧。l1、l2为滑动杆,l3~l4为转动杆。并建立直角坐标系,如图5所示。设外力Fl1=Fl2,且分别垂直作用于l1、l2杆的中间。设l2与l6夹角为β,同时简化六杆机构中各个铰接点的约束均为理想约束。根据虚功原理可以得到:
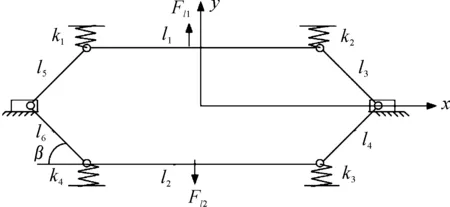
图5 六杆机构示意图
(1)
即
(2)
k1=k2=k3=k4,δl1=δl2
化简可得式(3):
(3)
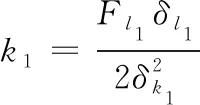
根据锁紧机构到达最高点时的k1与Fl1的关系,对于简化了的六杆机构中的各个杆件进行受力分析,并且建立受力模型。杆l1的受力情况如图6所示。
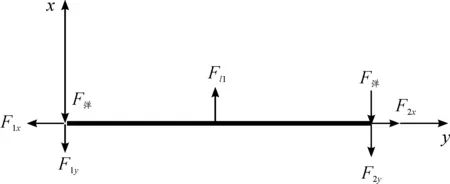
图6 杆l1受力情况示意图
根据受力平衡以及在坐标原点的转矩平衡条件,可以得到如下平衡条件:
∑FX=0;F2X-F1X=0
(4)
∑FY=0;Fl1-2F弹-F1y-F2y=0
(5)
∑MO=0;F弹·l1+F2y·l1-0.5Fl1·l1=0
(6)
即:
0.5Fl1·δl1·l1+F2y·l1-0.5Fl1·l1=0
(7)
杆l3的受力情况如图7所示,将杆l1受杆l3的反力沿x、y轴分解为两个方向的分力,杆l3与x轴的夹角为α。
图7 杆l3的受力情况示意图
根据受力平衡以及在坐标原点的转矩平衡条件,可得到以下式(8)~式(10):
∑FX=0;F2X-F1X=0
(8)
∑FY=0;F3y-F4y=0
(9)
∑MO=0;F3xsinα·l3-F3ycosα·l3=0
(10)
3 基于ADAMS软件的对接机构仿真
首先,将弹簧在PTC中柔性化,并将其文件保存为x_t格式的文件并将其导入到ADAMS中,按照实际情况对于其余零件进行材料的添加。为了方便约束添加,对零件进行着色处理。
模型简化对于仿真运算非常重要,它不仅让你明确模型的运动轨迹,也对于模型有了更深层次的认识。为了减少模型的运算时间和运算量,对模型进行以下简化:
1) 除了在PTC中定义过柔性零件的,其余零件均设置为刚性零件。
2) 对于模型中不参加运动的零件或参与运动也可作为一个整体的零件进行布尔运算操作。
在模型模型简化之后,对于模型进行约束和驱动的添加,点击仿真按键进行仿真,其对接过程如图8(a)~(c)所示。

图8 对接过程示意图
由图8可知,对接过程分3个步骤:1) 对接头即将于限位杆接触时;2) 对接头最大直径处与限位杆接触时;3) 对接头凹槽处与限位杆接触时。
在对接的整个过程中,限位杆力与力矩随时间变化的曲线如图9。初始时刻,对接头未与限位杆接触时力与力矩不随时间变化而变化;2.8 s时,对接头开始与限位杆接触,力与力矩开始产生变化,并分别在4 s和3.7 s处达到峰值;在4.8 s时完成对接,力与力矩曲线回归到原始点位。

图9 限位杆力与力矩变化曲线
在对接过程中弹簧变形量和力的变化曲线如图10,初始时刻,对接头未于限位杆接触时弹簧的变形量与力不发生变化;2.8 s时对接头与限位杆开始接触,变形量与力开始变化,并在4 s处同时到达峰值,峰值分别为2.5 N和0.5 mm,对应的最大变化量分别为2.5 N和2.5 mm;在4.8 s时完成对接,弹簧的变形量和力回归到原始点位。
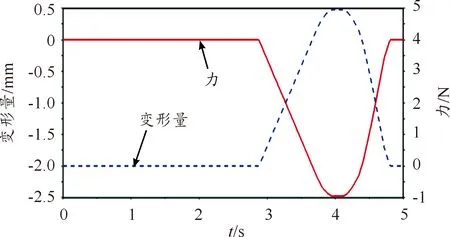
图10 弹簧变形量与力的变化曲线
4 对接运动实验与分析
首先对于对接机构进行实验平台的搭建,如图11所示,并基于对接机构的特性设计了3种不同位置和姿态的实验方案,同时对于对接机构进行了连接强度测试。

图11 实验平台
1) 对接头装置与对接座机构轴线在同一水平面上,将对接头装置、对接座固定在可以滑动的支架上,并将电磁销的接线连接好。实验人员手动缓慢推动对接座,将限位杆推到对接位置时,然后电磁销动作将梯形轴插入锁定位置实现锁定。如图12所示,实验人员松手发现对接座后面的砝码悬在空中,表明完成了对接。实验表明,对接机构能够承受3 N的轴向拉力,具有较好的连接稳定性。
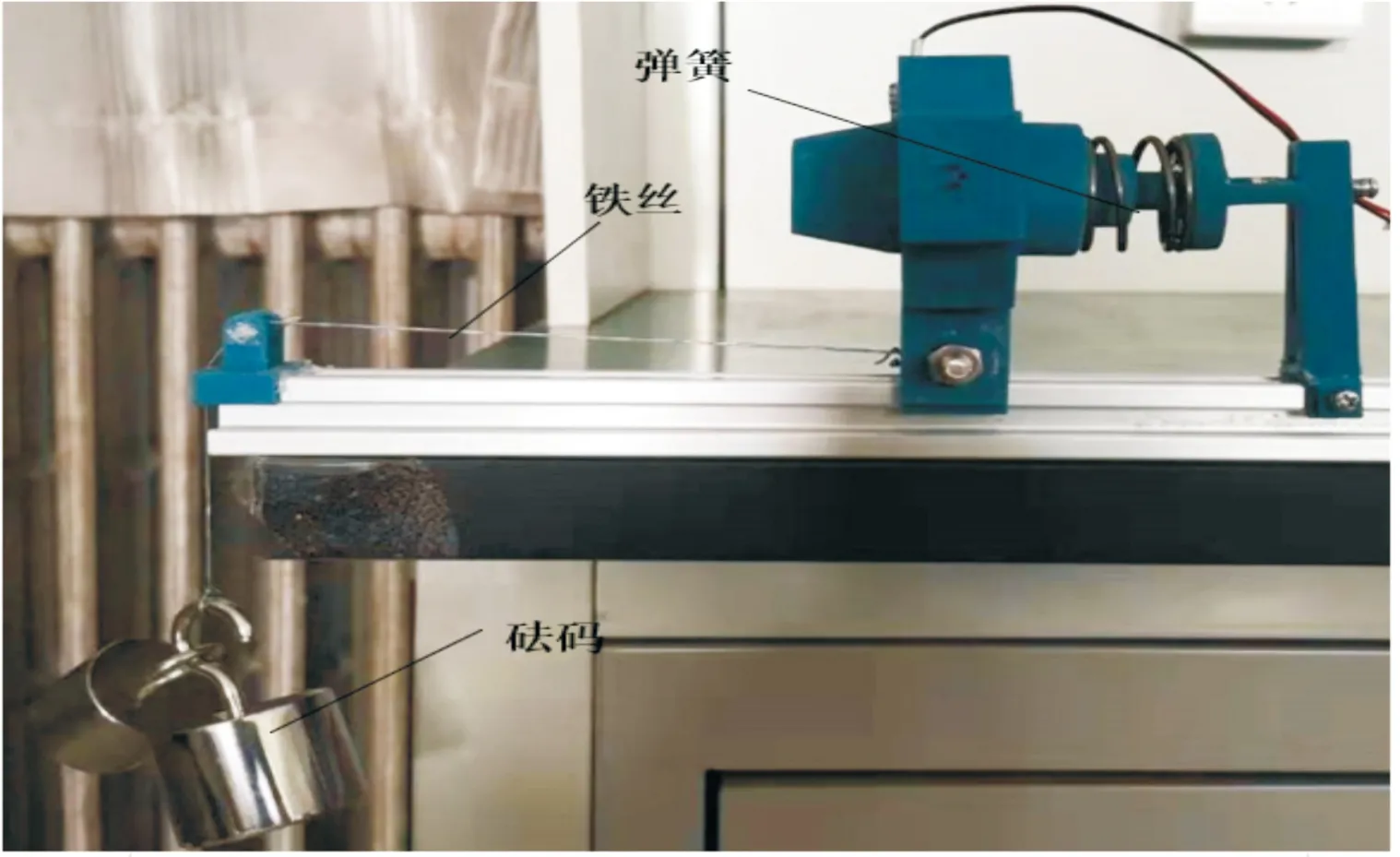
图12 对接完成(连接强度测试)
2) 对接头装置与对接座装置沿轴线方向呈10°俯角。如图13所示,将对接座装置利用螺栓固定在支架上呈10°俯角,对接头装置仍水平放置。实验人员推动对接座支架缓慢移动,锥形对接头首先接触下限位杆,并且在关节球轴承和弹簧组合的作用下发生了自适应头向上偏移。随着对接座的不断移动,锥形对接头位姿不断改变,当限位杆到达了对接位置,此时电磁销动作实现锁定。实验人员松开手发现对接座后连的砝码悬停在空中,表明完成了对接。在对接完成的测试中,砝码质量为300 g,已连接的两对接装置并无出现明显松动现象,表明连接稳定,可靠。
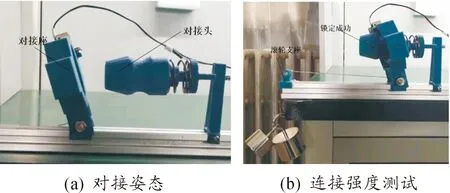
图13 10°俯角实验
3) 对接头装置与对接座装置两轴线竖直距离偏差 5 mm。如图14所示,调整对接头装置,对接座装置调节成平行于导轨平面。同实验二相同对接机构也发生了自适应动作,锥形对接头向下发生了偏移。对接锁定完成后,实验人员松开双手砝码悬在空中,表明完成了对接。在完成对接的测试中将砝码质量同样为300 g,对接装置无明显松动。

图14 竖直偏差5 mm实验
5 结论
研制成功一种柔性对接机构,具备纠偏和自适应能力,不仅可以提高对接机构的容错性,而且可以实现多个机器人的可重构性。在竖直偏差5 mm、俯仰偏差10°该对接机构可以成功完成对接。
