港口码头前沿基床冲刷检测方法分析与防护
2020-08-04史青法李富会
史青法,李富会
(天津市陆海测绘有限公司,天津 300304)
引 言
港口的生产发展与泊位码头的建设密不可分。码头是港口供轮船或渡船停泊、乘客上下、货物装卸而修建的建筑物[1]。一些企业只为了追求效益而忽略了码头本身的安全性,不注重防护,最终酿成码头因年久失修而坍塌的安全事故。因此,水下建筑物的安全对港口企业的发展生产至关重要。
冲刷是水流对海底地形的一种侵蚀过程,泥沙随着水流的移动而移动。冲刷的方式主要分为三类:自然演变冲刷、一般冲刷、局部冲刷[2]。码头前沿冲刷主要是由水流受阻而形成的水流漩涡剧烈淘涮码头根部泥沙,最终形成局部的冲刷坑。码头前沿强劲水流的形成主要有两方面原因,一是自然的潮流形成;二是货轮、拖轮离靠泊时大功率螺旋桨的搅动而形成。为了防止码头结构因冲刷而稳定性受损、结构强度降低,给港口安全生产带来隐患,研究港口码头冲刷检测具有重大意义。本文以唐山港京唐港区码头基床检测工程为例,通过多年多波束检测数据的积累说明码头基床检测、防护的必要性和迫切性。
1 检测方法分析
1.1 检测方法
水工建筑物、构筑物的检测方法多种多样,常用的主要有潜水员检测法、ROV检测法、水下激光扫描法和声波检测法等,其中声波检测法又包括单波束检测、多波束检测、侧扫声呐检测等。下面就以上检测方法的原理、优劣性以及适用性进行简单分析探讨。
1)潜水员检测法,又称人工检测,需要潜水员携带潜水设备和水下定位信标以及照明和摄像设备潜入待检测区域,对检测范围内的海底地貌情况、碍航物位置及大小、海底构筑物或建筑物的异常区域等进行定位描述和摄像取证,全过程以目测为主,检测结果相对较为切实准确。但该方法也存在一定的局限性,检测效率不高,对检测水质、水深、海况要求较高,且每次潜水时间不能太久,且不能得出检测点的绝对深度和准确位置。
2)ROV检测法,ROV又称水下机器人,可搭载多种声学检测设备以及定位设备等,可以获取水下地形地貌的情况、碍航物或可疑物的准确位置、大小等信息,并完成各种水下施工作业任务。ROV检测技术日趋成熟,对海况要求不算太高,局部作业效率高,可搭载多种作业设备。而它的局限性则是不能准确获取绝对深度,大面积作业效率低,对水的能见度要求较高。
3)水下激光扫描法,是利用水的后向散射光强相对中心轴迅速减小的原理从而获取水下点云数据的方法进行水下成像,它可搭载在 ROV上,进行水下航行扫描,目前该方法已经被应用于多种工程中,然而该方法对水质要求较高,浑浊的水体激光传播的距离会受到较大的影响,检测效率较低,仅适合小范围局部检测。
4)声波检测法是利用声波在体水中的传播对待检测物体进行检测一种方法,该方法受水体环境影响较小,作业效率和检测精度较高。单波束和多波束检测均可以获取绝对深度和准确的位置。侧扫声纳系统适合大面积的扫测,它的扫测精度相对较低,不适合用于码头测量检测。
针对不同的检测对象可选择不同的检测方法,采用先进的、科学的检测手段能够及时有效的掌握水下结构物的病害,从而提高检测效率和质量,确保构筑物的安全。对于港口码头前沿基床的检测,采用潜水员、ROV摄像检测法和水下激光检测法很显然效率和绝对精度都无法得到有效的保障,但对于声波检测法无疑是高效的,且检测质量也有足够的保证。目前,业内使用的声波检测设备主要包括多波束测量设备和三维扫描声呐设备等。在京唐港区码头前沿基床检测中使用多波束测量设备对其进行检测,其他方法不再赘述。
1.2 多波束检测误差来源
多波束测深系统主要包括测深换能器、GNSS定位仪、姿态传感器、声速仪、潮汐测量设备和其他设备[3]。由此可见,多波束测深系统是由多种传感器集成的一个复杂系统,每一个设备对检测精度都承担着非常重要的作用,所以检测数据误差来源具有多源性的特点。
1)噪音的影响误差
任何机械设备只要开机运转都会存在一定的噪音,只是控制在一定范围内而不影响结果,超出控制范围的噪音会直接干扰数据结果,多波束测深设备自身噪音(电子噪音、机械噪音、流噪音)、海洋环境噪音(潮汐、水流、海浪、其他船只、海洋生物)以及测量船船舶噪音(船舶发动机、螺旋桨)均会对检测结果造成一定的粗差,亦可称之为假信号,如图4。此外,这些假信号中也包含了由于软件参数设置不合适而引起的异常数据,这些假信号将会在后期经过人工干预或软件自动计算进行剔除。减小噪音的最实用方法就是选择远离船舶发动机并避开船底流气泡的位置安装换能器,系统自身噪音一般无法避免。
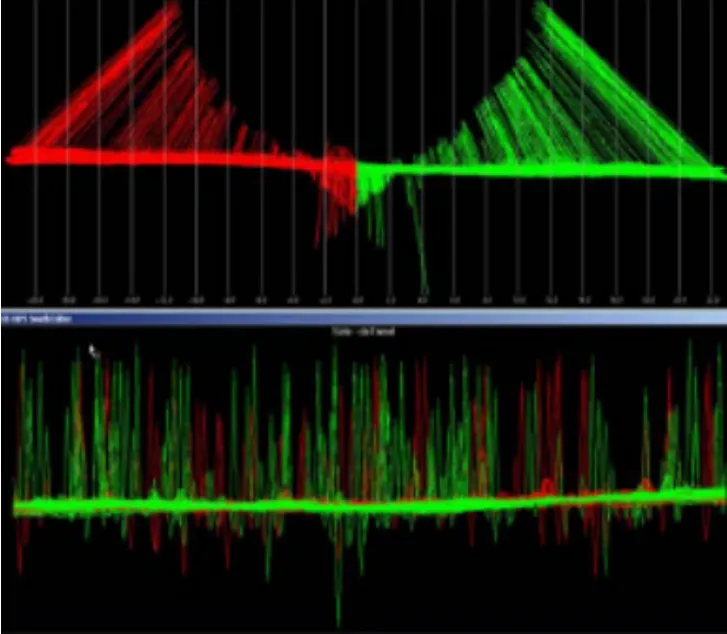
图1 噪音对测深信号的影响示例
2)设备安装校正误差
多波束测深系统结构复杂,安装时有着严格的要求。多波束的安装方式可分为船舷安装、船底安装和竖井安装。无论是哪种安装方式各传感器安装时都无法达到理论设计的要求,均会存在一定的安装偏差,如图2所示。而这些偏差直接影响着测量结果的精度,因此需要对系统进行校正以消除或减小这些偏差,主要包括 GPS 时延(Latency)、横摇(Roll)、纵摇(Pitch)和艏向(Yaw)的误差校正。
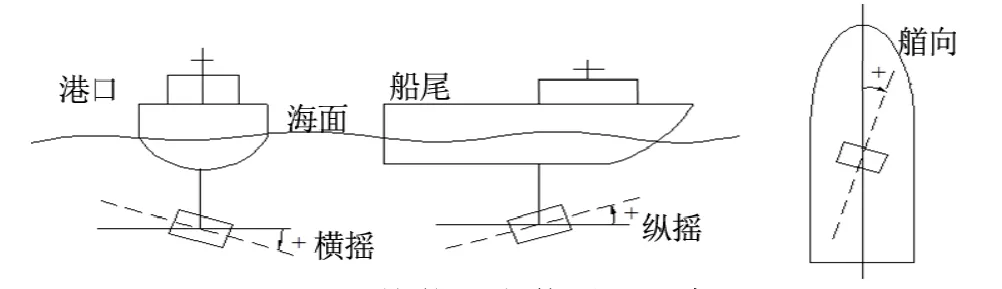
图2 换能器安装误差示意
误差校正方法:
①时延(Latency)校正,选取一海底特征物或特征地形布设一条测线,以正常测量速度往返通过特征物O,通过两次测得的特征物位置A和A′以及船速v进行时延误差t的测定,计算公式为t=L/2v。如图 3所示。

图3 时延测定示意
②横摇(Roll)误差的校正,选取约20 m的平坦海底布设一条测线,测量船按照相同速度在测线上往返行驶,测量海底面的夹角θ等于2倍的换能器横向安装偏差,根据测线同一横断面上相同位置的水深差值进行比较,计算出横摇安装偏差,计算公式为θ= arctan(△h/l)。如图4所示。
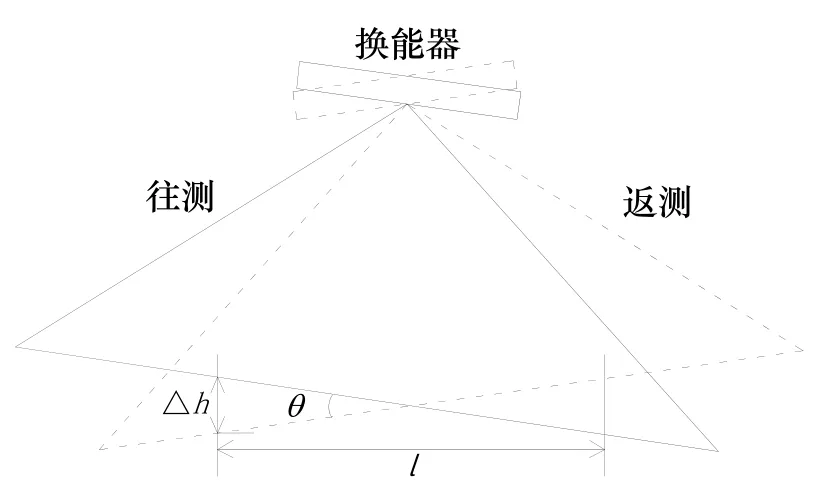
图4 横摇误差测定示意
③纵摇(Pitch)误差校正,选取一斜坡或特征物垂直等深线布设一条测线,正常测量速度往返行驶(1和2方向)获取测量数据,H表示深度,O点位斜坡的真实位置,P和P′为两次测量获取的斜坡位置,△S为 P至 P′之间的距离,纵摇偏差α的计算公式为α= arctan(△S/2H)。如图5所示。
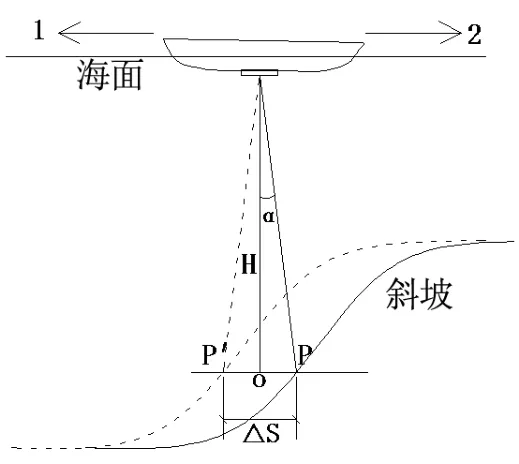
图5 纵摇偏差测定示意
④艏摇(Yaw)误差校正,选择一处海底特征物为中心在两侧各布设一条测线,同速同向(反向)进行数据获取,A、C位置均为测量获取的特征物位移位置,B点为特征物真实的位置。l为两位移位置之间测距离,d为测线宽度,艏摇偏差的计算公式为β=arctan(l/d)。

图6 艏摇误差测定示意
经过以上方法对换能器安装偏差校正完成后,部分数据由于受到外因的影响而不能很好的拟合在一起,由于系统校正引起的条带拼接误差,将直接影响检测精度,如图7所示。
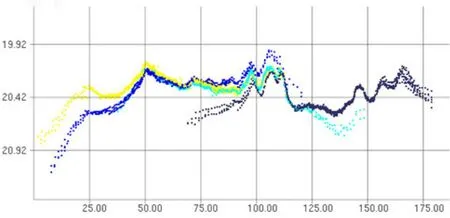
图7 校准不完善引起的条带拼接误差
3)GNSS定位误差
GNSS定位误差主要来自三个方面:①卫星部分误差;②传播途径误差;③信号接收机误差。卫星部分误差主要包含星历误差、钟误差、相位不确定误差等;传播途径误差包括电离层、对流层的干扰误差和多路径误差,如:在散货码头上均有成排的塔吊机车,在其下方测量时GNSS信号部分将被遮挡,理解为环境导致的定位误差(无塔吊机车的除外);信号接收机方面的误差包含接收机噪音误差以及其他误差,如:定位天线的竖向投影并不在船体坐标系O点位置,需要对GNSS的安装位置进行归算至O点位置,在归算过程量取偏差值时存在量取误差。
4)姿态改正误差
姿态改正误差主要体现在以下三个方面:①由于姿态本身安装不牢固,导致和测量平台的姿态变化不同步,从而测量平台得不到有效的补偿。②由于换能器的安装不牢固,或由风浪、海流的冲击影响,导致与测量平台之间产生颤动,换能器同样得不到有效的姿态补偿,且数据呈“抖动”现象。③由于1PPS的原因,导致换能器数据与姿态数据传输存在不规律的时延,从而无法使测量数据得到有效的姿态补偿,造成“蝴蝶”效应[3]。
5)声速改正误差。
声波是目前所知的最佳水下传播形式,声速测量的目的是为了对测深数据进行声速改正,确定声波在水中的传播方向和路径。声速误差直接影响多波束的测深精度影和波束点的平面位置,尤其对多波束边缘波束影响更为严重,经常导致测深条带两边向上弯曲或向下弯曲的现象。要减弱声速改正误差,就要了解测量区域的声场变化规律,测量出适当时刻、适当密度、高精度的声速剖面进行声速改正。
2 工程实例分析
2.1 测区概况
唐山港京唐港区是国家《水运“十三五”发展规划》重要港口,集绿色港口、智慧港口、多式联运港口三个交通运输部示范工程于一身。规划面积90 km2,其中陆域65 km2,海域25 km2。规划建设六个港池、五大功能区(集装箱作业区、液体散货作业区、干散货作业区、杂货作业区、综合物流区);目前,京唐港区已建成第一、二港池全部和第三、四、五港池部分泊位[4]。本文重点从三港池的26#~27#泊位和工作船泊位进行分析。港区局部如图8。

图8 京唐港局部港池
2.2 GNSS定位误差解决方案
中国沿海 RBN-DGPS差分台发出的定位信号在开阔水域进行测绘工作的定位精度完全满足规范要求。在码头基床检测作业时,采用了RBN-DGPS差分定位技术,随后发现在码头前沿测量时由于受到码头岸上集装箱塔吊机车和散货抓斗塔吊机车的遮挡影响,出现较大的定位偏差,这将对检测精度造成很大的影响,直接违背了高精度检测的初衷。为了减小因定位偏差引起的误差,检测作业时采用了高精度的GNSS惯性导航系统对定位偏差进行及时补偿,有效的解决了由塔吊机车遮挡引起的定位偏差问题,提高了定位精度。图9为检测效果比较,图9(a)采用普通的DGPS定位技术,受到GNSS信号遮挡后航迹跳变严重,定位偏差较大重复测量的码头壁时有交叉现象;图9(b)采用GNSS惯性导航系统,定位信号得到有效的补偿,重复检测时码头壁叠加效果较好。

图9 由塔吊机车遮挡引起的定位误差比较
2.3 基床冲刷比较分析
本文检测分析的冲刷码头均位于三港池内,26#~27#泊位位于南岸,设计深度15.5 m,为集装箱码头,供集装箱船舶停靠;工作船泊位位于西岸,设计深度为13.0 m,主要供大功率引水拖轮停靠。该码头均为地下连续墙结构,该结构在粘性土、沙土等软土层地下工程中应用较多,且可承受很大的土压力,很少发生坍塌事故,但也不是永固不朽。
三港池地处京唐港区内部,受海底流影响较小,不容易形成码头基床深坑。根据多年检测数据分析,码头前沿形成深坑的原因主要是由局部强劲水流冲刷而成,这种强劲水流主要来源于船舶停靠或离泊时侧推螺旋桨动力,水流受阻后形成侧竖向或竖向回旋流,码头基床常年受该水流的冲刷而形成深坑,泥沙随着水流上升并沉积于冲刷坑附近的海底面,随着冲刷坑越深则码头的安全系数逐渐降低。
自2013年至2017年间对上述两处码头前沿基床进行逐年检测,发现前沿基床已冲刷严重,且有逐年加深加宽的迹象。三港池工作船泊位自2013年建成至2015年期间冲刷最为严重,冲刷深度约达3.5 m,距码头壁10~40 m之间回淤最为严重,最大回淤高度约0.9 m,明显已不满足设计深度要求,2015年至2017年检测发现冲刷基本趋于稳定(见图10),未见扩大迹象。26#~27#泊位于2014年建成,2015年检测发现码头前沿基床深度已达17.7 m,冲刷坑深约2 m,造成基床大面积回淤接近0.5 m,主要回淤在坑上边缘约10 m之内;2016年和2017年冲刷宽度有较大增加且有逐年增大趋势,深度与2015年持平,前沿水深最前为15.2 m,也已不能满足设计深度要求(见图11)。
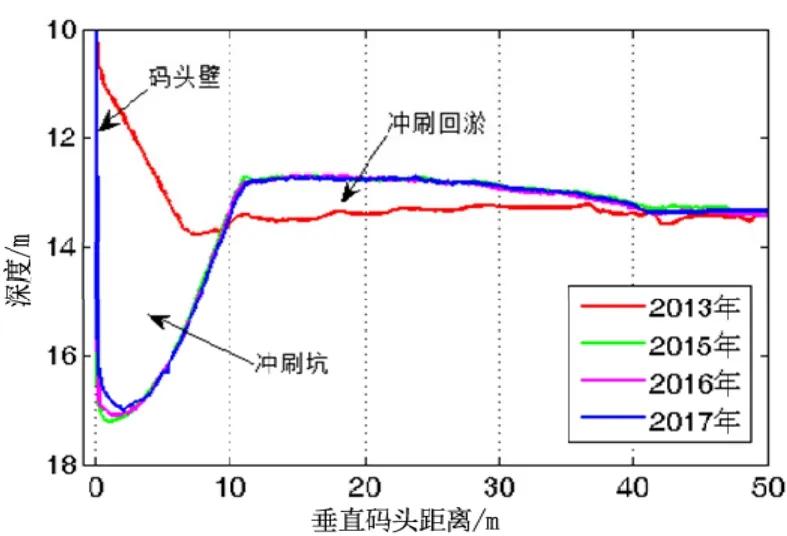
图10 工作船码头基床局部冲刷断面

图11 26#~27#码头基床局部冲刷断面
通过以上数据分析,发现基床冲刷后的深度已远远超过了泊位设计的0.5 m的超深深度。建议对这种存在冲刷现象的码头基床做必要的防护,防止情况严重恶化出现事故而影响港口建设和生产。
3 冲刷防护
冲刷防护一般分为主动防护和被动防护。主动防护是由人为行为改变水流方向及其状态,达到减弱水流冲刷的目的。被动防护是在其冲刷区域布设碎石块及混凝土连锁排等提高基床的抗侵蚀能力。这种被动防护法在很多的防护工程中已广泛应用,如海底管道防护、桥墩防护等。其特点是取材方便、成本低廉、工艺简单、操作灵活[5]。
基于码头基床现状提出以下两点防护建议,建议一:在码头基床冲刷坑内抛掷碎石,粗糙的石块可以一定程度上减缓水流的流速,降低水流带走泥沙的能力,可以有效的遏制水流对码头基床的冲刷。建议二:在码头基床冲刷坑内抛下粗砂袋,然后在其表层布设水泥连锁排,连锁排也可以有效的减缓水流冲刷力,对易被冲刷的基床起到一定的保护作用。另,注意防护层的高度不可浅于泊位的设计深度值,以防发生船舶搁浅或触底事故。
4 结 语
通过多年数据积累分析,证实了对码头前沿基床进行年度冲刷检测和防护的必要性,是对港口建设和安全生产的一种有力保障。建议对以上冲刷坑尽早进行防护处理,基于码头现状文章给出了防护建议,不满足于设计深度的区域及时采取疏浚措施,保证码头生产安全和通航安全。文章讨论的内容以及检测方法对港口码头建设以及港口安全生产具有重要意义。该检测方法亦可用于海上风电桩基、石油平台桩基、跨海桥梁桥墩、水库淤积检测等水下检测项目。