一种无刷直流电机模糊比例积分控制器的设计
2020-08-03肖宜辉宋保业
肖宜辉, 宋保业, 许 琳
(山东科技大学电气与自动化工程学院,青岛 266590)
无刷直流电机是现代电子技术和现代控制理论融合的产物,它是伴随着半导体技术出现的一种机电一体化产品。由于其调速性好、功率密度高、可靠性好且易于控制而备受关注[1-2]。但是,其转速调节精度不高的问题,使其在一些精度要求较高场合下的应用受到限制。
模糊控制是建立在人工经验规则和隶属度基础上的自适应控制方法[3]。可以在未建立被控制对象精确数学模型情况下,基于专家经验对非线性对象进行控制[4]。其具有较强的鲁棒性,被控制对象参数变化对系统影响较小,因此在无刷直流电机控制系统中得到了广泛应用。例如,文献[5]设计了一种模糊比例积分(PI)控制器,使用模糊控制器调节PI控制器参数,从而实现无刷直流电机转速的实时控制,但其PI控制器初始参数仍需要人工调试。文献[6-7]设计了模糊自适应比例-积分-微分(PID)控制器,使用模糊控制器对PID中3个参数进行自整定,能够实现无刷直流电机转速的平稳快速响应,但模糊控制器论域无法调节,使其在小误差时的参数调节存在粗糙性。文献[8]设计了一种结合PID控制器和PID自整定模糊逻辑控制器的混合控制器对无刷直流电机进行控制,可以结合两种控制器的优点有效提升控制器性能,但实现方法较为复杂。文献[9]设计了一种变论域模糊参数自适应PID控制无刷直流电机,具有良好的静态性能,但其校正因子一直在累积变化,电机转速波动不能满足高精度控制。
近些年来,出现了许多启发式智能优化算法。如,粒子群算法(PSO)、引力算法(GSA),遗传算法(GA)和蚁群算法(ACO)等[10],并用于控制器设计和优化。如文献[11]提出了一种改变量化因子的方法来优化模糊PID控制器,该控制器有较大的动态调整范围,但其量化因子取值需要人工对比调试,无法快速找到合适的量化因子。文献[12]采用了PSO算法来寻优模糊控制器的量化因子,进一步提高了控制器的鲁棒性和稳定性,但因其算法探索能力不足而容易陷入局部极小点。文献[13]提出了一种基于改进遗传算法的模糊PID控制器,对于无刷直流电机能够缩短阶跃响应时间,降低控制误差,但其只对PID控制器的初始参数进行寻优,无刷直流电机控制的稳定性还有待提高。
针对这些问题,提出一种基于PSO-GSA算法的无刷直流电机模糊PI控制器设计方法。首先,建立了无刷直流电机控制系统的数学模型。然后,提出一种结合PSO和GSA的PSO-GSA智能优化算法。PSO-GSA算法融合了PSO算法的全局开发性能和GSA算法的局部探索性能,具有更加优异的最优值搜索能力。进一步,将PSO-GSA算法用于模糊PI控制器的量化因子和比例因子的优化,能够得到性能更加优越的模糊PI控制器。最后,通过仿真实验验证基于PSO-GSA算法的无刷直流电机模糊PI控制器设计方法的有效性和优越性。
1 无刷直流电机控制系统的数学模型
无刷直流电机控制系统模型如图1所示,假定定子绕组各相参数相同,且绕组自感、互感为常数,则无刷直流电机的电压的平衡方程为[1]

图1 无刷直流电机控制系统模型Fig.1 Model of brushless direct current motor control system
(1)
式(1)中:Ux(x=A、B、C)为定子三相绕组电压,V;ix(x=A、B、C)为定子三相绕组电流,A;ex(x=A、B、C)为定子三相绕组电动势,V;R为每相绕组的电阻,Ω;L为每相绕组的自感,H;M为每两相绕组间的互感,H;n为参考电位点。为了简化计算,式(1)中的L-M统一用LM来表示,则电机等效电路的电压平衡方程可以改写为
(2)
2 PSO-GSA算法
2.1 粒子群算法
粒子群(particle swarm optimization,PSO)算法由社会学家James Kennedy提出,该算法的思想来源于鸟类的觅食活动规律[14]。它使用大量的粒子在搜索空间中随机自由运动,并在达到终止条件或在迭代规定次数后输出当前的最优值。其中,粒子速度和位置的计算公式如下:
vi(t+1)=wvi(t)+c1rand[pbest,i-xi(t)]+
c2rand[gbest-xi(t)]
(3)
xi(t+1)=xi(t)+vi(t+1)
(4)
式中:vi为第i个粒子速度;w表示惯性权重,主要用来继承之前运动速度,平衡算法的全局搜索和局部探索能力;pbest,i是第i个粒子在第t次迭代的最好位置;gbest则是粒子群体目前为止最好的位置;rand为[0,1]之间的随机数;c1、c2是学习因子,是控制自我历史经验和群体最优个体学习的因子;xi(t)是第i个粒子在t时刻的位置。
粒子群算法搜索速度快,拥有较强的全局开发能力,且群体的历史最好位置可以记忆并传递给其他粒子,但是寻优不精确,缺乏局部探索能力。
2.2 引力算法
引力算法(gravitational search algorithm,GSA)是使用一群粒子在万有引力定律作用下不停地运动更新来寻找最优解的智能算法[10]。通过在迭代中更新粒子受到的合力、加速度、引力常数来计算粒子的速度和位置,基于万有引力定律,各个粒子会向个体大的粒子移动并最终停留在其周围,从而找到最优解。
为了保持GSA算法的收敛速度,重力常数G在开始时由一个初始化值G0并且必须随着时间逐渐减少而保持收敛,算法更新方程为
(5)
式(5)中:t为迭代次数,tmax为最大迭代次数,α则为减小函数的系数。
各个粒子的加速度、速度和位置根据式(6)、式(7)进行更新:
vi(t+1)=randivi(t)+aci(t)
(6)
xi(t+1)=xi(t)+vi(t+1)
(7)
式中:vi是粒子的在t次迭代的速度;aci是粒子在迭代t次加速度;xi是粒子在t时刻的位置。
然而,在GSA算法中粒子的运动方向取决于周围粒子所产生的引力,粒子的质量越大产生的引力越大,重的粒子会将周围较轻的粒子吸引到其周围,因此全局探索范围有限,并且该算法没有记忆因子不能储存之前产生的最优解。
2.3 PSO-GSA融合算法
PSO-GSA算法结合了两种算法的优势,将PSO算法中的全局开发能力和GSA的局部探索能力相结合能够更好地跳出局部最优解,且收敛速度比标准GSA算法和PSO算法快。同时弥补了GSA算法迭代过程中缺乏的记忆性和信息交换能力,显著提高了算法性能。其粒子运动更新方程为
vi(t+1)=wvi(t)+r1randaci(t)+
r2rand[gbest-xi(t)]
(8)
式(8)中:rj是加速度常数;w是惯性权重函数;当学习因子w=0时,基本粒子群算法失去对粒子本身的速度记忆;r2=0时为自我认知性粒子群算法,完全没有信息的社会共享,导致算法收敛缓慢;当r1=0时,为无私型粒子群算法,只有社会没有自我,迅速丧失群体多样性,易陷入局优而无法跳出。在每一次迭代中更新粒子位置方程为
xi(t+1)=xi(t)+vi(t+1)
(9)
PSO-GSA算法流程如图2所示。首先随机初始化所有粒子,每个粒子都被视为一个候选最优解。初始化后,分别评估各个粒子的适应度,开始根据粒子迭代次数更新引力常数和更新到目前为止最好的解。然后根据以上参数计算出粒子所受的合力以及加速度,并通过式(8)计算出所有粒子的速度,最后将粒子的位置定义为式(9),更新速度和位置满足标准后将结束,若不满足条件则重复以上过程直至达到最大迭代次数输出当前最优解。

图2 PSO-GSA算法流程图Fig.2 Flow chart of PSO-GSA algorithm
为测试算法性能,选择使用文献[15]中四个测试函数对三个算法的性能进行对比,测试函数的表达式如式(10)~式(13)所示。其中式(10)的维数是30,上下限为[-100, 100];式(11)的维数是4,上下限是[0, 10];式(12)的维数是4,上下限为[-5, 5];式(13)的维数是3,上下限为[1, 3]。四个例子的适应度函数值如图3所示。通过四个测试函数的对比验证,PSO-GSA算法比PSO算法和GSA算法收敛速度更快,适应度函数值更小,性能更好。
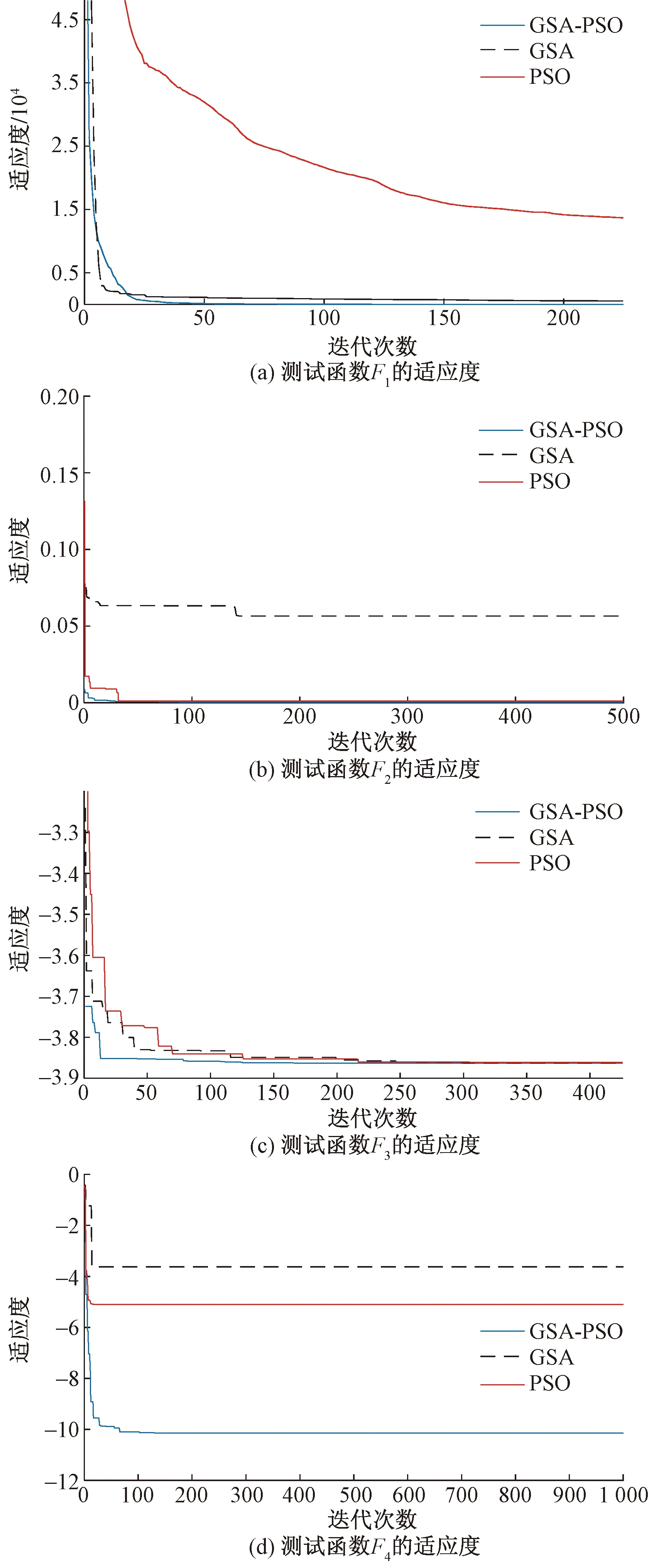
图3 测试函数的适应度Fig.3 Fitness of test functions
(10)
(11)
(12)
(13)
3 模糊PI控制器设计
3.1 模糊PI控制器
模糊自适应PI控制器的思想是针对模糊控制器根据系统误差e和误差变化率ec的大小进行模糊化,通过模糊规则确定ΔKp、ΔKi的变化程度再使用反模糊化输出ΔKp、ΔKi,从而调节PI控制器参数来快速达到稳定的预期值。模糊PI控制器的结构框图如图4所示。
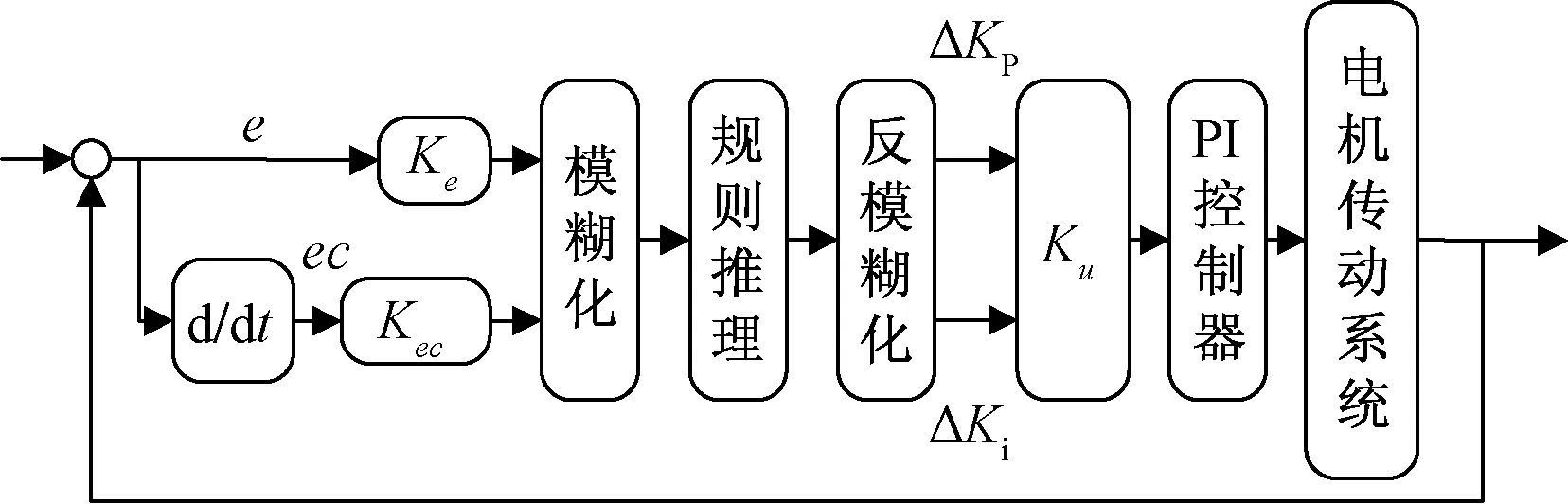
图4 PI控制器结构框图Fig.4 Block diagram of PI controller
Ke、Kec分别是误差和误差变化率的量化因子,Ku是输出ΔKp、ΔKi的比例因子。模糊控制器中的e、ec使用的是钟形隶属函数如图5所示,ΔKp、ΔKi使用的是三角形隶属函数如图6所示。

图5 e和ec的隶属度函数Fig.5 Membership function of e and ec
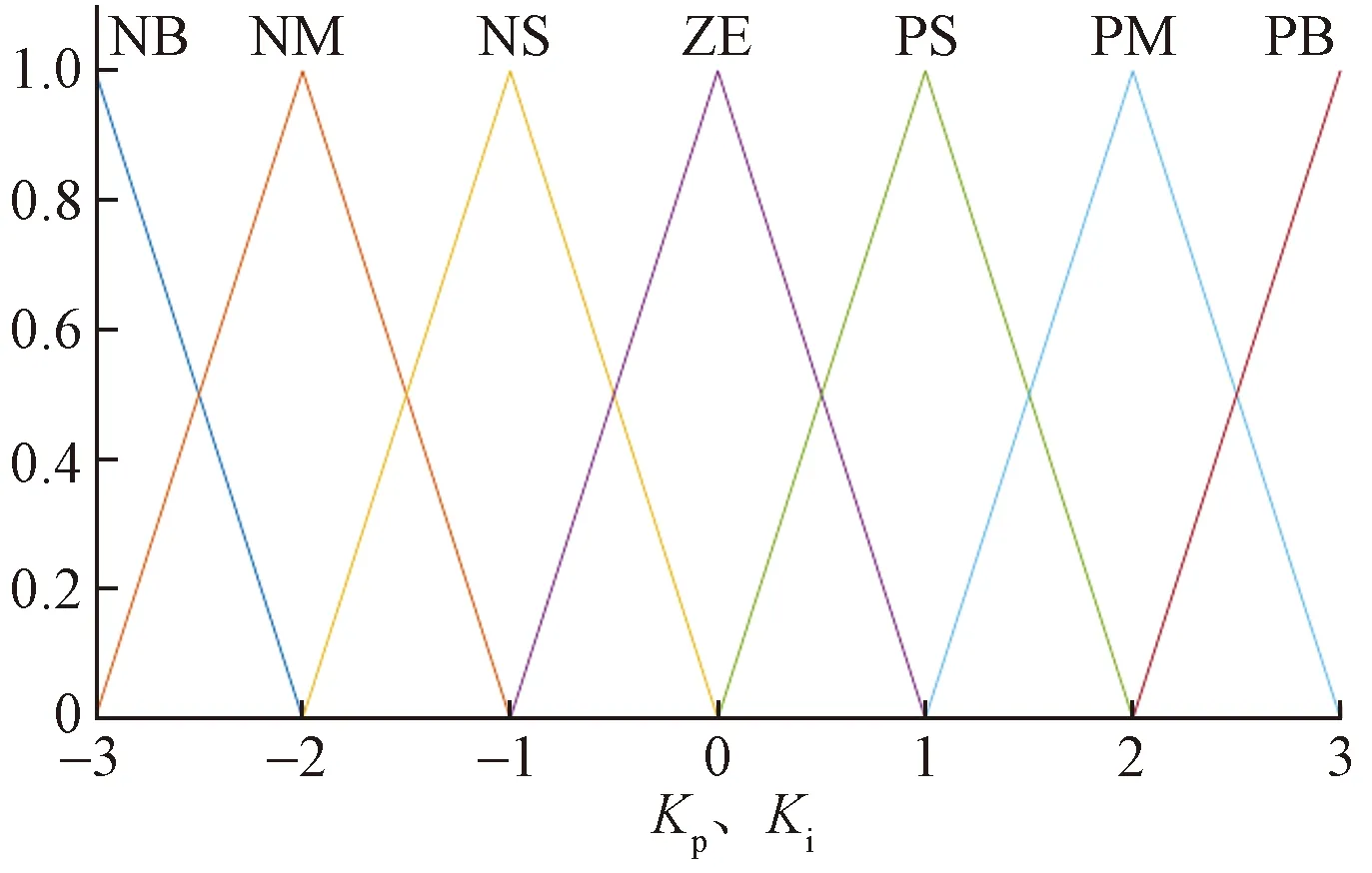
图6 ΔKp和ΔKi的隶属度函数Fig.6 Membership function of ΔKp andΔKi
确定好输入输出的隶属度函数之后,开始编写模糊控制规则工作,其中模糊规则取7个语言变量:{负大,负中,负小,零,正小,正中,正大}[16],输入输出变量的模糊子集均为{NB,NM,MS,ZO,PS,PM,PB},论域均为{-3,3}。模糊控制规则由一系列的条件连接词组成,使用最频繁的条件语句是if_then语句,经过大量电机实验积累得到模糊控制规则模糊规则,总共49条。图7、图8分别为ΔKp、ΔKi输入模糊规则后获得模糊控制面,不同颜色用于区分不同e、ec对应不同ΔKp、ΔKi的值。
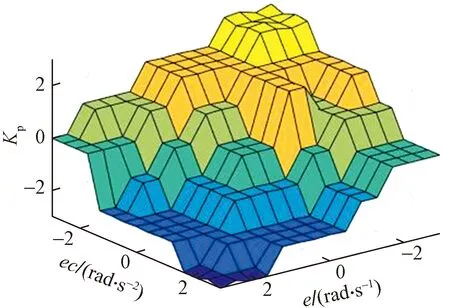
图7 ΔKp的输出空间曲面Fig.7 Output space surface of ΔKp

图8 ΔKi的输出空间曲面Fig.8 Output space surface of ΔKi
3.2 基于PSO-GSA的模糊控制器优化
这里使用的模糊PI控制器是二维模糊控制器,其数学模型为
(14)
式(14)中:非线性函数f是模糊控制器内部的运算;量化因子Ke和Kec分别为模糊控制器输入误差的比例量和微分量的系数;Ku则为输出变量的放大系数。由于模糊控制器的敏感度对于控制器性能有很大影响,所以合适的量化因子和比例因子可以使其有更好的自适应能力[17]。
图9为使用PSO-GSA算法寻优量化因子和比例因子的系统框图。通过调节量化因子和比例因子的大小来控制输出的ΔKp、ΔKi,从而调节PI控制器的参数使模糊PI控制器有更好的稳定性和鲁棒性。根据无刷直流电机的控制性能要求选用的积分性能指标为

图9 模糊控制器优化Fig.9 Optimization of fuzzy controller
(15)
3.3 仿真与实验分析
将上面所讨论的自适应模糊控制算法设计的自适应模糊控制器应用到无刷直流电机调速系统控制中,代替传统的 PI 速度调节器。仿真时采用实际无刷直流电机参数,即:定子相绕组电阻R=0.9 Ω,定子相绕组自感L=0.25 mH,转动惯量J=0.008 kg·m,给定转速为1 000 r/min,极对数p=4,使用500 V直流电源供电,电机为带载启动,起始转矩为3 N,在启动0.05 s后施加2 N的突变负载。基于MATLAB/Simulink建立了无刷直流电机控制系统的仿真模型,对BLDCM 调速系统分别采用自适应模糊控制和传统 PI 控制,通过仿真比较PI控制器、模糊PI控制器和PSO-GSA算法优化过的模糊PI控制器,测试两者抗负载突变的能力优劣。其中图10为三种控制器负载启动后转速调节的比较,图11是负载启动后负载突变的转速变化曲线。

图10 三种控制器转速比较Fig.10 Speed comparison of three controllers

图11 三种控制器转速在突变负载情况下比较Fig.11 Speed comparison of three controllers under the condition of abrupt loading
仿真结果对比可知,在给定转速1 000 r/min时,传统PI控制器和模糊自适应PI控制器要比经过PSO-GSA算法优化后的模糊自适应PI控制器精度低、响应慢,并且抗扰能力弱。
在此仿真模型的基础上,又进行了相应的半实物仿真实验研究,实验系统硬件组成如图12所示。将检测到的电机实际转速通过串口输送到仿真模型中,经过模型的运行计算得到输出控制量传送给单片机,接着单片机将控制量转换为PWM信号,通过PWM换向调压来控制转速使电机保持运行状态。

图12 电机实验系统硬件Fig.12 Hardware of the motor experiment system
实验中用到的电机额定电压12 V、额定电流0.55 A、极对数为4、最大空载转速为9 550 r/min、空载电流0.15 A。优化前后的PI控制器对该电机转速控制跟踪曲线如图13所示。显然,经过实验验证经过优化的模糊PI控制器性能有显著提高。

图13 优化前后PI控制器转速响应Fig.13 Speed response of PI controller before and after optimized
4 结论
针对传统的电机控制器调速慢,精确度低,稳定性差等问题,提出了一种基于PSO-GSA算法优化模糊自适应PI控制器的量化因子和比例因子来实现对无刷直流电机转速的精确控制。该算法既有PSO中的全局开发能力,又有GSA的局部探索能力。通过仿真和实验验证了使用该算法优化的模糊自适应PI控制器对无刷直流电机控制有着很强的自适应能力和抗负载扰动能力。这一新颖的控制方法为运动控制领域中复合智能算法控制策略的研究与发展提供了新的思路。
