一种仿尺蠖式输电线路巡检机器人越障运动分析
2020-08-03王吉岱梁茂轩孙爱芹王智伟
王吉岱, 梁茂轩, 孙爱芹* , 王智伟, 刘 毅, 张 斌
(1.山东科技大学机械电子工程学院,青岛 266590;2.国电南瑞科技股份有限公司,南京 211000)
输电线路巡检机器人是一种代替人工进行输电线路巡检作业的电力作业机器人,其中机器人手臂作业空间小、无法跨越引流线等复杂障碍、越障可靠性能差等因素一直是限制其推广应用的技术难点。
输电线路巡检机器人一直是中外电力机器人领域研究的热点,早在20世纪90年代初,发达国家就对其进行了研制,其中代表性的有加拿大魁北克水电研究院研究的“LineScout”机器人[1-2]及日本HiBot公司研制的“OPGW”机器人[3]等。20世纪90年代末,中国一些研究机构及高校也展开了相关研究工作并取得了突出进展,其中最具代表性的有武汉大学团队研制的双臂式巡检机器人[4-5]、山东科技大学团队研制的仿猿式三臂巡检机器人[6]及中国科学院自动化研究所研制的多臂式巡检机器人[7-8]等。总体来看,目前中外研究机构所研制的巡检机器人基本均可以实现简单障碍(间隔棒、防振锤等)的稳定跨越,但大多还不能实现引流线等复杂障碍的跨越。山东科技大学所研制的仿猿式巡检机器人[9]虽然可以基本完成引流线障碍的跨越,但中臂作为重心平衡臂,并不能实时调节机器人重心位置,在风力或重力的干扰下,易出现机器人前后倾覆及打滑下坠的现象,越障稳定性较差。
针对上述问题,设计一种能稳定跨越引流线等复杂障碍的巡检机器人。通过观察与分析尺蠖运动特点,结合仿生学理论对机器人结构进行设计。运用运动学知识及ADAMS软件对机器人越障运动进行仿真与分析,并进行实验验证机器人结构设计的合理性及机器人越障过程的稳定可靠性。
1 机器人仿尺蠖式结构设计
1.1 尺蠖运动分析
尺蠖属于无脊椎动物,运动方式为屈伸蠕动[10],其运动过程中,胸足和腹足、臀足分别起着保持器的作用,这三种足在不同阶段控制着尺蠖的身体与固定物保持着不同的关系,尺蠖的身体部分则起着推进器的作用。把尺蠖一个运动周期内的运动分解,如图1所示,可以得到以下运动规律:①胸足、腹足和臀足均抓紧固定物,躯干处于舒张状态并静止;②胸足抓附固定物,腹足和臀足脱离固定物,躯干收缩,胸足和臀足跟随躯干的收缩移动,腹足和臀足贴近胸足后,腹足和臀足再次抓附固定物;③胸足脱离固定物,躯干舒张并伸长,当胸足越过障碍物并找到合适的位置后,胸足再次抓附固定物;④腹足和臀足脱离固定物,躯干收缩并越过障碍物,腹足和臀足跟随越过障碍物,贴近胸足后再次抓附固定物。尺蠖的一个屈伸动作,可使身体移动距离h,h与腹足和胸足间的距离有关。尺蠖蠕动式运动稳定可靠,躯干的舒张动作使尺蠖具有较大的空间越障能力,可以完成空间中较大障碍的跨越。
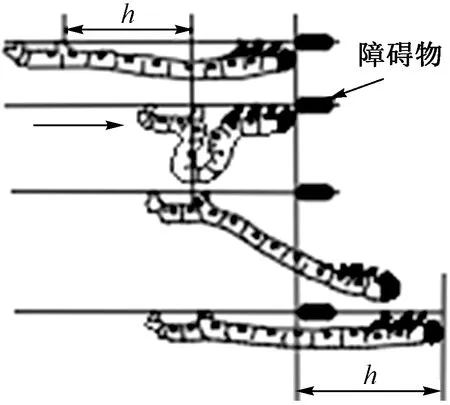
图1 尺蠖运动示意图Fig.1 Schematic diagram of inchworm motion
1.2 机器人本体结构设计
通过分析尺蠖运动机理,结合巡检作业环境,运用仿生学理论,设计输电线路巡检机器人本体结构如图2所示。前行走臂、中臂及后行走臂分别模仿尺蠖的胸足、臀足及腹足;中臂具有伸缩机构及滑移机构,末端为手爪结构,通过中臂沿导轨方向的前后滑移动作模仿尺蠖的屈伸蠕动动作;箱体具有滑移结构,可沿导轨方向前后滑移,实现机器人重心平衡调节。前、后行走臂对称布置在导轨两端,其结构组成均由大臂及小臂组成,小臂、大臂与导轨机架构成三角形结构,更具稳定性,可承受较大的刚性冲击。大臂可完成伸缩动作及绕O点的外摆动作,其中大臂的外摆动作通过小臂的伸缩动作实现,小臂伸缩量ΔL与手臂外摆角度θ满足关系式:

图2 机器人本体结构图Fig.2 Robot body structure diagram

(1)
式(1)中:LAB、LOA、LOB分别表示点A与B、O与A、O与B之间的距离。行走臂末端为行走轮机构,可完成机器人行驶动作及行走轮开合动作。行走轮下部为中空腔体结构,机器人在低速状态下,可直接穿越防振锤障碍。
除防振锤障碍外,针对线路上其他障碍,机器人均需以尺蠖式(蠕动式)运动方式完成两行走臂的交替越障,机器人前行走臂越障动作序列如图3所示。①机器人停止在障碍前方,中臂滑移至导轨前端后伸出抓取线路,如图3(a)所示,此时中臂的滑移动作相当于尺蠖的躯干收缩动作,机器人在中臂、后行走臂及箱体的作用下保持平衡;②前行走臂脱离线路并探寻障碍物另一侧合适的抓附点,如图3(b)所示,此时中臂底部的滑移机构与后行走轮相当于尺蠖身体中部的躯干部分,起推进作用;③在推进作用下巡检机器人前行走臂向前移动h距离,待前行走臂越过障碍物并找到合适的抓附位置A3后重新抓附线路,如图3(c)所示,后行走臂越障序列与前行走臂越障序列类似。

图3 机器人蠕动式越障运动Fig.3 Robot peristaltic obstacle-crossing movement
通过分析机器人蠕动式运动序列可以发现,在机器人前臂不外摆的情况下,机器人单次运动距离最大为从A1位置到A3位置,即中臂相对机器人本体的位置从C1到C2,即A1A3=C1C2=h,h和巡检机器人前后行走臂之间的距离有关,h的大小决定着机器人在手臂不外摆的情况下,机器人可通过的最大障碍尺寸。
2 机器人蠕动式越障运动学分析
2.1 机器人蠕动式越障过程正运动学分析
机器人越障过程中,主要运动为越障臂(正在越障的行走臂)和中臂的配合动作,与另一个行走臂约束关系较小,故可将机器人越障模型简化为越障臂和中臂。行走轮开合动作不影响机器人位姿及越障臂末端位置,故忽略行走轮开合运动。将越障臂小臂的伸缩运动等效为越障臂的外摆运动,以中臂手爪抓握线路部位为基坐标系原点(O0)建立机器人连杆D-H坐标系如图4所示,由齐次坐标变换法[11]知相邻两连杆之间满足关系式:

图4 机器人连杆坐标系Fig.4 Robot connecting rod coordinate system
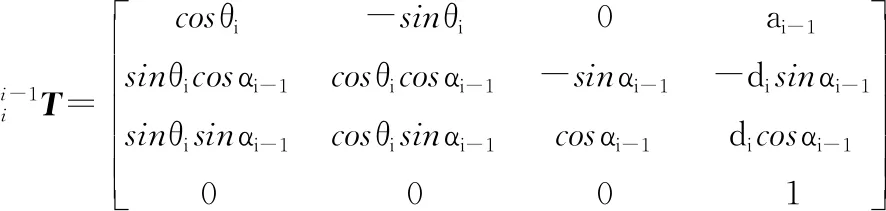
(2)
通过分析线路上障碍尺寸及分布情况,设计机器人各连杆参数如表1所示,机器人蠕动式越障初始状态下,d1=-548mm;d2=250mm;θ3=-90°;d4=548mm。

表1 机器人连杆参数表
(3)

(4)

(5)

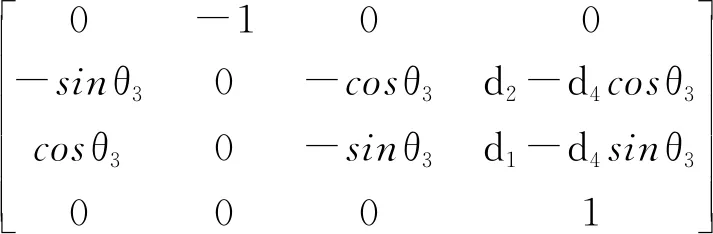
(7)
式(7)中:u、v、w、p是越障臂末端在基坐标系中的期望位置与姿态。从式(7)可知,机器人越障臂末端位置与机器人位姿由转角θ3及各关节伸缩量相关。
2.2 机器人蠕动式越障过程逆运动学分析
若已知越障臂末端目标位置,可依据机器人逆运动学法对机器人各个关节运动变量进行解算,从而为机器人越障动作进行合理的规划,实现机器人线路障碍的跨越。机器人各关节运动变量解算过程如下:
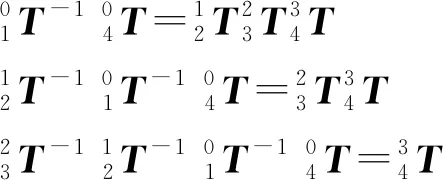
(8)
对应两边元素可得:

(9)
从式(9)可以发现,越障臂末端在基坐标系Z轴方向的位置由中臂的伸缩、越障臂的伸缩及外摆实现。越障臂末端在基坐标系Y轴方向的位置由中臂的滑移、越障臂的伸缩及外摆实现。一般情况下,机器人存在多组运动学逆解,甚至无穷多组逆解,无法解算出机器人各关节变量值,故在机器人与障碍物不发生碰撞的前提下,对机器人运动学逆解做出如下约束:①在越障臂末端能到达目标位置的前提下,关节运动数量最少时,解最优;②在关节运动数量相等情况下,以中臂滑移量最小及中臂伸缩量最小时,解最优。经上述约束后,机器人运动学逆解有唯一最优解。
忽略线路柔性变形,中臂伸出抓握线路,取抓握位置为O,依据机器人各关节运动参数绘制出越障臂作业空间如图5中ABCDEFG组成的多边形所示,从图5中可以看出,越障臂在线路上部及下部均具有较大的作业空间,特别是中臂滑移动作,大大扩展了越障臂的作业空间范围。越障臂作业空间范围大于线路上各种金具障碍尺寸,具备跨越引流线等复杂障碍的前提条件。添加逆运动学解约束后,不同作业空间区域内机器人关节动作情况如表2所示。若已知越障臂末端目标位置,将其对应至相应越障臂作业空间区域,即可解算出机器人各关节运动变量,依据各关节运动变量对机器人运动进行控制。

表2 机器人关节动作分布情况表

图5 越障臂作业空间Fig.5 Working space for obstacle-crossing arm
3 机器人蠕动式越障过程仿真分析
结合机器人运动学分析结果,运用ADAMS软件对机器人从引流线跨越至输电线路的过程进行仿真分析,机器人跨越引流线障碍过程仿真如图6所示。

图6 机器人跨越引流线过程仿真Fig.6 Simulation of the process of the robot crossing the drainage line
机器人位于引流线最低点时,各关节处于初始状态,机器人在前后行走轮的驱动下前进,如图6(a)所示;机器人攀爬至合适位置后,机器人停止行走,中臂滑移至导轨前端,同时箱体在重心调节电机的作用下滑移至导轨后端,中臂伸出抓取线路,如图6(b)所示;待中臂抓紧线路后,机器人前行走臂伸出脱离线路,前行走轮打开,由机器人运动学分析结果得,前行走臂跨越引流线过程中,仅需大臂外摆一定角度即可伸出抓取输电线路,如图6(c)所示;待前行走轮准确挂线后,中臂打开脱离线路,此时,机器人处于前后行走臂挂线状态,机器人前进,待机器人攀爬至后臂行走轮接近输电线路和引流线交汇处时停止行走,如图6(d)所示;机器人中臂伸出抓紧线路,开始进行后行走臂引流线障碍的跨越,后行走臂伸出脱离线路后,在前行走轮及中臂滑移电机的作用下向前移动,如图6(e)、图6(f)所示;当后行走臂越过引流线障碍到达合适位置后,后行走臂伸出抓取线路,如图6(g)所示;待后行走臂准确挂线后,机器人恢复至初始姿态,如图6(h)所示,至此,机器人跨越引流线障碍运动完成。
通过越障仿真过程可以发现,机器人以蠕动的运动方式可以完成引流线障碍跨越。越障过程中机器人始终至少有两条手臂处于挂线状态,保证了机器人的安全性能。由前行走轮竖直方向上重心变化曲线可以发现,越障手臂脱离线路后,没有在竖直方向上出现大幅度的沉降,说明箱体起到了很好的重心平衡作用,验证了机器人重心调节的有效性,前行走轮重心变化曲线如图7所示。

图7 前行走轮重心变化曲线Fig.7 Variation curve of center of gravity of front walking wheel
4 实验与验证
对机器人越障运动进行仿真分析后,进行物理样机的制作,并将样机置于模拟线路进行实验,模拟线路中各金具障碍参数与实际线路金具障碍参数相同。
(1)为测试机器人爬坡性能是否满足越障要求,将样机置于模拟线路上引流线段进行实验,如图8所示。通过改变引流线段的垂度来实现线路的不同坡度,观察机器人在不同坡度线路下的行走状况。实验结果表明:线路坡度在40°内机器人不会发生打滑现象,机器人满足爬坡性能要求。

图8 机器人爬坡示意图Fig.8 Schematic diagram of robot climbing
(2)为验证机器人结构设计的合理性及越障过程的稳定性,将样机置于模拟线路进行防振锤、间隔棒、悬垂线夹及引流线等障碍跨越实验。机器人跨越引流线障碍实验如图9所示,机器人实际越障过程中关节动作与仿真实验越障过程中关节动作基本一致,越障过程耗时约2.4 min。越障过程中,机器人在箱体重心自适应调节的作用下,重心波动较为平稳,没有发生前后倾覆现象;机器人在中臂手爪的抓握作用下,在受到风力载荷等外界扰动时没有发生打滑下坠现象,验证了机器人具有很好的重心平衡能力与稳定越障能力。
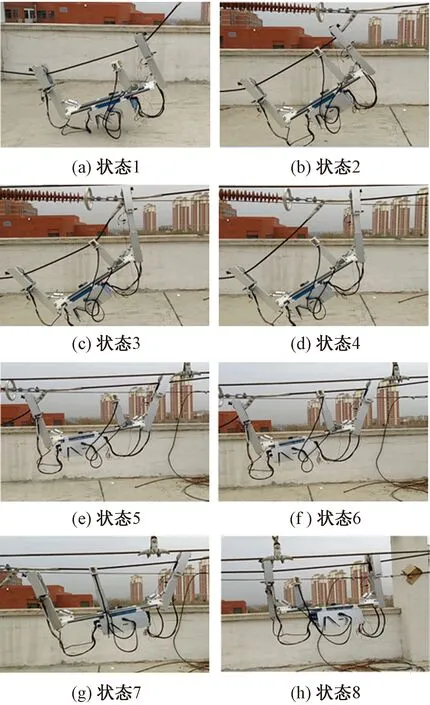
图9 机器人跨越引流线实验Fig.9 Experiment of robot crossing drainage line
多次实验后,将机器人目标参数与机器人实际功能参数进行对比,对比结果如表3所示。对比表3中数据可得机器人具有较强的爬坡能力与负载能力,越障效率较高,机器人各实际功能参数满足目标设计要求。
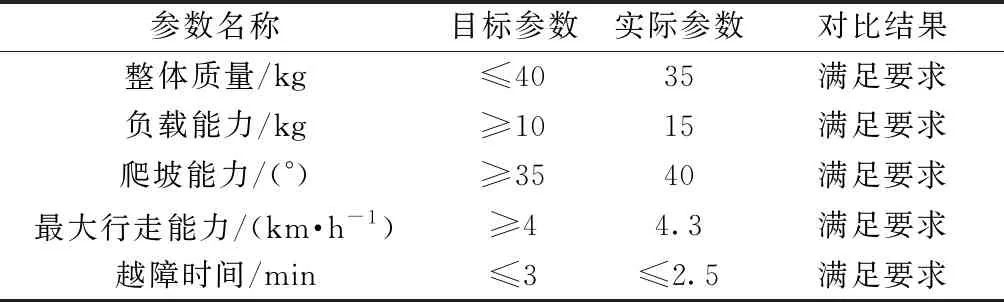
表3 机器人目标参数与实际功能参数对比表
5 结论
针对目前输电线路巡检机器人作业空间小、不能稳定跨越引流线等复杂障碍的问题,通过分析尺蠖运动特点,研制了一款新型的仿尺蠖式巡检机器人,对其越障运动过程进行仿真与实验得出以下结论。
(1)通过中臂的前后滑移动作模仿尺蠖的屈伸蠕动动作,扩展了越障行走臂的作业空间,机器人可以实现引流线等复杂障碍的跨越。
(2)蠕动式越障运动过程中,在中臂手爪抓握及箱体重心自适应调节的作用下,机器人重心起伏波动较为平稳,越障过程稳定可靠。
(3)以蠕动式运动方式,机器人可以实现线路上多种类型障碍的稳定跨越,为输电线路巡检机器人研发提供了一种新的思路。
