智轨电车列车网络控制系统设计与应用
2020-08-03李一叶粟爱军程玉溪沈梦玉邹智荣唐鹏辉
李一叶,粟爱军,程玉溪,沈梦玉,邹智荣,唐鹏辉
(中车株洲电力机车研究所有限公司,湖南 株洲 412001)
0 引言
列车网络控制管理系统(train control and management system,TCMS)是城市轨道交通车辆的“大脑”与“神经”,其最重要的功能是实现对车辆的特性控制、逻辑控制、故障监视和自我诊断,并将信息传送到司机操纵台,通过显示屏给司机以直观的、反映机车实时状态的信息[1]。根据现场实际应用环境,TCMS系统需具备安全、可靠、灵活等特性。
目前已经运营的城市轨道交通列车多采用传统的铰接式列车总线(wire train bus,WTB)和多功能车辆总线(multifunction vehicle bus,MVB)两级总线方式实现列车级/车厢级的控制数据交互,对某些特殊设备(如轴温检测装置)还采用了控制器局域网络(controller area network, CAN)或RS485总线进行信息采集和传输。RS485总线与CAN总线在远距离跨车通信方面具有较大劣势,通信质量会随着距离的增加而降低,无法同时满足通信速率与通信质量的要求[2]。同时,随着城市轨道列车智能化、信息化水平的提升,即使采用通信速率为1.5 Mb/s的MVB总线,也难以满足日益增长的设备与带宽性能需求。在此背景下,采用以太网作为列车网络传输制式成为动车组、地铁及有轨电车新的选择;而智轨电车作为跨界创新的城市轨道交通产品,选用以太网作为整车通信骨干网络成为必然。
智轨电车利用实时以太网技术组建列车及车辆级网络,并保留CAN总线以满足部分设备的通信需求。本文概述了智轨电车网络控制系统组成及其功能特性,并对其未来技术趋势进行了展望。
1 智轨电车TCMS系统需求
智轨电车为多编组列车,分布在不同车厢、不同位置的设备间进行信息交互时需跨车厢通信,且通信距离较长。多系统的信息传输与功能实现不仅需要较大的带宽,而且还对网络系统的传输时延等指标提出了较高要求。比如:乘客信息服务系统需要较大的带宽来满足系统功能;车辆环视系统需要足够的带宽来传输环视视频流;而其他各系统,如车载信号系统、制动系统、牵引系统、空调系统、辅助驾驶系统及无轨导向系统等,都需要在系统运行过程中与其他系统发生大量的数据交互,并且对交互数据的传输稳定性和数据质量均有较高要求。同时,为保证系统的可靠性,对网络系统的设计还应保留一定程度的冗余。
智轨电车网络控制系统关联关系示意如图1所示。车辆系统涵盖牵引、制动、辅助电源、无轨导向、辅助驾驶、车载信号、车载储能、空调、综合无线及乘客信息等子系统,各子系统在列车网络中完成信息交互;在网络控制系统的介入下,车载储能、牵引及制动系统完成列车的牵引制动功能,辅助驾驶与无轨导向系统完成车辆的横向控制及轨迹跟随功能,最终由车辆网络控制系统完成列车的状态监控及安全保护。
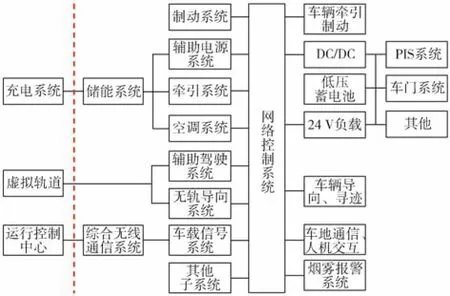
图1 车辆网络控制系统关联关系Fig. 1 Train network control system association diagram
2 智轨电车TCMS系统设计要点
2.1 通信方式及协议选择
类比于WTB/MVB双层分级式网络结构,智轨电车设置有ETB/ECN双层分级式实时以太网,其中骨干网选用ETB(Ethernet train backbone),车辆网络选用以太编组网(Ethernet consist network, ECN),用来承载电车控制数据及信息服务数据,以满足智轨电车编组分割与合并的需求。MVB与WTB的通信速率分别为1 Mb/s和1.5 Mb/s,而ECN与ETB的传输速率则可分别达到100 Mb/s与1 000 Mb/s[3-4]。此外,智轨电车在部分节点保留了CAN通信方式,以满足局部数据的传输需要。在网络层,智轨电车网络控制系统采用IEC 61375标准约定的列车实时数据协议(train real-time data protocol,TRDP)进行数据传输[5]。
2.2 冗余设计
智轨电车TCMS系统的可靠性关系到车辆的可用性。为降低系统故障率,提高系统可靠性,需采用较为可靠的冗余设计方案,以保证系统即使在关键部件失效时仍能正常工作。对智轨电车TCMS系统进行冗余设计时,从以下几个方面进行了考虑:
(1)骨干网络冗余。在骨干网络发生单节点故障时,网络可短时自恢复,以保证骨干网络的健壮性。
(2)控制数据冗余。对影响列车运行的控制数据,考虑其在单个网络传输时的冗余性,以确保关键数据实现列车级的冗余。
(3)子系统数据冗余。对关键子系统节点,考虑多节点接入,以保证单节点失效时子系统功能的正常性。
(4)IO(输入输出)冗余。对关键IO,采用冗余模块采集方式来保证IO的独立冗余性。
(5)CCU(主控单元)冗余。一个主控单元故障时,另一个主控单元可无缝接管,以保证车辆的正常运行。
(6)事件记录冗余。用于保证车辆行驶过程中数据记录的可靠性。
2.3 基于列车的系统简化
基于通信方式及其协议选择和冗余设计原则,从系统简化的角度,将车辆的牵引力分配、制动力分配及防滑控制等在传统轨道交通车辆中的功能移植到智轨电车TCMS系统,这一原则将大大简化智轨电车牵引及制动等系统的设计并节省成本。
利用以太网高带宽的特性,将传统轨道交通车辆中单独成网的乘客信息系统(passenger information system, PIS)和视频监控系统(closed circuit television,CCTV)等的信息服务数据流融合进智轨电车TCMS系统,以简化系统并节省成本。
3 智轨电车TCMS系统拓扑结构
智轨电车TCMS系统由CCU装置、交换机、IO采集模块及CAN网关模块构成,其中CCU装置包含CPU板卡、记录板卡及交换板卡。车辆交换机与CCU装置中的交换板卡是TCMS的网络节点设备,网络节点间的连接通过跨车以太网线缆完成,构成TCMS系统的基本拓扑。
3.1 以太网拓扑
对ETB网络(列车级),根据控制网络与信息服务网络的需求,分别构筑2套独立的环网,实现环网间的物理隔离并分别提供100 Mb/s 和1 000 Mb/s网络带宽。在环网结构中,环网协议保证环网的正常工作[6],且环网本身具备链路冗余,任意一个环网节点断开后均可以短时恢复。
对ECN网络(车辆级),系统通过交换机设置单个交换节点并提供100 Mb/s带宽,以满足车辆内部信息传输的需求。
图2示出车载双环以太网拓扑。图中,蓝色粗线所示为以太环网1,其由带交换电路板的CCU机箱及交换机组成,承载列车级控制数据,除PIS主控外,所有车辆控制单元包括CCU主控、车载信号ATC、辅助驾驶系统(ADS)等均通过ECN网络接入到环网1中;绿色加粗线所示为以太环网2,其由3台分布在不同车辆的交换机组成,用于承载列车级信息服务数据及信息服务控制数据。PIS系统及CCTV系统的数据在以太环网2中传输与交互。
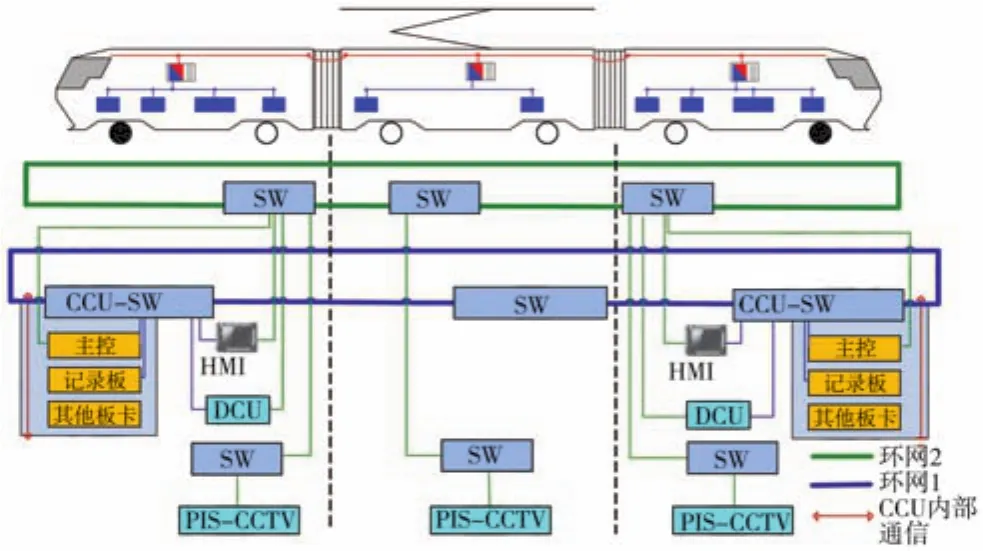
图2 车载双环以太网拓扑Fig. 2 Topology of the dual-loop Ethernet for autonomousrail rapid tram
车内关键设备包括CCU装置、牵引系统及人机交互(human machine interface, HMI)显示器等被布设了双网口,同时被接入到环网1与环网2中,以实现节点及端到端的冗余和关键部件的通信冗余。
3.2 CAN拓扑
列车部分设备采用CAN总线且分布在不同侧车厢。CAN数据通过各节车辆的CAN网关设备进行车厢内部的数据交互;网关设备接入交换机,通过ETB控制环网进行列车级数据交互,以实现车辆的控制、诊断及服务功能(图3)。
关键子系统可以通过2路CAN总线分别接入2台不同的CAN网关设备,实现2路不同的总线冗余。部分终端设备(图3中绿色标识设备)通过这种方式接入网络,从而实现数据的冗余传输。
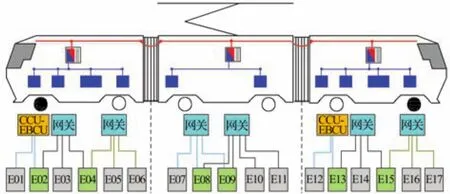
图3 CAN网络拓扑Fig. 3 Topology of the CAN networks
3.3 列车网络VLAN配置
智轨电车上不同功能的车载设备彼此间若不需要通信,则可通过设置不同的虚拟局域网(virtual local area network,VLAN)进行子网隔离,以防止广播风暴对整个网络带来的影响。对于关键数据,通过VLAN划分,使其具有跨VLAN通信的能力[7]。
为了确保数据的可靠性,在智轨电车TCMS系统中设置了多个VLAN对数据进行隔离。根据应用数据类型,TCMS系统中的VLAN分为3类:
(1)综合无线公网VLAN,负责同公网/外网的数据交互。智轨电车有多种控制/维护类数据需要进行上传或下载,将此类节点独立为一个VLAN段。
(2)控制VLAN,负责控制类数据传输交互。所有控制相关节点均属于该VLAN段,该VLAN段对数据的可靠性和实时性都有很高要求。
(3)无轨导向VLAN。无轨导向系统直接关联整车运行安全,为了保证无轨导向系统的可靠性,将无轨导向系统内网独立划为一个VLAN段。
3个VLAN之间依靠3层交换机以实现特殊数据间的跨VLAN通信;同时3层交换机中对跨VLAN通信的数据也进行了安全性配置,对需要转发的数据进行监控,以实现防火墙的功能。
4 智轨电车TCMS关键功能
智轨电车TCMS系统,除基本的列车控制与诊断外,还具有牵引制动融合控制、监视及安全防护等关键功能。
4.1 列车牵引制动融合控制功能
智轨电车运行模式在具备公路车辆特征的同时,也融合了轨道交通运营的特征。在列车自动保护系统(automatic train protection,ATP)人工驾驶及完全人工驾驶模式下,设置了3种列车运行模式:正常运行模式下,列车执行常用限速;当列车达到常用限速时,牵引封锁,转换为惰行模式;当列车速度超出列车限速一定值时,在人机交互HMI显示屏上进行报警并采取相应的自动刹车等措施。在应急牵引模式下,列车依靠车辆硬线实现列车应急牵引功能。在列车洗车模式下,实现列车低速限速,用于在低速情况下的洗车或其他工况。
智轨电车的速度信息,如列车惯导速度、制动系统速度、牵引系统速度及无轨转向系统速度等,源自不同的子系统。网络控制系统根据列车速度算法对多数据源的速度信息进行处理,从而计算出列车速度。在对各速度数据进行处理时,首先考虑单一速度源的可信度;在可信的前提下,对多数据值进行排序比对,在去除速度最大值与最小值后,对剩余数据取平均值,得到电车的列车速度。列车速度将被作为参照速度用来判断列车的滑行状态并进行防滑处理;同时其还将被作为列车运行的重要状态信息进行监控,一旦速度超过允许值,列车的牵引封锁功能即被触发,从而保证列车的安全运行。
除速度外,列车网络控制系统还对某些影响列车运行的条件进行监视,当条件不满足时,列车网络将封锁列车的所有牵引指令,同时在列车显示屏上显示“牵引封锁”提示信息。当列车牵引功能被允许(牵引封锁不成立)时,控制系统根据列车当前牵引、制动级位以及电机的力矩限制曲线计算出电机牵引力矩及其制动力矩,通过列车网络将力矩信息传递至电机控制器后,电机进行列车牵引和电制动力矩施加。
列车制动系统的气制动功能主要通过引发贯通全车的制动管路的压力变化致使刹车片与制动盘摩擦而完成。列车制动管路压力过低,则影响列车的正常运行。列车网络控制系统对空压机进行管控,以确保车辆制动及其他系统的正常用气。当气压低于某定值时,控制空压机进行工作;当气压上升到对应阈值时,控制空压机停止工作。由于气制动功能的施加依赖于气压变化及机械部件的动作,如仅依靠气制动来完成列车制动,则存在制动延时问题,会造成列车制动距离偏长。为提高列车制动响应的及时性,列车网络控制系统将电池管理系统(battery management system, BMS)反馈的实时状态数据(如当前允许的电池最大充放电电流及电压等)同牵引电机的牵引特性曲线进行拟合,计算出当前可发挥的实时电制动力。当列车制动力需求值低于电制动力值时,将全部投入电制动力以提高能量的使用效率。在列车制动力需求值高于电制动力值时,优先电制动,不足部分由气制动补足,以满足列车的制动需求。
此外,列车网络控制系统还对列车车门状态进行监视,并在列车显示屏上进行显示。列车开关门模式选择“网络”模式时,开门指令将发送至相应车门进行开关门功能控制。列车还通过显示器对空调系统进行控制,完成空调开关、温度、风速及模式等的设置。
4.2 监视及安全防护
智轨电车列车网络控制系统通过列车网络汇集来自于各个子系统的信息,包括子系统的运行状况及故障状况等信息。这些信息经列车网络系统筛选过滤后被送至列车车载显示屏上按系统进行显示及提示。当子系统状态发生变化,显示器上可实时显示列车信息,实现列车的监控功能。当网络控制系统接收到子系统状态异常信息时,可根据当前运行状况采取适当的防护措施,以减少可能产生的运行风险。下面以辅助驾驶系统故障状态为例介绍控制系统的安全防护功能。
车辆辅助驾驶系统根据感知结果控制车辆的横向运动路线。当感知部件失效或感知结果不可信时,系统将相应状态信息传送给车辆网络控制系统。车辆网络控制系统接收到相应状态信息后即传送给HMI系统,由其提示驾驶员及时进行相应操作;同时控制系统控制车辆并执行牵引封锁动作,以降低事故风险。如在规定时间内驾驶员未能进行有效介入,则进一步触发安全动作,使列车按照相应减速度停车。
车辆网络系统除对辅助驾驶系统执行工作状态监控并进行安全动作保护外,还对辅助电源、无轨导向及车门等执行相应监控并进行安全动作保护。
4.3 列车信息服务
智轨电车列车网络控制系统为车辆信息服务提供可靠的传输通道。下面以列车环视功能为例,介绍其相应的服务功能。
列车使用车身周围广角摄像头对车周信息进行实时采集,并将所采集的同一时刻多路视频影像处理成一幅车身俯视图后在列车显示屏上进行展示,以便驾驶员查看车辆周边环境。图4示出列车环视原理,列车网络为摄像头到视频融合处理器、视频融合处理器到列车显示器的视频传输提供通道。列车环视对视频数据的同步要求较高,因此列车网络所提供的传输通道需满足低时延、高速率要求。
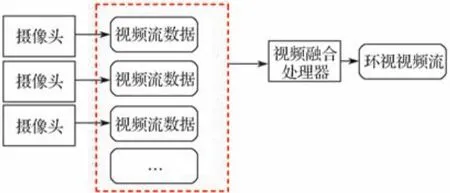
图4 列车环视原理Fig. 4 Principle of the bird’s eye view system
除列车环视功能外,列车网络还为车载信息服务系统、车载闭路电视系统及车载摄像头等提供传输通道。得益于以太网的低时延、高速率等优势,车辆信息服务系统可以传输大量信息内容,为列车信息化提供有力保障。
4.4 多网融合条件下冗余信息处理与响应
智轨电车具有双环网结构(图2),其中环网1为列车控制网,环网2为信息服务网。正常情况下,环网2内为信息服务数据,同时也包含部分需要冗余的控制数据,通过多网融合技术实现控制数据域信息服务数据的融合,并根据环网1数据包与网络实际情况完成数据的热备冗余。
冗余信息的处理,可使列车在系统部分失效时其功能仍能保持正常或受影响较小。这一冗余实现了在列车骨干线束断开、部分数据失效情况下系统功能的短时自恢复,对车辆运行影响较小。
关键部件的双网口接入,实现了子系统在节点失效、IO失效、主控单元失效或事件记录单元失效时的热切换,从而不影响列车正常的运行功能。例如,辅助驾驶系统双网口接入,即便某个网口失效,仍能通过冗余网络接口接收到列车主控的数据,从而保证自身系统功能正常。2个列车网络CCU单元间通过列车网络交互信息,正常时默认单个CCU单元完成车辆控制功能,另一CCU单元保持热备状态;当作为主控的CCU单元发生故障时,另一CCU单元通过交互信息检测进行判断和热备切换。
5 结语
目前,由TCMS系统与信息服务系统融合而构成的列车控制与服务网络(train control and service network,TCSN)系统被安装在智机电车上并已安全运营20万km以上里程。在运营过程中,TCSN系统稳定可靠,列车以太网控制性能与稳定性优良,信息服务网络能保障服务数据的正常传输。TCSN系统在为智轨电车提供性能良好的网络控制服务及足够带宽的同时,还减少了电车的布线量,节约了一定的成本。未来,TCSN系统还将进一步提供信息化通道,为更加人性化的乘客信息服务提供载体。
智轨电车运行环境更接近于公路交通环境,采用双环网结构的TCSN系统将在智轨电车二代平台上提供具有冗余且更加可靠的控制服务网络以及与之隔离的信息服务网络,为车辆的稳定可靠运行及更加丰富的信息服务内容提供可靠的通道。
车辆的控制与服务网络融合已成为未来发展趋势,车载TCSN系统不仅可以满足车辆内部局域网的控制与信息服务功能,还为车辆间大量数据的传输保留了接口。随着无线通信技术的发展(如5G技术的出现)[8],TCSN系统将在列车边缘计算及云端实时连接与数据提供方面提供相应服务,结合高精度位置信息的利用,可为车辆自动驾驶、编队行驶等方面提供服务。
