管制-飞行状态相依网络模型及特性分析
2020-07-31李昂聂党民温祥西王泽坤
李昂,聂党民,温祥西,*,王泽坤,3
(1.空军工程大学 空管领航学院,西安710051; 2.国家空管防相撞技术重点实验室,西安710051;3.中国人民解放军32211部队,榆林719006)
随着中国航空技术的快速发展,近年来,中国不断开辟新的航线,修建新的机场,航路点、管制扇区和航空器的数量也随之大大增加。这些变化推动航空运输业越来越发达,但与此同时,也使得空管系统的网络结构也越来越复杂,给空中交通管制工作带来了巨大的压力。空管系统中的机场、航路点、管制扇区、航空器等组成部分之间都存在着一定的关系,如机场与机场之间有通航关系,管制扇区与管制扇区之间有移交关系,它们之间的关系共同构成了一个复杂的系统。其中,管制员和航空器是空管系统的主体,对系统运行起着决定性的作用。因此,本文拟对管制员和航空器之间的相互关系进行研究,可以为航空器防相撞、扇区划分以及管制员工作负荷等研究提供有力的支撑。
现实世界中的许多复杂系统,从拓扑结构的角度看都可以抽象为网络[1-3],如丁连红等[1]将知识图谱抽象为一个网络,而空管系统也可抽象为一个复杂网络,于是人们开始将复杂网络模型应用于空管系统的研究中,这些研究主要分为空中网络和地面网络2个方面。在空中网络方面,赵昱等[4]运用复杂网络研究机群作战特性;Jiang等[5]将空中的飞机作为复杂网络的节点,使用独立成分分析较好地识别了空中交通拥堵的情况;武喜萍等[6]、陈才龙[7]和吴小欢[8]都是以机场为节点研究空中交通流量的优化问题;黄洋等[9]研究了无人机飞行冲突解脱算法;Wang等[10]提出了一种基于复杂网络的无人机群鲁棒性的评价方法,为无人机群的任务规划和决策提供了一定的指导。在地面网络方面,王兴隆等[11]以管制扇区为节点建立了管制扇区网络模型;朱新平等[12]建立了陆基导航保障系统的网络模型;涂从良等[13]提出了一种基于接近度和评价矩阵的关键机场节点识别算法,准确反映出中国关键机场的重要度排序。
在现实世界中,完全独立的单层网络几乎是不存在的,绝大多数网络都是和其他的网络相互耦合,彼此依存。Buldyrev等[14]于2010年提出相依网络的概念,其最初的理论认为每层网络的节点数相同且只存在一一对应的关系,但现实世界中符合该假设的系统仍然很少。继而Parshani等[15]提出了部分相依网络的概念,放开了所有节点必须一一对应的限制,每层网络中只有随机数量的节点与另一层网络中的节点一对一相依。后来,Shao等[16]又提出了一对多的相依网络模型,即某一层网络中的节点以某一概率与另一层节点相依。王兴隆等[17-18]将相依网络的概念应用于航空领域中,以机场、航路点和管制扇区这3层网络相耦合构建了相依网络,而在空中交通管制系统中,管制员和飞行员是主要组成部分,对他们之间关系的研究显得更有意义。地面的管制员对空中的飞行员下达指令,对航空器进行指挥调配,地面的管制网络和空中的飞行状态网络这两层网络彼此紧密相连,又相互依赖,满足相依网络的构建条件。因此,本文在笔者团队之前工作的基础上,将地面的管制网络与空中的飞行状态网络[19]结合在一起建立了一个相依网络模型,并对网络的各项指标进行分析,可为空管系统的运行和管制员决策提供理论支持。
1 相依网络模型
若某网络内部的多层网络间存在相依性,则该网络被称作相依网络[20]。
飞行状态网络中,距离较近的航空器之间可能存在冲突关系,飞行员之间可通过无线电进行交流。管制网络中,相邻扇区之间存在移交关系,管制员需要通话来移交航空器的管制权。2层网络间,飞行员需要听从管制员的指挥才能保证空中交通的安全。飞行状态网络和管制网络相互耦合所构成的网络中,2层网络的节点类型不同且网络间存在强依赖关系,因此该网络属于相依网络。
为了研究方便,本文对模型中的一些方面进行了简化假设:
1)在飞行状态网络中,考虑到航空器的经济性和舒适性,巡航时航空器都是定高飞行,因此本文不考虑航空器的高度信息,只考虑飞行状态网络的二维状态信息。
2)本文研究的是该相依网络模型某一瞬间的特性,仅考虑航空器的相对位置对边权的影响,不考虑相对速度对边权的影响。
3)在实际中,管制扇区的形状和高度对管制移交没有影响,所以本文用方形区域来表示管制扇区。
1.1 飞行状态网络
本文的飞行状态网络以航空器为节点,以航空器之间的影响为边。国际民航组织8168号文件规定,ACAS(Airborne Collision Avoidance System)询问其他装备应答机飞机的范围为26 km,本文以航空器为节点,26 km为半径作圆,若两圆出现了交集,便说明这两架航空器之间存在潜在冲突,且这种冲突可能会对整个网络造成影响,则这2架航空器之间就构成了连边,从而建立飞行状态网络G1,如图1所示。
设定边权只与航空器之间的空间距离有关,距离越近,边权越大。边权计算公式为

式中:ωij为i和j两航空器节点之间的边权;Dij为i和j两航空器节点之间的空间距离。
在进行管制指挥时,若航空器分布得较松散,则对管制员造成的心理压力较小;反之,若分布很紧凑,管制员则需要高度集中注意力,一刻都不能分心,这样对管制员造成的负荷较大。因此,本文用航空器节点在飞行状态网络这一单层网络中的点强qi来衡量单架航空器的管制难度,计算公式为

式中:qi为航空器节点i的管制难度;ni为与航空器节点i构成连边的航空器节点的集合。
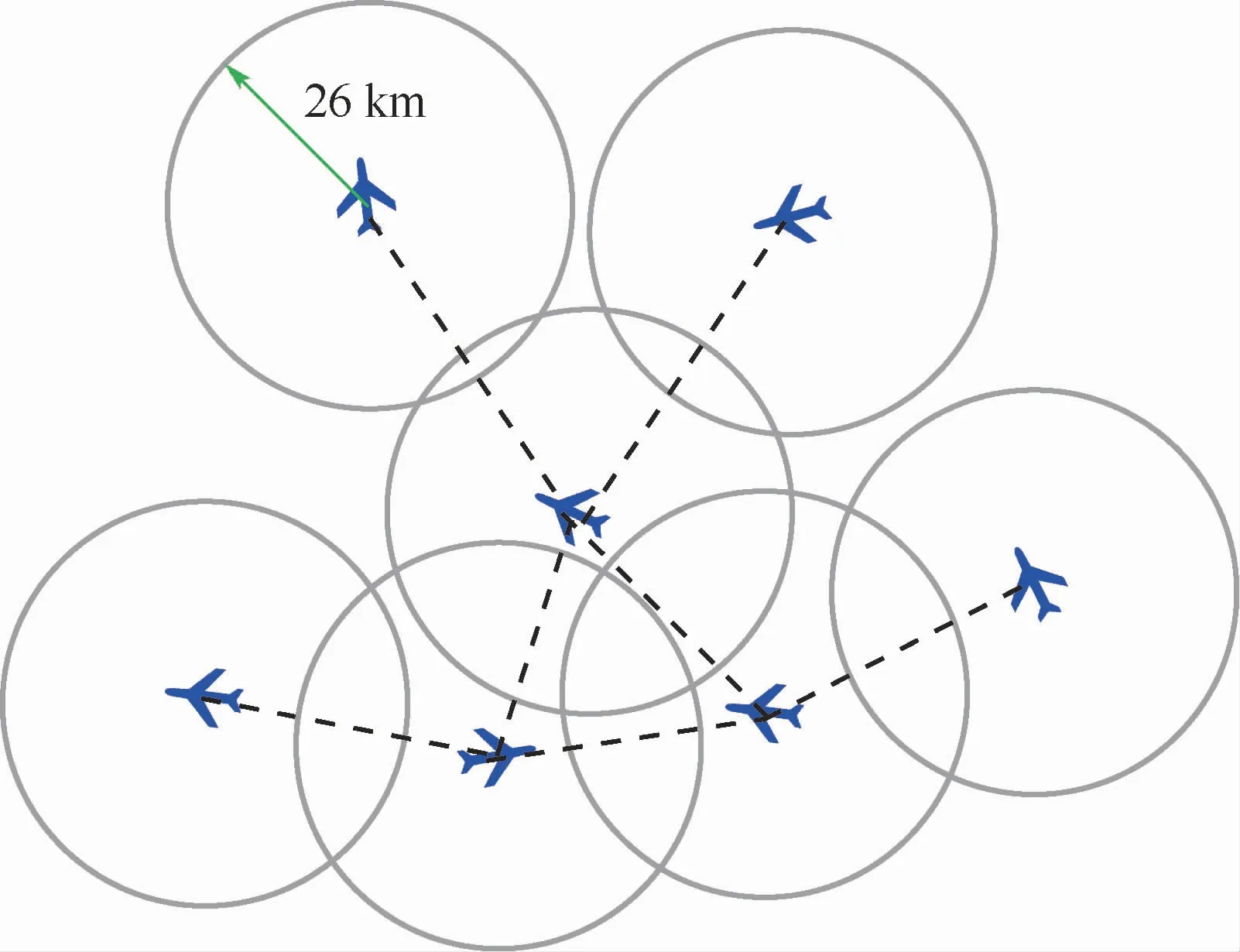
图1 飞行状态网络示意图Fig.1 Schematic diagram of aircraft state network
1.2 管制网络
管制扇区是飞行管制的基本单位。管制网络G2以管制扇区的几何中心为节点,以扇区之间的移交关系为边,整个管制网络是一个无向无权网络。扇区节点的编号以及各管制节点间的连接方式如图2所示。
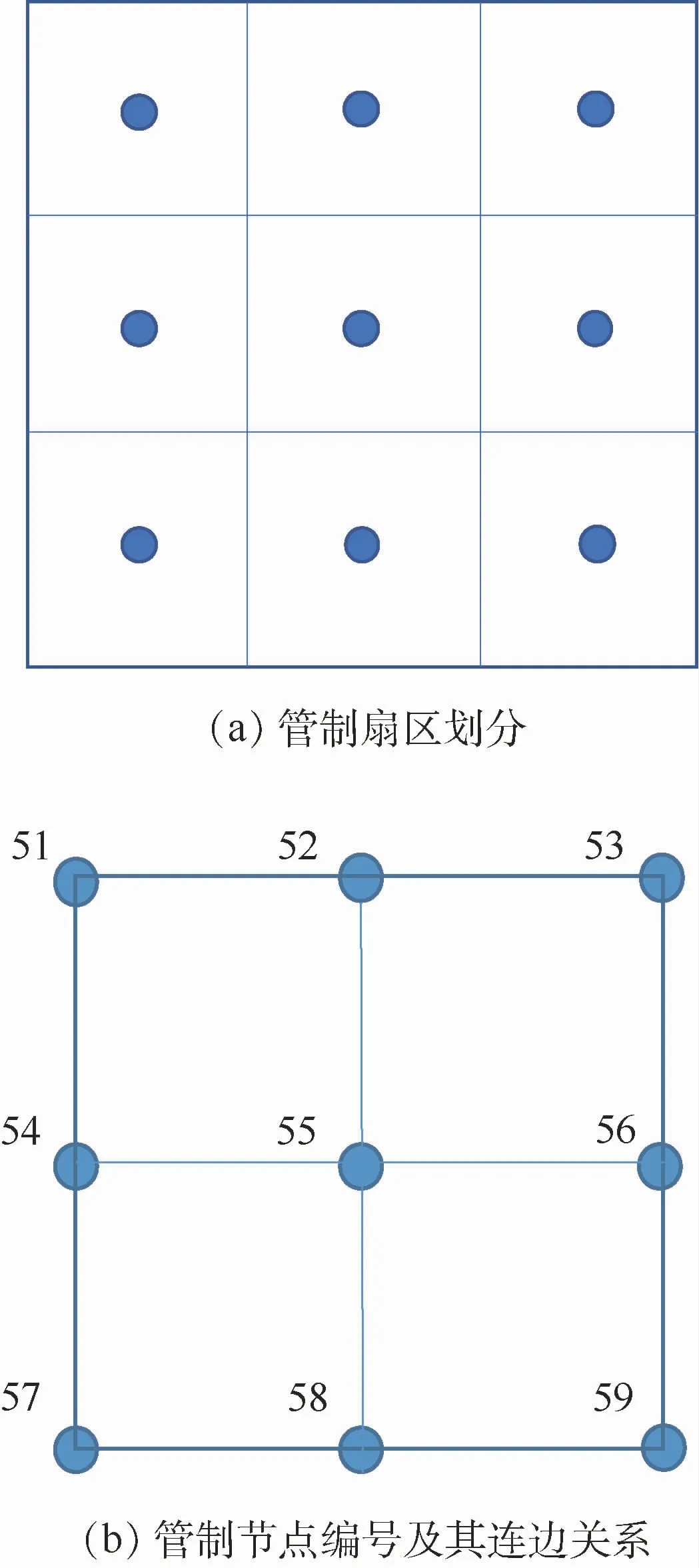
图2 管制网络Fig.2 Control network
1.3 相依网络
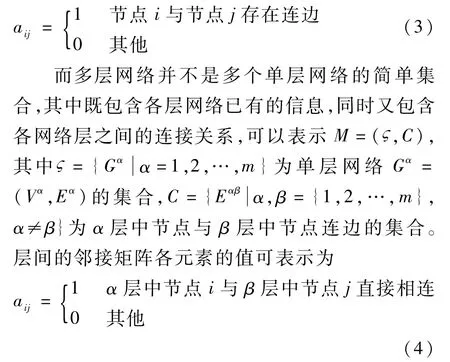
一个单层网络通常被描述为一个包含节点V={vi,i={1,2,…,n}},连边E={eij≠0,vi∈V,vj∈V}的集合,即G=(V,E),网络中各元素之间的关系可以由邻接矩阵A=(aij)n×n表示,n为网络中的节点个数。
管制员工作时,不仅要对本扇区内的航空器进行实时监控与指挥,还要时刻注意相邻扇区的航空器及其可能带来的安全隐患,所以相邻扇区的航空器节点也会对本扇区的管制节点造成影响。因此,每个管制节点都与本扇区内及相邻扇区的航空器节点构成外边连接,而对于每个航空器节点,则与所属扇区和相邻扇区的管制节点构成外边连接。
如图3所示,上层为飞行状态网络G1,下层为管制网络G2,G2中的每个管制节点都负责管辖G1中的若干架航空器,层内连边关系如黑色实线所示,层间连边关系如虚线所示。G1中的实线表示航空器之间的冲突影响情况,G2中的实线表示管制扇区之间移交关系,而层间的虚线则表示管制员对航空器的指挥和调配,只有在管制节点都正常工作时航空器才能进行正常的飞行。
在空管工作中,不同的航空器对管制员的影响程度是不同的。若1架航空器四周短距离内有许多架航空器,局部网络非常密集,则该航空器指挥调配起来就较为困难,对管制员的影响程度就较大;相反,如果1架航空器处于1个很松散的局部网络内,周围很大范围内都没有航空器,则该航空器对管制员的影响程度就很小。因此,本文将外边进行加权,用来表示航空器对管制员的影响程度。
管制节点与本扇区内航空器节点间的外边权重为航空器节点的管制难度,即

式中:i为航空器节点;p为管制节点。
通常情况下,管制员对相邻扇区的航空器只进行监控,不进行指挥调配,关联程度较弱,所以本文将管制节点与相邻扇区的航空器节点之间在正常情况下的外边权重设为

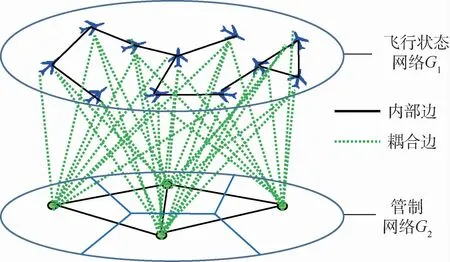
图3 相依网络示意图Fig.3 Schematic diagram of interdependent network
2 仿真场景
为了验证算法的有效性,本文对实际场景进行了模拟,该仿真场景具有一定的代表性。在一片进近管制空域中,航空器需要完成航路空域和机场空域之间的飞行转换,那么必然会存在航空器分布不均匀的情况。为了贴合实际情况,本文在300 km×300 km的范围内,通过MATLAB软件随机生成50架航空器,航空器位置分布、编号和连边关系以及各航空器的扇区分属情况如图4所示。在实际场景中,可能有某一片空域航空器非常密集,如图4中55号管制节点所管辖的空域,也有可能某一片空域中航空器极其稀少,如51号和57号管制节点所管辖的空域,而11号这种特殊的孤立航空器节点在现实中也是有可能出现的。
根据层内和层间的连边及边权的设置方式,将2个单层网络以及整个相依网络的部分加权邻接矩阵展示如下。
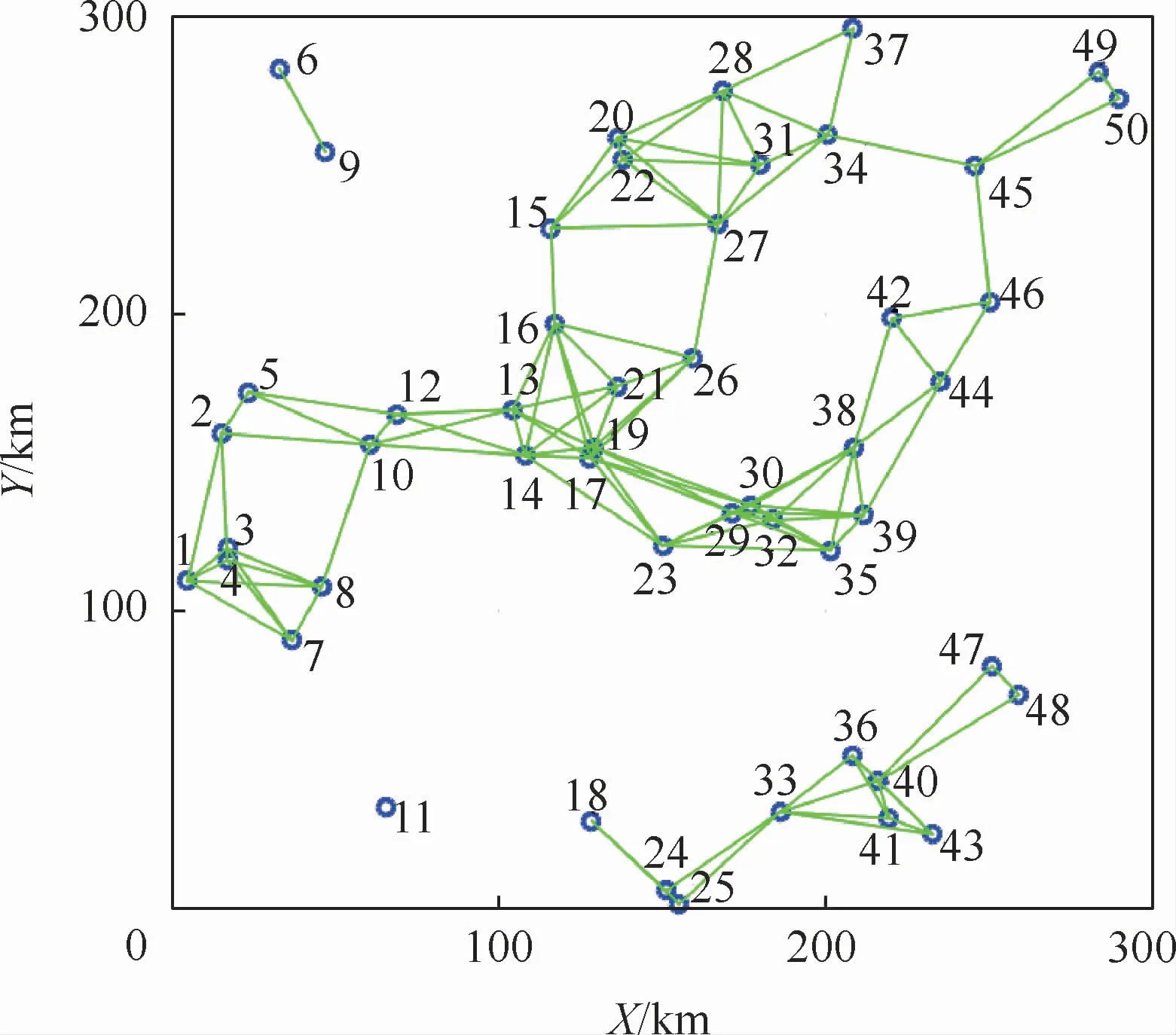
图4 相依网络模型仿真示意图Fig.4 Simulation diagram of interdependent network model
1)飞行状态网络的加权邻接矩阵
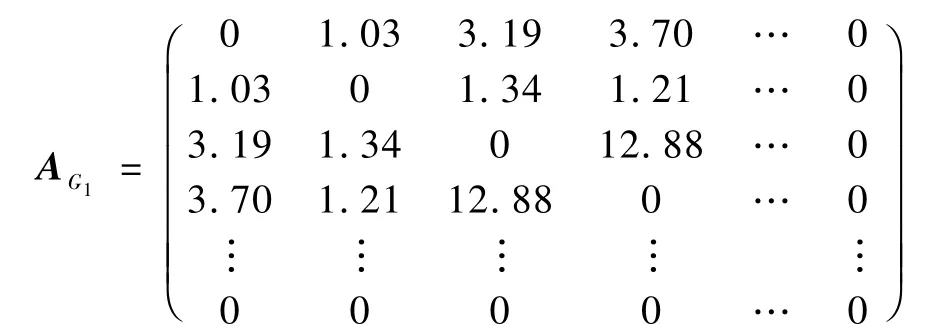
该矩阵为50×50矩阵,表示两架航空器之间的权重。
2)管制网络的邻接矩阵

该矩阵为9×9矩阵,表示了各管制节点之间的连边关系,若构成连边关系,则aij=1,否则aij=0。
3)相依网络的邻接矩阵

该矩阵为59×59的矩阵,可将其分为4块,分别为左上、右下、左下和右上。其中,左上方的50×50矩阵为航空器网络的加权邻接矩阵,右下方的9×9矩阵为管制网络的邻接矩阵,左下方和右上方的矩阵互为转置矩阵,均表示相依网络层间连边的权重。
3 仿真分析
3.1 单个节点特性分析
下面从度、点强以及加权聚类系数这3个方面来进行分析。
1)度
在相依网络中,节点的度可分为内度与外度之和。内度即与该节点相连的同一层网络中的节点个数。在飞行状态网络中,航空器节点的内度表示与该航空器之间可能存在安全风险的航空器数量。单从内度这个角度来看,航空器内度越大,其安全风险越高。在管制网络中,管制节点的内度表示与该管制扇区存在移交关系的扇区个数,内度越大,则该管制员与相邻扇区通信联系的工作负荷越大。外度即与该节点相连的不同层网络中的节点个数,航空器节点的外度主要表示与地面通信时可供其选择的管制扇区数量,而管制节点的外度表示能够与其直接通信的航空器数量。节点i的度ki可表示为

式中:ki1为节点i的内度;ki2为节点i的外度。
将相依网络中各节点的度进行计算,结果如表1所示。
如表1所示,编号1~50表示飞行状态网络中的航空器节点,编号51~59表示管制节点,由于版面所限,对部分节点的度进行了省略。
如图5所示,管制节点的度普遍高于航空器节点,这是因为管制员需要联系的单位多于飞行员,飞行员的主要工作还是在于驾驶航空器。而管制节点中,55号节点度最高,因为55号节点相邻扇区数最多,管辖空域内航空器的数量最多且空域复杂性较高,如图4所示。

表1 节点度的数值Table 1 Numerical value of node degree
2)点 强
加权的节点度之和即是节点点强si。点强在度的基础上进行了加权,不仅能够反映与其相连节点的数量,还能反映其相邻节点对其造成影响的总量。由式(5)和式(6)可知,层间连边的权重由飞行状态网络确定,所以航空器节点的点强表示了该航空器与其周围航空器的冲突情况,管制节点的点强可用来表示管制员工作负荷的大小。其表达式为

图5 节点度的分布Fig.5 Distribution of node degree

式中:N为相依网络的总节点数。
计算各节点的点强,结果如表2所示。
由图6可以看出,在飞行状态网络中,只有3、4、17和19号航空器节点的点强较高,说明这几架航空器周围的空情较为复杂,管制员需要花更多的精力来关注这几架航空器的飞行状态;在管制网络中,55号节点的点强远远高于其他节点,在一定程度上可以反映出55号扇区管制员的负荷较大,可以考虑缩小55号扇区的范围或者增派管制员来降低管制员的负荷。

表2 节点点强的数值Table 2 Numerical value of node weight
3)加权聚类系数
某一节点的所有邻居节点间实际相连的边数与理论上最多能够相连边数的比值叫做节点聚类系数。而加权聚类系数c(i)还考虑了节点间的权重,两节点间距离越近,权重越大,对加权聚类系数的贡献越大。航空器节点的加权聚类系数表示该航空器的周围航空器的聚集程度,管制节点的加权聚类系数表示该管制扇区以及相邻扇区内所有航空器之间的聚集程度,加权聚类系数越大,聚集程度越高。其表达式为

式中:m和n分别为节点i的2个相邻节点。
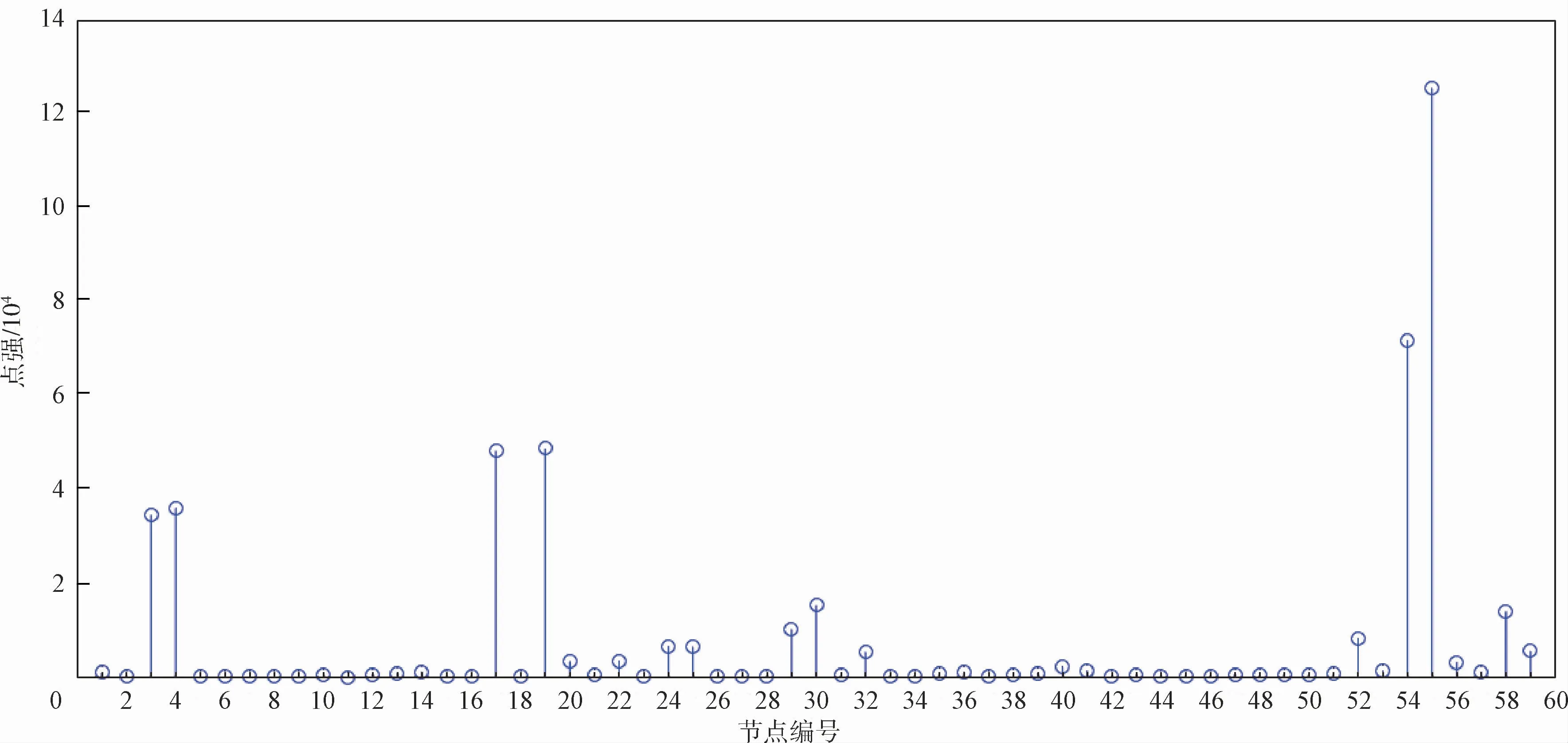
图6 节点点强的分布Fig.6 Distribution of node weight
计算各节点的加权聚类系数,结果如表3所示。
如图7所示,航空器节点的加权聚类系数普遍高于管制节点,这是因为管制节点连接的航空器节点数量过多,而这些航空器节点又分布在不同的的扇区,彼此之间相连的并不多,使得所有管制节点的加权聚类系数都较低。11号节点的加权聚类系数为0,而在图4中,11号航空器属于孤立点,所以该结果与图4相符,而36号节点的加权聚类系数较高,这也与图4中36号航空器节点周围航空器的聚集程度较高的情况相符。
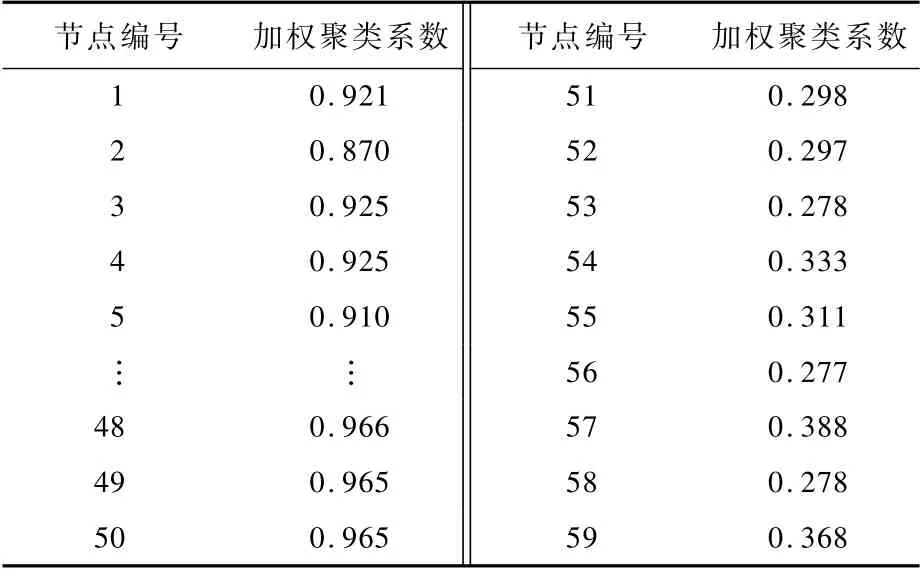
表3 节点加权聚类系数的数值Table 3 Numerical of weighted clustering coefficient of node
3.2 整体网络特性分析
本文首先通过假设若干管制节点失效,然后研究在这几种不同的情况下整个网络的特性。
在一般的相依网络中,若有节点失效,会导致整个网络发生级联失效,而在空管系统中,若有管制员出现意外情况无法正常工作,其管辖扇区内的航空器并不会随之失效,只是处于一种无人管的状态,需要将这些航空器的管制权进行重分配,暂时分给相邻扇区的管制员进行管制。因此,本文选取了一块地区中4个地理位置特征明显的扇区使其分别失效,根据就近原则以及相邻扇区空域情况,规定了管制节点失效后扇区内航空器管制权的重分配规则,如图8所示。
下面从网络效率和鲁棒性2个角度来分析相依网络的特性。
1)网络效率
网络的效率反映了网络的连通程度。任意2个节点间的效率表示为2个节点之间距离的倒数,而整个网络的效率NE为任意2个节点间效率的平均值,表示网络中任意一点联系到另一点需要的平均中转次数。其表达式为
式中:dij为节点i和节点j间的最短路径。
2)鲁 棒 性
鲁棒性是指控制系统在一定(结构、大小)的参数摄动下,维持其他某些性能的特性。而在本文中,将鲁棒性定义为:删除任意节点后,网络中仍可连接的节点数与网络中总节点数之比,鲁棒性计算公式为

式中:T为删除节点后所有剩余节点的集合。
由网络效率和鲁棒性的定义可知,这2项指标均可表示管制网络对飞行状态网络的控制力度,网络效率和鲁棒性越高,控制力度越强。整个相依网络的网络效率和鲁棒性在5种不同情况下的数值如表4所示。

图7 节点加权聚类系数的分布Fig.7 Distribution of weighted clustering coefficient of node
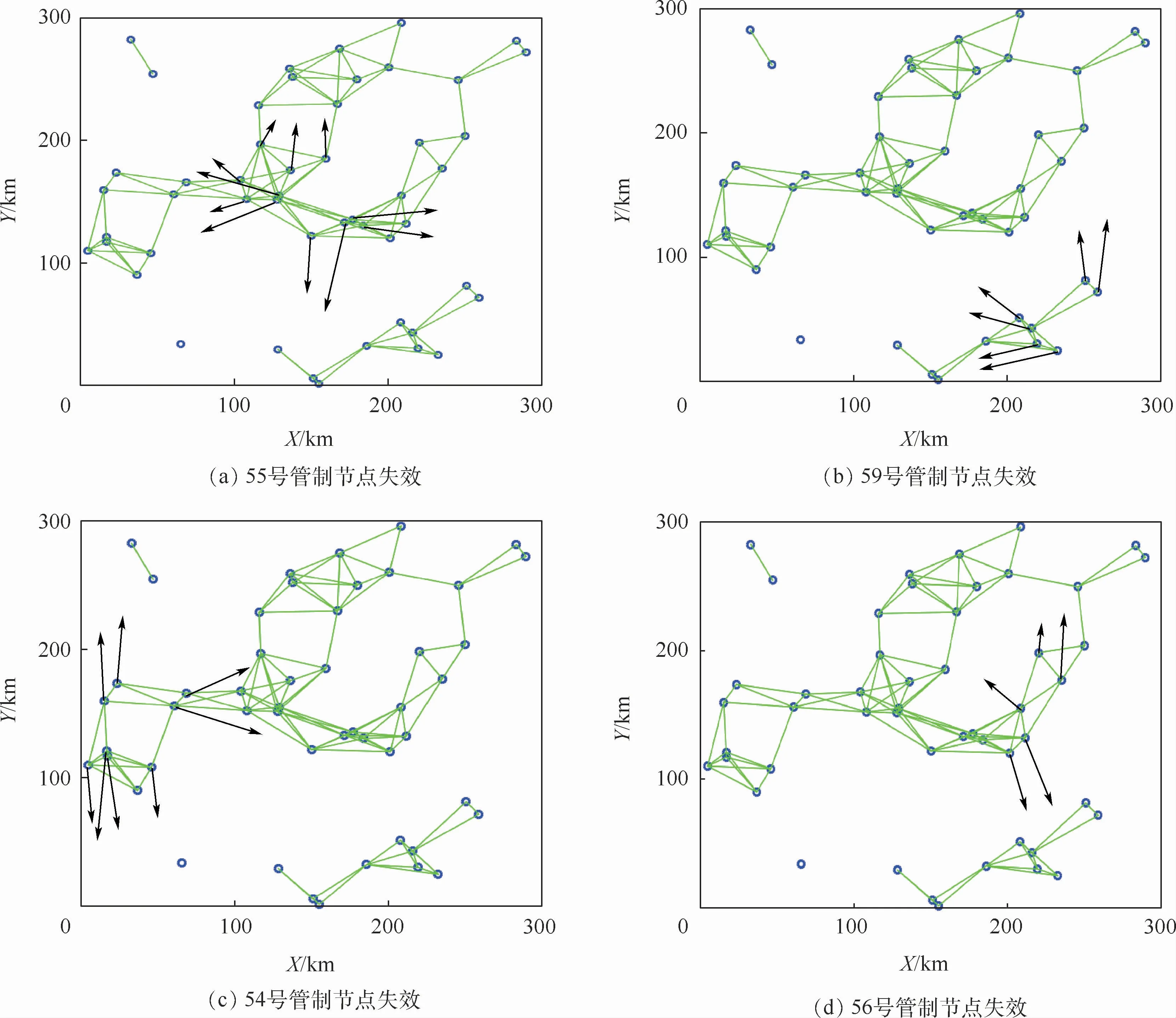
图8 管制节点失效后管制权的重分配规则Fig.8 Redistribution rule of control power after control node failure
将2项指标的变化情况制成柱状图,如图9所示。图中:场景1表示正常情况,场景2表示55号管制节点失效,场景3表示59号管制节点失效,场景4表示54号管制节点失效,场景5表示56号管制节点失效。
场景2、3、4分别表示3种类型的管制节点失效,它们分别具有4个、2个和3个相邻管制节点。纵向比较这2幅图的场景1、2、3、4,可以发现,这2项指标的变化大致呈现出相同的规律:正常情况下的网络效率和鲁棒性都高于有节点失效的情况,这说明管制节点失效使得管制网络对飞行状态网络的控制力度有所减弱,而相邻节点越多的节点失效,网络效率和鲁棒性降低越多,说明失效节点所处地域越重要,管制网络对飞行状态网络的控制力度减弱得越多。

表4 相依网络拓扑指标Table 4 Topological index of interdependent network

图9 相依网络全局指标变化情况Fig.9 Change of global index in interdependent network
场景4和5分别表示54号和56号管制节点失效,它们的相邻管制节点数均是3个。横向比较场景1、4、5,可以发现,虽然相邻节点数相同,但54号扇区内航空器的数量以及分布的密集程度明显比56号扇区复杂,所以54号节点失效时管制网络对飞行状态网络的控制力度减弱程度较大。
4 结 论
本文构建了一种由飞行状态网络和管制网络相互依存而构成的相依网络模型,并根据实际情况设计了飞行状态网络的层内连边以及2层网络的层间连边的权重。通过仿真实验,可以看出所构建的相依网络能够较好地反映管制系统的情况,对其特性分析可以得出:
1)航空器节点的节点度和点强可以得出航空器之间的冲突情况,为航空器防相撞工作提供一定的参考。
2)依存边的权值能够反映管制员的工作负荷情况,对其分析可以找出工作负荷过大的管制员,及时调整管制策略,保持整个系统运行安全稳定。
3)网络的鲁棒性以及网络效率全局指标能够反映管制节点对整个网络的管控情况,可为后续的管制移交、扇区优化等研究提供一定的参考。
