运输履带式消防机器人装备车
2020-07-31徐鹏1张韵2
徐鹏1 张韵2
1.唐山亚特专用汽车有限公司 河北唐山 063000
2.汉阳专用汽车研究所专用汽车杂志社 湖北武汉 430056
1 前言
伴随着中国经济发展与国内相关行业技术水平的不断提高,新能源以及新型材料的应用逐渐普及。此类由新技术或新材料引发的火灾,使得我国消防工作面临新的挑战。在国内,为了更好地解决此类问题,大批新型履带式消防类排烟、侦查以及灭火机器人应运而生。相对应的,为解决机器人的中间转运和维护问题,实现发生灾情时能够快速开展消防工作并缩短消防设备响应时间的目的,笔者研发了一种新型消防机器人运输类专用车辆。
2 专用车结构和功能预期
此类专用车由汽车二类底盘、功能性箱体、机器人专用固定防护装置、多功能尾门以及加强支腿等机构组成。设计中尾门加装液压驱动系统,经尾门下侧翻转支撑结构实现尾门翻转开合,且尾门完全打开后可作为机器人上、下车通道。功能性箱体需满足4台消防机器人的运输空间要求,同时可实现消防机器人的能源补充、消防指挥操作、灾情现场夜间照明以及现场监控等系列功能。
装备车整体外形如图1所示。
2.1 底盘选取
首先,此类专用车主要使用群体为消防相关部门,故在底盘选择中车辆可靠性与稳定性成为首要指标。其次,车辆二类底盘需在满足承载要求的同时具有良好的动力性能以及路面通过性。

图1 运输履带式消防机器人装备车外形简图
综合考虑以上要求,选择一款车辆二类底盘,其主要性参数如表1所示。
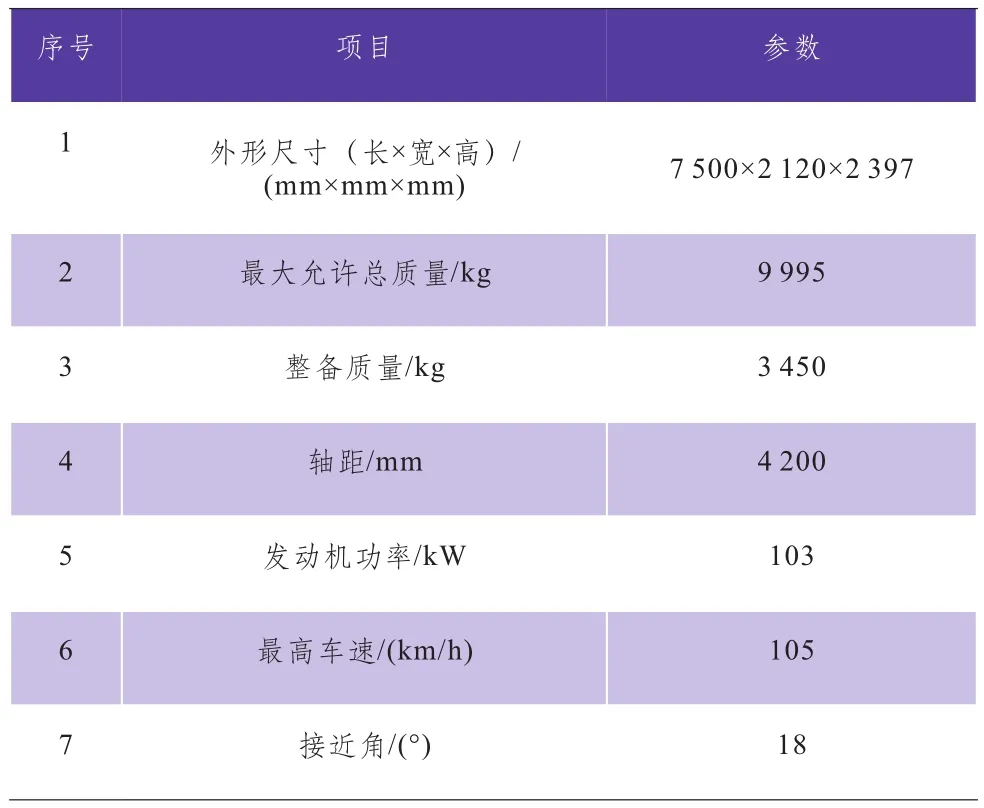
表1 车辆二类底盘性能参数
2.2 多功能箱体设计
如图2所示,封闭式多功能箱体主体由裙板结构组成,主体结构共分前后两部分。箱体前部装有附件箱,消防水袋柜、防化服放置架和发电机安装仓;箱体后部为机器人转运仓,内部设置有机器人定位与固定装置。
箱体外沿下侧安装有裙边箱体,用作车辆工具箱以及电控、液压控制系统的安装。根据上述功能区域划分与对应的空间要求,多功能箱体整体尺寸(长×宽×高)设计为4 450 mm×2 450 mm×2 400 mm。箱体底板采用碳钢骨架结构,其上铺装铁质花纹板(或碳钢骨架结构上铺竹胶板与铝质花纹板组合结构);箱体侧板使用玻璃钢夹心复合板材(或碳钢骨架铺装铝板)通过铆接形式紧固组装,多功能箱体整体结构具有刚度强,质量轻,外观简洁、美观的特点。

图2 多功能箱体示意图
2.3 机器人专用固定与防护装置设计
多功能箱体内机器人转运区设置有机器人固定装置。通过安装于箱体内的收紧带固定架实现消防机器人的履带固定,最终达到固定机器人的目的。为方便人员进入箱体后部进行机器人固定操作或相关维护检修,箱体侧板安装有卷帘门。箱体两侧安装有踏板挡板装置,一方面该装置可用于人员由箱体侧边进入车厢的辅助踏板,另一方面可作为机器人防侧滑机构。
2.4 尾门设计
箱体后侧装有液压驱动式翻转尾门,通过油缸的伸/缩实现尾门旋转座绕固定销轴的旋转运动,进而实现尾门的开启和收回。尾门设计应具足够的刚度,满足机器人上下车时对其支撑机构承载的要求。尾门收起后可作为多功能箱体的后门使用,为保证箱体具有一定的防雨/防水功能需要加装配套的后门密封与防松装置。
2.5 支腿的设计
专用车辆在实际使用中可能存在搭载更大自重的消防机器人的情况,在机器人上下车时,由于车辆装载质心发生变化容易对车辆后桥形成一定的冲击,为避免这一现象,车架两侧加装液压支腿用于支撑车辆,保证箱体底板水平度,进而提高车辆在作业中的稳定性。
3 整车结构布置
结合选定底盘与预期功能对专用车整车结构与布局进行设计。综合考虑车辆质心位置、整车高度、行驶风阻等因素对车辆机械与外形结构进行设计。设计中加入扶梯与蹬车踏板等操作辅助装置,提高人机融合度,简化功能操作。
装备车结构简图如图3所示。
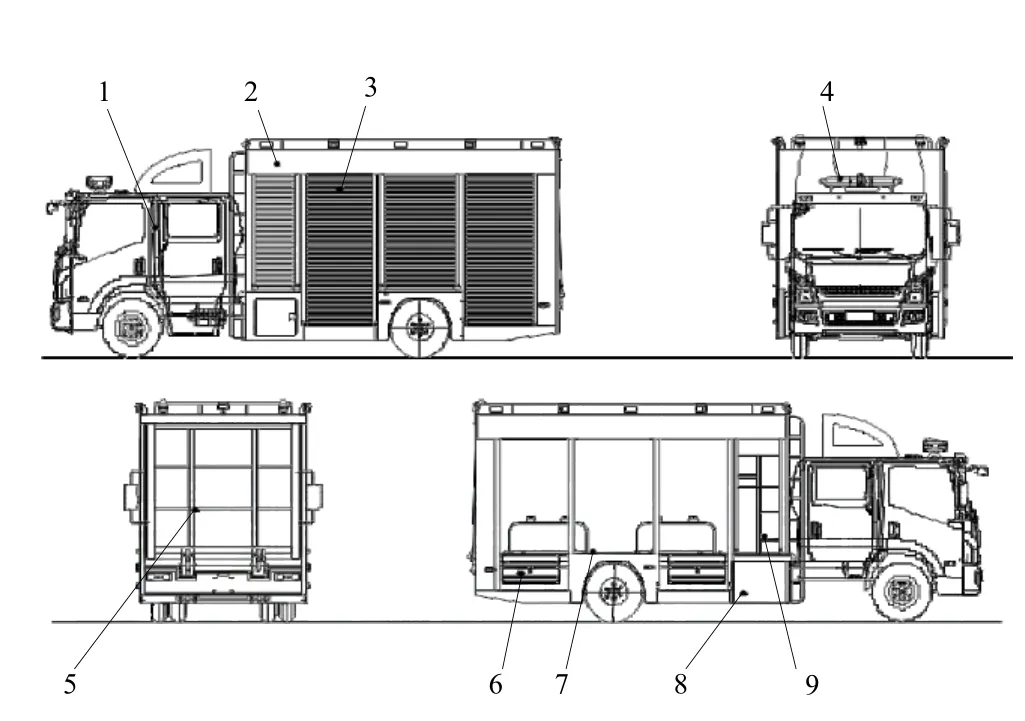
图3 装备车结构简图
根据运输履带式消防机器人装备车设计及计算结果,定义装备车整车技术参数如表2所示,实际车辆图片如图4所
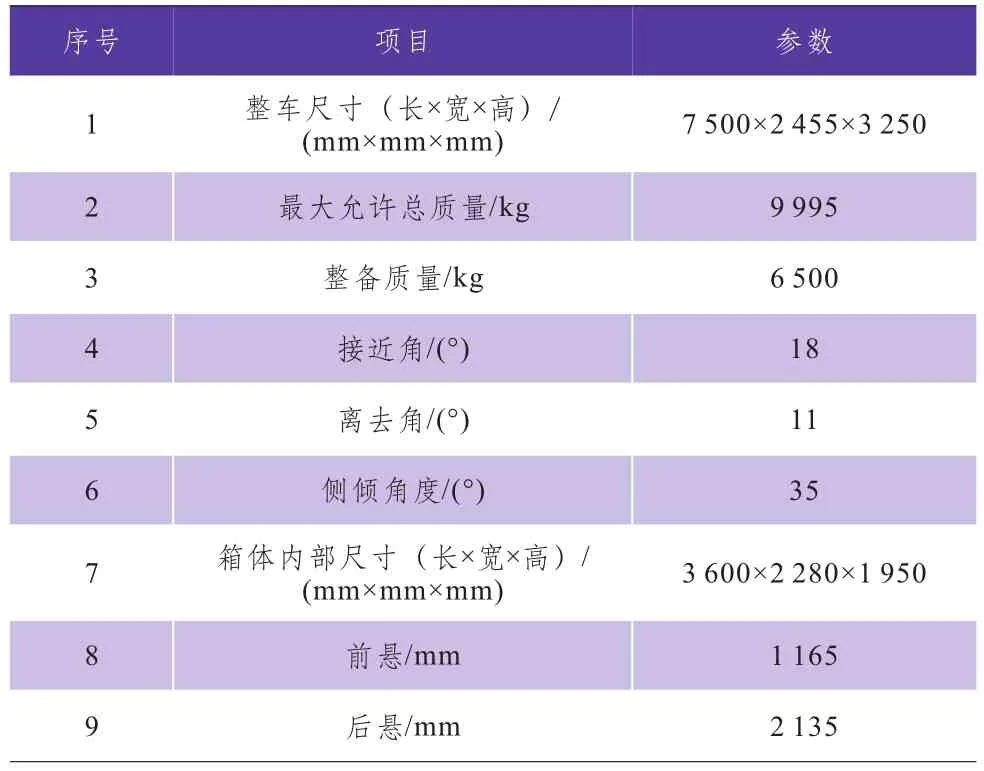
表2 装备车整车参数
4 液压系统设计
车辆尾门与支腿功能所需液压控制系统原理图如图5所示。液压油泵由车辆底盘变速箱取力器输出端带动向液压系统提供动力,原理图左侧油路用于控制车侧四条液压支腿工作,支腿油缸油路装有电磁截止阀与液压锁,用于支腿内位置锁止。原理图右侧回路用于尾门两个油缸的控制,管路中加装液压锁,避免驻车、停车过程中尾门受重力作用打开。电控系统通过对三位四通电磁阀与电磁截止阀的控制实现对液压系统的控制。主油泵侧加装手动泵回路,用于应对主油泵发生故障时系统的正常运行,提高系统的安全性能。

图4 装备车实物图
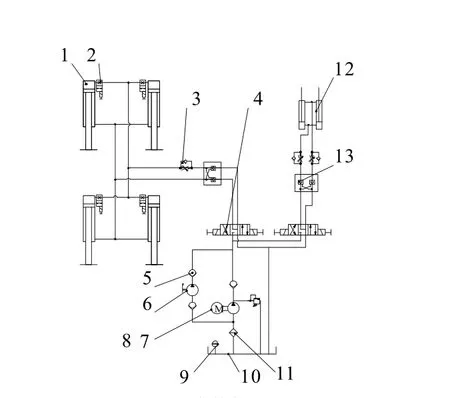
图5 液控原理图
5 远程遥控的电控系统设计
为满足专用车远程操作以及可视化作业的需要,在液压系统控制中加入远程遥控控制电路。其工作原理如图6所示。电控系统主要由油泵控制模块,支腿控制模块、尾门控制模块以及遥控信号接收模块组成。控制电路由车辆低压电池供电(24 V),通过遥控器面板按钮实现各功能回路的选择,各功能模块中分别加装保险丝用于单独模块的保护,也使电控系统故障排除更为方便。支腿控制模块与尾门控制模块中各控制回路加入二极管实现稳压功能,提高电子元件的使用寿命。
6 整车稳定性计算
以前桥中心点在地平面投影为坐标原点,以车尾为X轴正向,车身右侧为Y轴正向,车高为Z轴正向,建立坐标系如图7所示。
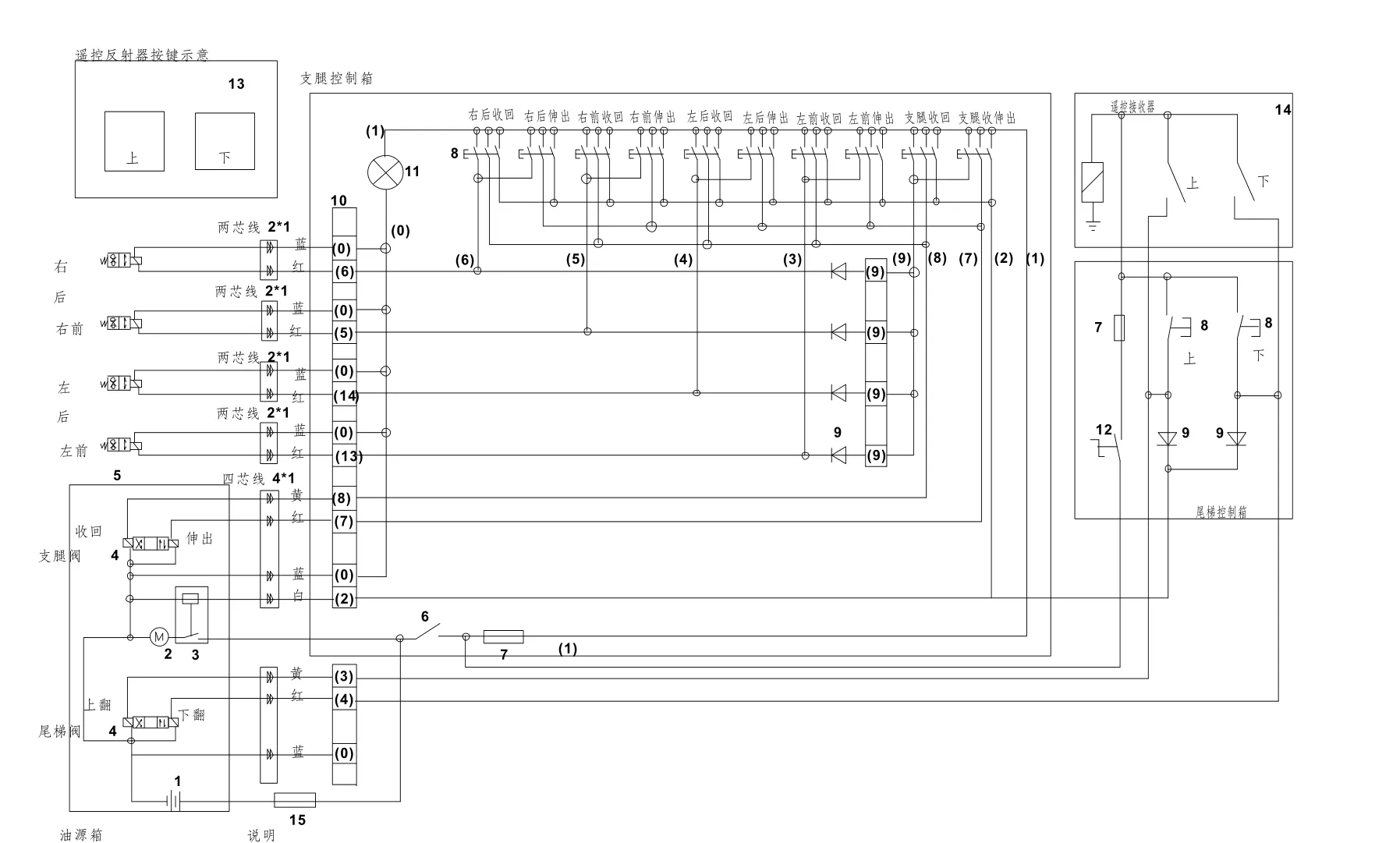
图6 电控原理图
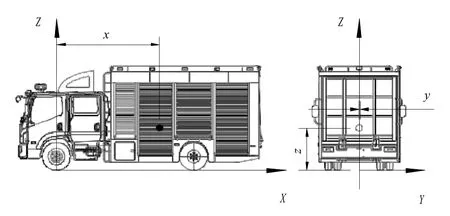
图7 装备车质心坐标系图
6.1 整备质量计算
根据整备质量计算公式,计算如下:
式中,M为整备质量,kg;Mi为各部件质量,kg。
6.2 整车质心计算
整车质心计算公式如下:

式中,X、Y、Z为整车质心方向位置;Xi、Yi、Zi为各部件质心方向的位置。
6.3 整车前后桥轴荷计算公式

式中,X为整车质心距前桥距离;L为整车轴距;M前、M后分别为整车前、后桥轴荷,kg。
6.4 车辆横向稳定性计算
车辆横向稳定性计算公式如下:
式中,B为车辆后轮距;z为质心距地面高度;φ为地面附着系数;Ly为质心偏离中心线距离。
6.5 车辆纵向稳定性计算
车辆纵向稳定性计算公式如下:
式中,L后为整车质心到后桥距离。
6.6 计算表制作
如表3所示,在主工作表的表头上依次设置“质量”/“X”/“Y”/“Z”项,该4项为数据输入;再设置另3项数据输出,即“M*X”/“M*Y”/“M*Z”。应用Excel表格的函数计算功能,可以通过前4项计算出后3项的输出数据,后3项输出数据的关系分别为“质量”与“X”/“Y”/“Z”这3个方向距离的乘积。另设置主工作表连接于车辆总质量、质心位置、轴荷分配的参数表(见图8右侧)此表中除轴距L即轮距B需要输入外,其余参数均为图2左侧表输出参数,是车辆设计中需要的几个基本参数。
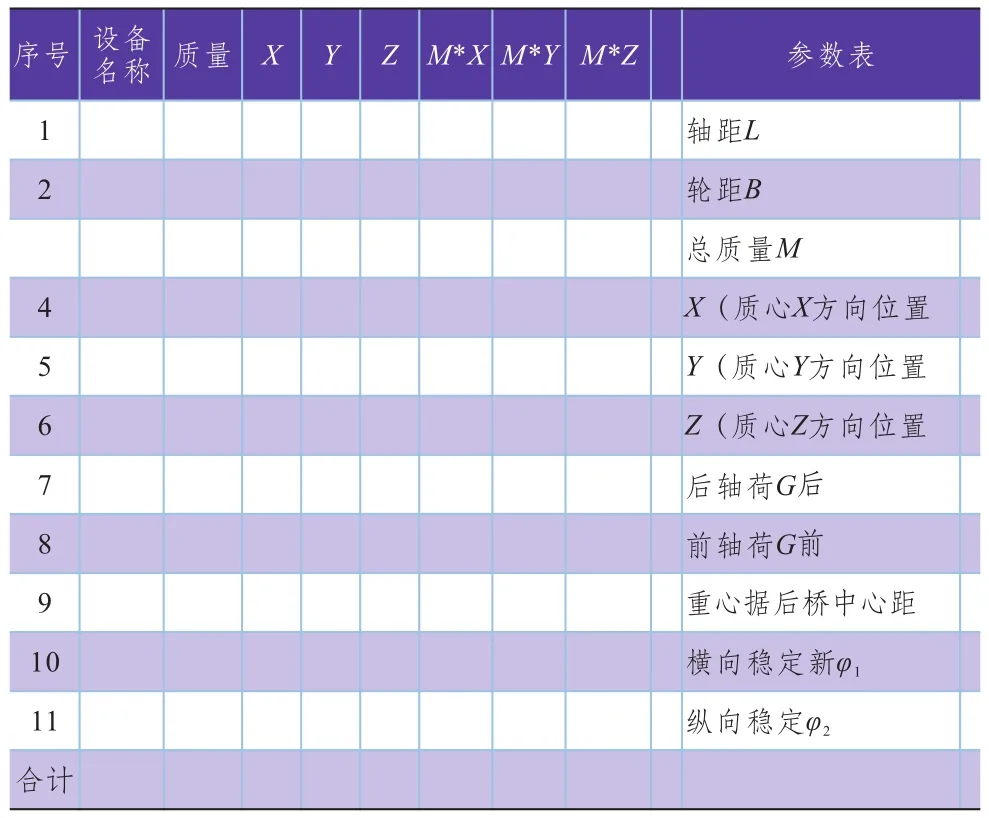
表3 车辆质心计算函数EXCEL表
应用Excel表格的函数计算功能,该输出的数据的计算公式为:
“总质量M”=∑“质量”
“X(质心X方向位置)”=(∑“M*X”)/“总质量M”
“Y(质心Y方向位置)”=(∑“M*Y”)/“总质量M”
“Z(质心Y方向位置)”=(∑“M*Z”)/“总质量M”
“后轴载荷G后”=(“总质量M”*“X(质心X方向位置)”)/“轴距L”
“前轴载荷G前”=“总质量M”-“后轴载荷G后”
“质心距后桥中心距L后”=“轴距L”-“X(质心X方向位置)”
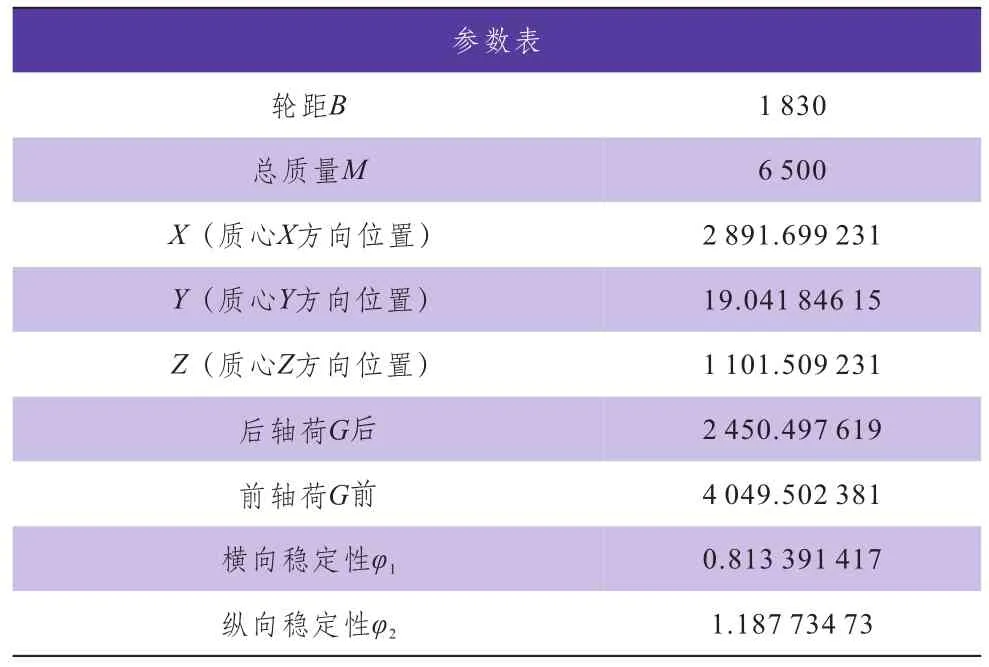
表4 装备车(整备状态)轴何分配与质心位置计算结果表
“横向稳定性系数φ1”=(“轮距B”/2-“Y(质心Y方向位置)”)/ “Z(质心Z方向位置)”
“纵向稳定性系数φ2”=“质心距后桥中心距L后”/“Z(质心Z方向位置)”
当把各部件的质量、位置参数输入到图2的计算表内的“质量”/“X”/“Y”/“Z”列表之中,并将轴距、轮距输入到右侧参数表中的”轴距L”/“轮距B”之后,输出结果则会立即在输出列表中显示。
将样车实测参数输入表格,显示结果如表4、5所示。数模坐标系内各功能组件质心位置计算结果如表5。

表5 装备车各功能组件质心位置表
根据国标GB 7258-2017《机动车运行安全技术条件》中关于车辆纵向与横向稳定性的要求,结合表3计算结果可知装备车整备状态下纵向稳定性为1.19,满足纵向稳定性不小于0.7的要求,横向稳定性0.81,满足横向稳定性不小于0.5的要求,故该专用车辆设计符合要求。
7 结语
该运输履带式消防机器人装备车经消防部门的列装使用,各结构和部件性能稳定,操作便捷可靠。该类型专用车辆是消防部门和厂矿企业进行机器人运输的得力助手,并为消防机器人灭火,消杀等作业以及相关维护提供有力保障。
该装备车已经申报发明专利(专利号:ZL 2017 1 0192284.2)。
