基于粒子群优化的混合动力汽车多目标能量管理策略
2020-07-29耿文冉楼狄明
耿文冉,楼狄明,张 彤
(1. 同济大学汽车学院,上海201804;2. 科力远混合动力技术有限公司,上海201501)
混合动力汽车能量管理策略优化的主要目标是降低整车能耗;对于有些情况,希望将电池电量控制在一定的目标值附近。例如,按照国家标准《轻型混合动力电动汽车能量消耗量试验方法》(GB/T 19753—2013)进行能耗试验时,不可外接充电式混合动力汽车在一个循环工况结束时消耗的电能占消耗燃料能量的比例小于5%时试验有效。为了进一步避免将电耗转化为油耗造成的误差,一般希望将这个比例控制在1%以内。因此,降低整车能耗和控制电池电量成为混合动力汽车能量管理的两个目标。
多目标优化问题的求解方法有多种,其中,粒子群优化(PSO)算法简单,易于实现,具有高效的搜索能力,且通用性较好,适合处理多种类型的目标函数和约束[1-2]。文献[3]提出一种内外层嵌套的双层多目标粒子群算法(DL-MOPSO),对充放电等效因子和功率分配方式同时进行寻优。文献[4]利用PSO离线优化特定工况下的等效因子和发动机起动车速,建立了基于等效因子优化的等效燃油消耗最少策略(ECMS)。文献[5]采用线性权重PSO 离线优化多个工况片段的等效因子,再根据实际工况选取最优值,得到瞬时最优能量分配方式。
本文的研究对象为新型多模功率分流式混合动力汽车,它在节能方面具有显著优势[6-9],但多种工作模式也为能量管理策略带来了挑战。不同于文献[3-5]所研究的问题,多模功率分流式混合动力汽车的能量管理策略需要对工作模式和工作点同时进行优化。因此,本文提出了考虑模式切换的ECMS 能量管理策略,同时完成对以上两个方面的优化。此外,通过文献调研发现,等效因子是ECMS的一个重要参数,不同的取值决定了发动机和电池的能量分配不同,导致整车能耗和电池电耗不同[10-12]。因此,可通过优化等效因子进一步实现对电池电量的控制目标。
为了实现降低整车能耗和控制电池电量的双重目标,本文将PSO 与考虑模式切换的ECMS 相结合,提出了基于PSO+ECMS 的能量管理策略。该策略采用考虑模式切换的ECMS 对工作模式、功率分配和工作点进行优化,再用PSO方法根据电池荷电状态(SOC)控制目标优化等效因子。
1 功率分流式混合动力系统
本文所研究的功率分流式混合动力系统又称为CHS(corun hybrid system),属于复合功率分流系统,目前用于乘用车的有 CHS1800[8]和 CHS2800[13]两个平台。CHS2800 在CHS1800 基础上增加了两个离合器,纯电动工作模式由1 种增加为3 种,混动工作模式由2种增加为6种。本文以CHS2800为研究对象,其结构如图1所示。图1中,电机E1与行星排1 的太阳轮相连,电机E2 与行星排2 的太阳轮相连,发动机通过离合器C0或C1接入系统,动力由行星排1的齿圈输出。其中,离合器C0位于发动机与第1 行星架之间,离合器C1 位于发动机与第2 太阳轮之间。B1、B2为制动器。
对CHS2800进行运动学分析,可得到各运动部件的转速和角加速度关系。设:第1行星架与第2齿圈(简称C1R2轴)的转速为ωPC;第1齿圈与第2行星架(简称C2R1轴)的转速为ωR。行星轮系转速的关系如下:

式(1)、(2)中:ωS1为太阳轮S1的转速,rad·s-1;ωS2为太阳轮S2的转速,rad·s-1;i01为行星排1的传动比;i02为行星排2的传动比。

图1 CHS2800混合动力系统结构Fig.1 Hybrid system structure of CHS2800
对行星轮系进行动力学分析,可得

忽略行星轮系内部功率损耗,由双行星轮系功率平衡条件可得

式(3)、(4)中:TS1为太阳轮S1 的转矩,N·m;TS2为太阳轮S2 的转矩,N·m;TPC为C1R2 的轴转矩,N·m;TR为C2R1的轴转矩,N·m。
CHS2800 的部分工作模式是为了提高整车动力性所设置,而在能量管理策略研究中,更加关注与整车经济性相关的模式,主要包括2 种纯电动模式EV2 和 EV3,2 种混合动力模式 HEV2 和 HEV4,如图2、3所示。
图 2 和图 3 中,“■”、“□”分别表示离合器或制动器处于结合、打开状态,杠杆与各纵轴交点处“●”到横轴的距离表示此轴转速的大小。纯电动模式的输出转矩如式(5)所示,混合动力模式的输出转矩如式(6)所示。
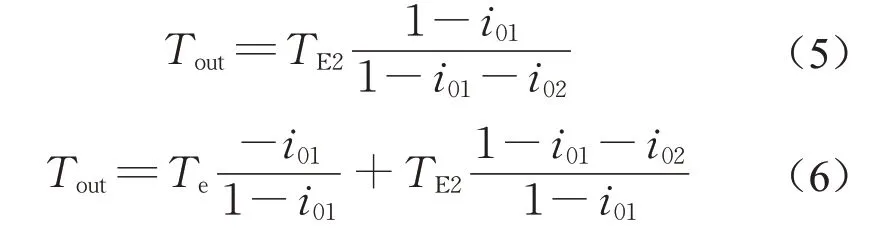
式(5)、(6)中:Tout为CHS2800 的输出转矩,N·m;TE2为电机 E2 转矩,N·m;Te为发动机输出转矩,N·m。

图2 CHS2800的两种纯电动模式Fig.2 Two pure electric modes of CHS2800
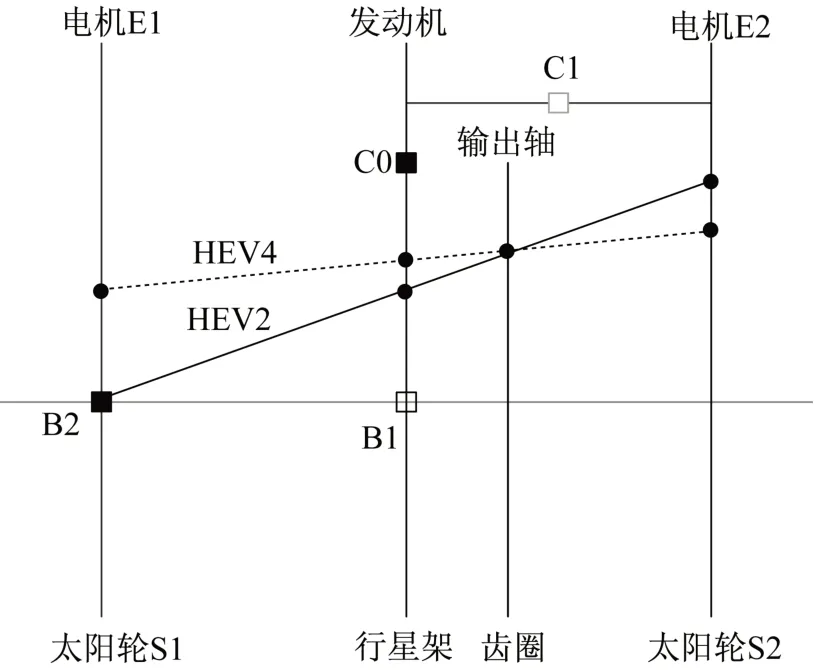
图3 CHS2800的两种混动模式Fig.3 Two hybrid modes of CHS2800
EV2 模式制动器 B2 闭合,电机 E1 停机,E2 工作,输出转矩由电机E2 提供。EV3 模式制动器B1和B2 均打开,两台电机的转速可连续调节。从图4可知,当车速在45 km·h-1以下时,EV3 模式的最大输出转矩低于EV2 模式。这是因为EV2 和EV3 模式S1轴的转矩分别由制动器B2 和电机E1提供,而E1 的最大转矩小于B2 的最大转矩。当车速在45 km·h-1以上时,EV3 模式与EV2 模式的最大输出转矩相等,且EV3模式的最高车速高于EV2模式。
当车辆处于混合动力工作模式时,若电机E1转速较低,为了避免电机工作在低效率区而造成较大的功率损耗,可将制动器B2 闭合,使系统工作在HEV2模式。此时,系统具有固定的传动比,发动机与电机E2的转速范围限制了输出轴的转速;系统输出转矩由发动机和电机E2提供,可通过调节二者的转矩分配来降低整车能耗。HEV4 模式离合器C0闭合,发动机和2台电机同时工作,输出转矩由三者共同提供。该模式发动机与车轮解耦,发动机工作点可在其全工况范围内优化。如图4 所示,由于电机E1 加入工作,HEV4 模式的最大输出转矩高于HEV2模式,并且工作车速范围更大。
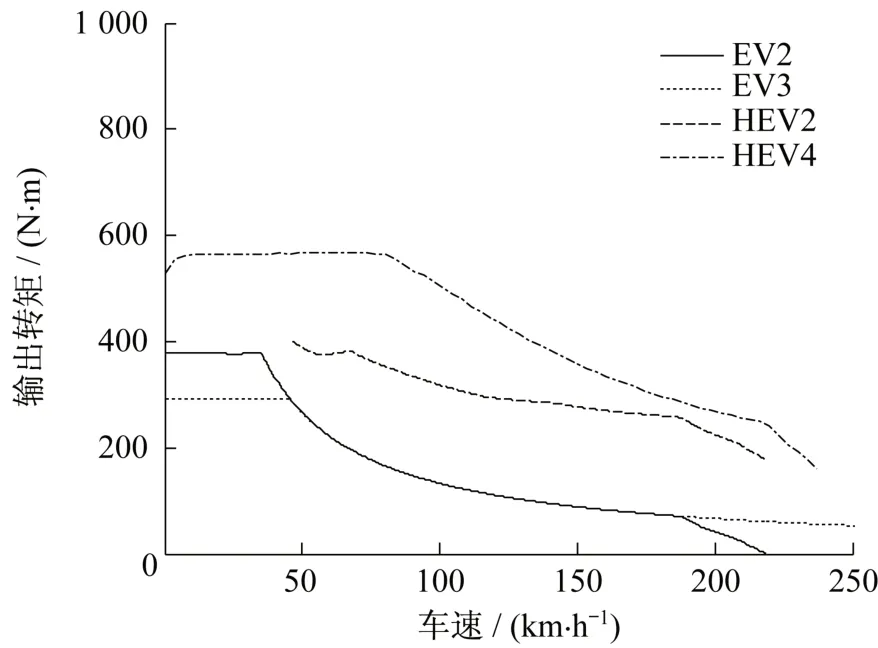
图4 4种工作模式输出转矩Fig.4 Output torque of four operation modes
2 仿真模型建立及校验
仿真是研究混合动力汽车能量管理策略的重要手段,为了保证仿真结果的可信度,建立了基于实车控制策略的联合仿真模型,其中控制模型在Matlab/Simulink中搭建,物理模型在LMS Amesim中搭建,整车及动力部件参数如表1所示。

表1 整车及动力部件参数Tab.1 Vehicle and power component parameters
2.1 模型建立
研究混合动力汽车能量管理策略时,重点关注主要动力部件的稳态性能,发动机和电机采用基于试验数据的建模方法。
发动机的瞬时油耗为

电机的功率为

式中:PEM为电机的功率,kW;TEM为当前电机转矩,N·m;nEM为当前电机转速,r·min-1;ηmot、ηgen分别为电机作为电动机、发电机时的效率。
动力电池采用等效电路模型,该模型主要用于研究电池在带负载时的动态响应,适用于混合动力汽车和纯电动汽车的能量管理研究。
式(9)、(10)中:C为电池 SOC;UOC为电池开路电压,V;PB为电池功率,W;Ib为电池电流,A;Ri为电池内阻,Ω;Qnorm为电池额定容量,A·s。
2.2 模型校验
采用车辆在底盘测功机上试验所得的数据对仿真模型进行校验。试验车辆为搭载CHS2800 的混合动力汽车,主要参数见表1。试验工况为新欧洲循环工况(NEDC),分别以纯电动模式、混合动力模式进行试验,采集整车及关键部件的状态信息。
表2给出了纯电动试验与仿真结果的对比。从表2中可以看出,与整车经济性相关的电耗、纯电动续驶里程的仿真误差均在1%以内。图5 给出了车速、电池功率的对比情况。从图5中可以看出,仿真结果能够与试验结果较好地吻合。

表2 纯电动试验与仿真结果对比Tab.2 Comparison of experiment and simulation results of pure electric modes
表3 给出了混合动力试验与仿真结果的对比。从表3中可以看出,与整车经济性相关的指标电耗、油耗的仿真误差均在1%以内。图6给出了车速、发动机转速、发动机转矩的对比情况。从图6 中可以看出,仿真结果能够与试验结果较好地吻合。

表3 混合动力试验与仿真结果对比Tab.3 Comparison of experiment and simulation results of hybrid modes

图5 纯电动模式试验与仿真结果Fig.5 Experiment and simulation results of pure electric modes

图6 混合动力模式试验与仿真结果Fig.6 Experiment and simulation results of hybrid modes
图7 和图8 分别为纯电动模式和混合动力模式的车速误差分析,给出了仿真车速对于试验车速的绝对误差和相对误差。误差为正值时一般处于驱动状态,误差为负值时多为制动状态。从图7和图8中可以看出,驱动状态的车速绝对误差一般在2 km·h-1以内,相对误差一般在5%以内。车辆起步时由于车速较低,从而相对误差数值较大。车辆制动时相对误差和绝对误差较大,这是由于实车制动转矩包含部分机械制动转矩,而仿真无法得知准确的数值,从而造成车速与实际值相差较大。

图7 纯电动模式车速误差分析Fig.7 Error analysis of vehicle speed for pure electric modes

图8 混合动力动模式车速误差分析Fig.8 Error analysis of vehicle speed for hybrid modes
模型校验结果表明,所建立的仿真模型能够较准确地模拟车辆的实际运行情况。
3 能量管理策略
为了同时实现降低整车能耗和控制电池电量的双重目标,提出了基于PSO+ECMS 的多目标能量管理策略。该策略采用双层结构,内层采用考虑模式切换的ECMS 实现降低整车能耗的目标;外层采用PSO对等效因子进行迭代优化,实现电池电量的控制目标。
3.1 考虑模式切换的ECMS能量管理策略
目前CHS 混合动力汽车的能量管理策略采用基于规则的方法确定工作模式,再根据ECMS 确定最优工作点。这种策略将工作模式与工作点优化分割开来,通过实车调试不断地修改和验证模式切换规则,工作量较大,且无法保证得到最佳经济性。
为了解决以上问题,提出了考虑模式切换的ECMS 能量管理策略,该策略流程图如图9 所示。该策略将模式选择与工作点优化统一考虑,用优化算法代替了工程经验和实车调试,保证了优化效果。图9中nmode表示可选工作模式的数量,输入为工况数据,包括车速、整车需求转矩等。然后根据ECMS策略计算某工作模式每个工作点的等效油耗,选择其中等效油耗最低的工作点作为该模式的最优工作点。计算出所有可选工作模式的最优工作点,选择其中等效油耗最低的作为该工况的最优工作点,对应的工作模式为该工况的最优工作模式。
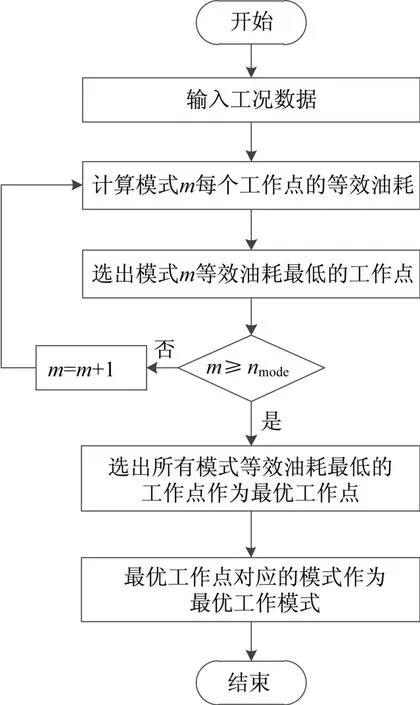
图9 考虑模式切换的ECMS策略流程图Fig.9 Flow chart of ECMS considering the switch of modes
图10~12 给出了考虑模式切换的ECMS 能量管理策略优化结果,包括工作模式和发动机工作点(转速、转矩)。图中输出转矩和输出转速分别指功率分流系统输出轴的转矩和转速。

图10 工作模式优化结果Fig.10 Optimization results of operation modes

图11 发动机转速优化结果Fig.11 Optimization results of engine speed
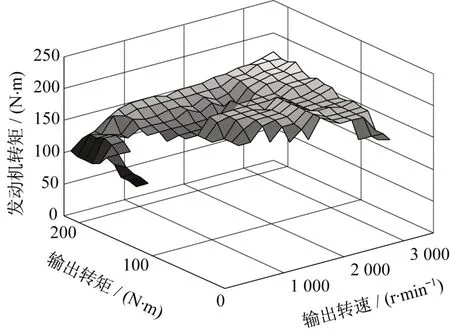
图12 发动机转矩优化结果Fig.12 Optimization results of engine torque
等效因子是ECMS 策略的关键参数,其大小决定了车辆驱动功率在发动机和电池之间的分配关系。对于考虑模式切换的ECMS 策略来说,等效因子决定了最优工作模式和最优工作点。图13 给出了工况点 A(1 500 r·min-1,20 N·m)和 B(1 500 r·min-1,200 N·m)的工作模式Mode、发动机功率Pe、发动机转速ne、发动机转矩Te随等效因子的变化情况。从图13 中可以看出,随着等效因子的增大,工作模式由纯电动变为混动,发动机功率逐渐增大。对比A、B 两点的优化结果,B 点所需的系统输出功率Pout大于A点,因此,B点在等效因子大于2.5时进入混动模式,而A 点则在等效因子大于3.0 时才进入混动模式。并且,在相同的工作模式(等效因子为4.5~5.0)时,B点的发动机功率高于A点。
由以上分析可知,等效因子对控制策略的制定有直接影响;并且,不同工况下控制策略随等效因子的变化情况不同。
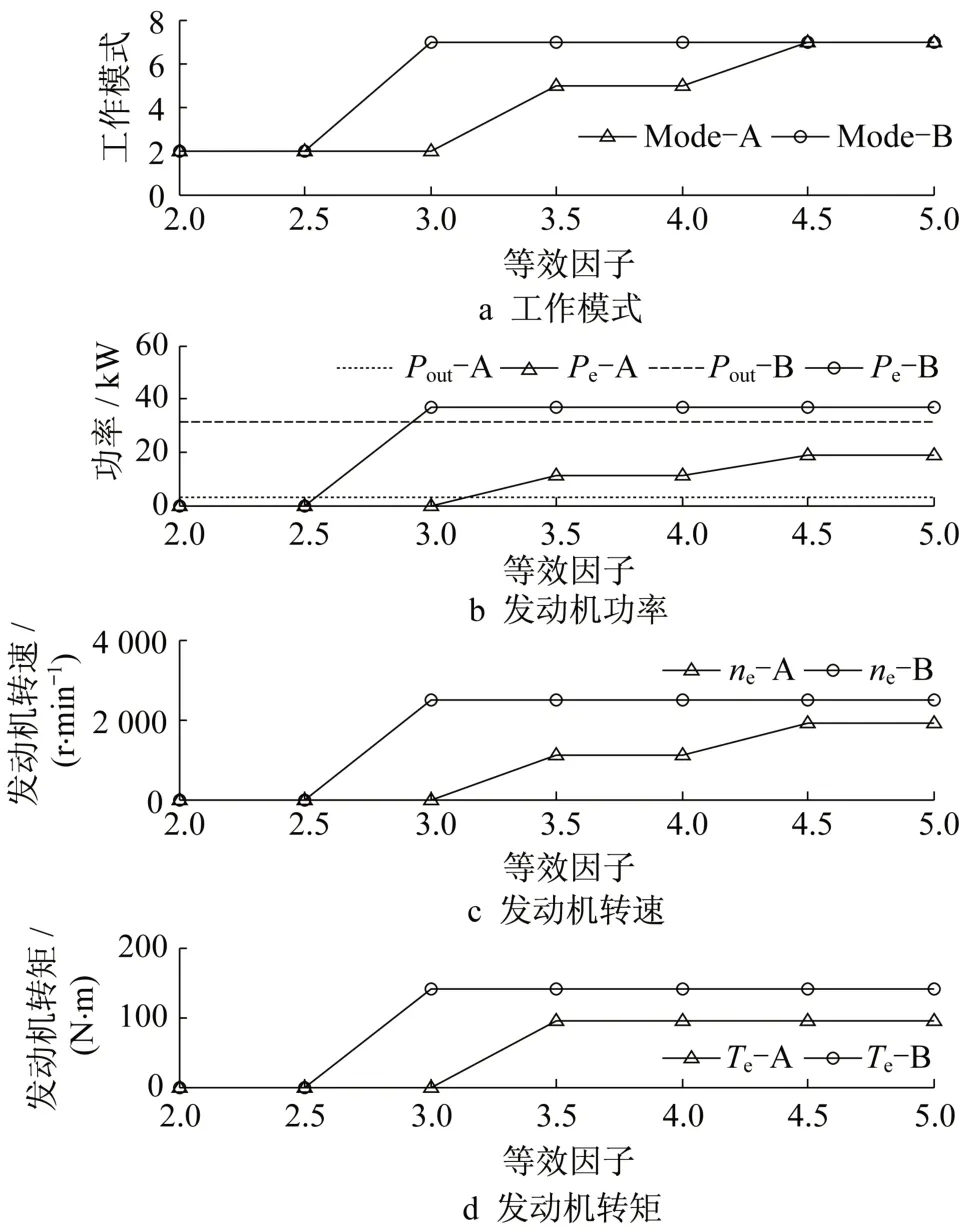
图13 控制策略随等效因子的变化Fig.13 Variation of control strategies changing with equivalence factor
3.2 基于粒子群算法的等效因子优化
如3.1 节所示,不同等效因子对应的控制策略不同,当一段工况运行结束时,所得到的整车能耗和电池SOC也不同。为了保持电池的健康状态,需要将工况结束时的SOC 控制在一个目标值附近。因此,有必要对等效因子进行优化,找到满足电池SOC控制要求的值。
为了实现降低整车能耗和控制SOC的目标,提出了将粒子群优化(PSO)与考虑模式切换的ECMS相结合的能量管理策略,简称PSO+ECMS,流程图如图14所示。其中,ECMS 用于计算某等效因子对应的最优工作模式、功率分配和工作点,PSO用于搜索满足SOC控制目标的等效因子。
粒子群算法是一种基于进化的算法,它采用随机解对粒子群进行初始化,通过计算种群与个体的适应度函数,不断更新粒子的位置和速度实现种群的进化。该算法简单,易于实现,且具有高效的搜索能力,有利于得到多目标意义下的最优解[14],在混合动力汽车的能量管理策略优化中得到了广泛应用[15-17]。

图14 PSO+ECMS策略流程图Fig.14 Flow chart of PSO+ECMS strategy
基于PSO+ECMS能量管理策略实现步骤如下:
(1)输入工况数据,包括车速与需求转矩。
(2)粒子位置和速度初始化。PSO 的任务是寻找最优等效因子,因此,粒子的位置代表等效因子的取值,粒子群的规模为nparticle。采用随机数对粒子的位置和速度进行初始化。
(3)计算每个工作点的等效油耗。对于一个工况点,有多种工作模式可选,并且每种工作模式下均有多个工作点可满足控制要求。采用ECMS 策略,计算所有工作模式下每个工作点的等效油耗,选择最低等效油耗所对应的工作模式和工作点作为优化结果。计算过程中等效因子作为粒子的位置,由PSO算法输入。
(4)计算每个粒子的适应度函数。将步骤(3)得到的工作模式和工作点输入仿真模型,进行整车经济性仿真,提取仿真结束时的SOC 值,结合SOC 目标值,计算适应度值。

式中:Cf为仿真结束时的 SOC 值;Ctarget为 SOC 目标值;abs()为求取绝对值的公式。
(6)重复步骤(3)~(5),计算当前迭代所有粒子的适应度值,并更新粒子个体最优值。
(8)判断是否满足结束条件。结束条件包括两个:达到最大迭代次数或工况结束时SOC与目标值的偏差在允许范围内。
(9)更新粒子的位置和速度。若步骤(8)中的结束条件未满足,则按照式(12)、(13)更新粒子的速度和位置,进行下一次迭代。粒子的进化轨迹如图15所示。

图15 粒子进化过程Fig.15 Evolution process of a particle

当惯性因子较大时,有利于跳出局部极值,便于全局搜索;当惯性因子较小时,可对当前的搜索区域进行精确的局部搜索,有利于算法收敛。针对PSO算法容易早熟以及算法后期易在全局最优解附近振荡的现象,采用线性变化的惯性因子,按照式(14)从最大值线性减小到最小值。

(10)输出该工况的最优等效因子及对应的最优工作模式、发动机工作点。
4 仿真验证
为了验证PSO+ECMS能量管理策略在降低整车能耗和控制SOC两个方面的效果,采用全球统一轻型车测试规程(WLTC)进行仿真。WLTC 工况包括4部分,分别为低速段(T1)、中速段(T2)、高速段(T3)和超高速段(T4),如图16所示。

图16 WLTC工况路谱Fig.16 Road spectrum of WLTC
控制每个工况片段结束时SOC 与开始时保持平衡,采用PSO+ECMS 策略得到的最优工作模式和工作点进行整车经济性仿真,结果如表4 所示。表中为平均车速,vmax为最高车速,sopt为各工况的最优等效因子,Cf为各工况结束时的SOC,每个工况开始时SOC均为60%。
从表 4 可以看出,PSO+ECMS 策略可将Cf控制在目标值附近(偏差小于1%)。从T1到T4工况,平均车速和最高车速逐渐增大,驱动车辆所需的功率不断增加,最优等效因子也随之增大,表明发动机提供的功率在车辆所需功率中占的比例越来越大,整车油耗相应地增加。

表4 WLTC工况仿真结果Tab.4 Simulation results of WLTC
为了对比说明PSO+ECMS 能量管理策略的优化效果,采用基于规则与等效燃油消耗最少的能量管理策略(RB+ECMS)进行了WLTC 工况整车经济性仿真,所得Cf为60.12%,等效油耗为7.07 L·(100 km)-1。PSO+ECMS 的等效油耗比RB+ECMS 的结果降低了2.7%。说明PSO+ECMS 策略相比于RB+ECMS策略具有更好的整车经济性。
图 17 所示为 WLTC 工况采用 PSO+ECMS 和RB+ECMS 两种策略的车速仿真结果,可以看出,这两种策略均可满足整车动力需求,仿真车速能够较好地跟踪目标车速。

图17 WLTC工况车速仿真结果Fig.17 Simulation results of vehicle speed for WLTC
图18所示为WLTC工况SOC仿真结果。由图18 可 知 ,PSO+ECMS 与 RB+ECMS 均 可 实 现SOC平衡,将工况结束时的SOC控制在允许的偏差范围内。但是两种策略的实现方法不同,PSO+ECMS通过PSO算法迭代优化等效因子实现;RB+ECMS 则通过调整工作模式切换规则实现,需要工程师反复调试和验证。此外,在1 237 s之前的工况,采用 PSO+ECMS 和 RB+ECMS 策略时,电池SOC 分别升高了23.8% 和2.7%,说明PSO+ECMS允许电池在中低速工况储备更多电能。这样做的好处是,当车速较高、整车需求功率较低时,允许发动机停机。例如,在1 237~1 321 s 之间的工况,车速在73~93 km·h-1之间,但是整车平均需求功率约为8 kW,若发动机工作,则工作点容易出现在低效率区。

图18 WLTC工况SOC仿真结果Fig.18 Simulation results of SOC for WLTC
图19和图20分别为WLTC工况发动机工作点的分布和统计结果。从图19 可以看出,PSO+ECMS 策略的发动机工作点更多地分布在高效率区,比油耗低于250 g·(kW·h)-1的工作点分布比例为65.37%,远高于RB+ECMS 策略的24.88%,如图20 所示。在1 237~1 321 s 之间的工况,采用PSO+ECMS 策略时发动机停机,RB+ECMS 策略时发动机的转速在1 000~1 900 r·min-1之间,转矩在30~90 N·m 之间,从图19 可以看出,该区域发动机工作点的比油耗较高,效率较低。

图19 WLTC工况发动机工作点分布Fig.19 Distribution of engine operating points for WLTC

图20 WLTC工况发动机工作点统计Fig.20 Statistics of engine operating points for WLTC
以T3 工况为例,说明PSO+ECMS 的寻优过程。图21~23分别为T3工况等效因子、Cf和油耗的迭代过程。P1~P5分别代表粒子群的5个粒子,Gbest代表全局最优解,经过16 次迭代算法达到收敛条件。
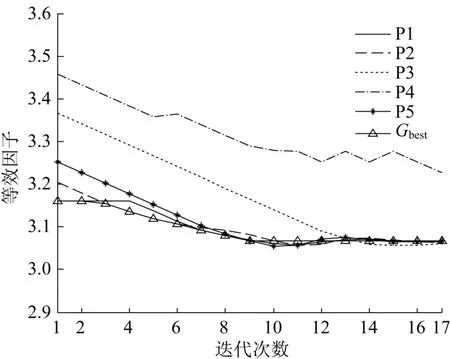
图21 T3工况等效因子迭代过程Fig.21 Iteration of equivalence factor for T3

图22 T3工况Cf迭代过程Fig.22 Iteration of Cf for T3
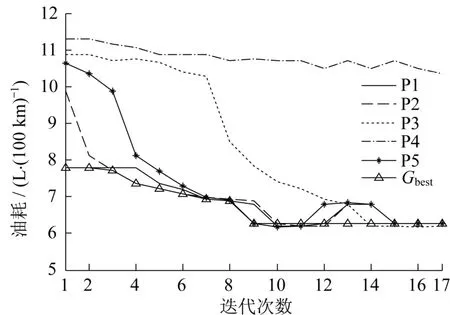
图23 T3工况油耗迭代过程Fig.23 Iteration of fuel consumption for T3
5 结论
(1)基于实车控制策略,建立了功率分流式混合动力汽车仿真模型,并通过实车试验数据验证了模型的准确性。
(2)提出了考虑模式切换的ECMS 能量管理策略,通过优化算法得到最优工作模式与工作点,不再依赖于工程经验和标定试验来选择工作模式。
(3)提出了将粒子群算法与ECMS 相结合的能量管理策略,可实现降低整车能量消耗和控制电池SOC的双重目标。