航天器故障诊断与容错控制技术研究综述
2020-07-27李利亮王振华
沈 毅,李利亮,2,王振华
(1. 哈尔滨工业大学航天学院,哈尔滨 150001;2. 上海航天控制技术研究所,上海 201109)
0 引 言
航天器长期运行在恶劣的空间环境中,难免会出现故障。故障诊断与容错控制技术可以增强航天器的可靠性、降低维护成本、提高航天器的寿命,对于保障航天器的安全稳定运行具有重要意义。在过去的几十年中,航天器故障诊断与容错控制技术得到了国内外研究者的重视。除了故障诊断与容错控制技术,文献中还出现了故障预测与健康管理(Prognostic and health management,PHM)和飞行器综合健康管理(Integrated vehicle health management,IVHM)等相关技术概念。故障预测与健康管理是美国在联合攻击机项目研究中提出的技术理念,其初衷是利用人工智能技术来模拟真实系统的正常运行和异常状况。后来,故障预测与健康管理逐渐发展成为一个范畴很大的技术领域,所采用的技术手段也不限于人工智能技术。飞行器综合健康管理是美国航空航天局(National Aeronautics and Space Administration,NASA)提出的技术概念,旨在为航天器提供实时、全寿命周期的健康信息并进行故障自诊断和自恢复。飞行器综合健康管理的研究主要包括以下几个方面:体系结构、传感器技术、诊断算法、测试平台与原型机开发等。其中,体系结构是决定综合健康管理系统优劣的根本,传感器是综合健康管理系统的硬件基础,诊断算法是综合健康管理系统的核心技术,测试平台与原型机开发则是技术验证的重要步骤。无论是故障预测与健康管理系统,还是飞行器综合健康管理系统,它们的核心都是故障诊断与容错控制技术。因此,本文以航天器的故障诊断与容错控制技术为主线综述国内外的研究进展,并介绍一些国外相关技术项目的开展情况,最后对航天器的故障诊断与容错控制技术进行展望。
1 航天器故障诊断技术
现有的故障诊断技术可大致分为基于模型的方法、基于数据的方法和基于知识的方法三类[1-3]。这三种方法各有利弊,表1中对这三种故障诊断方法的优缺点进行了简单的总结。本文在介绍航天器故障诊断方法时也将从这三个方面展开。
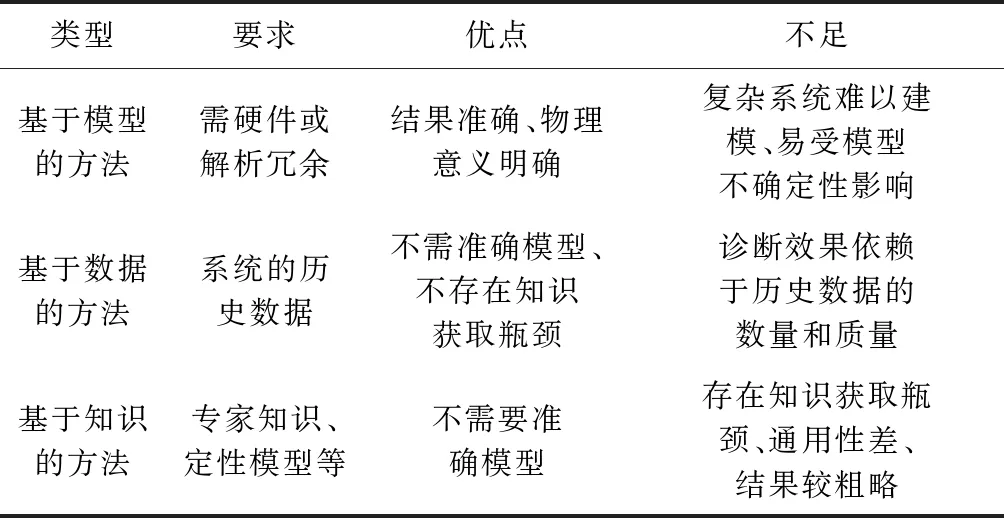
表1 不同故障诊断方法的对比Table 1 Comparison of different fault diagnosis methods
1.1 基于模型的航天器故障诊断
基于模型的方法通常是指基于定量模型的方法。在这方面,大部分文献中研究的是姿态系统确定与控制的故障诊断方法[4-5]。其原因一方面是由于航天器控制系统是航天器中最重要的分系统、也是最容易发生故障的分系统[6];另一方面是由于姿态控制系统的数学模型比较容易获得,且姿态控制系统中存在较多可以利用的硬件冗余和解析冗余。
美国的研究者在20世纪70年代就开始关注基于模型的故障诊断,对基于敏感器冗余的故障诊断方法的研究居多[7]。近十几年又有一些相关研究。例如文献[8]研究了基于模型的推力器故障检测与分离方法,并在X-38、Mini AERCam和MIT SPHERES等飞行器系统上进行了技术验证,文献[9]将基于模型的方法用于星际钻探系统的自主健康监测。
基于模型的航天器故障诊断得到了国内学者们的广泛关注[10]。文献[11]针对由红外地平仪、太阳敏感器和陀螺仪构成的卫星姿态确定系统,提出了一种基于简化滤波器的故障诊断方法。该方法利用姿态确定系统中的卡尔曼滤波器即可进行故障诊断,但是需要三套红外地平仪和太阳敏感器才能实现故障分离,对于系统的硬件冗余要求较高。文献[12]针对四斜装陀螺只能检测故障不能分离故障的问题,提出了一种基于四元数求导的陀螺故障诊断方法,但是由于测量噪声会对四元数的导数估计造成较大的影响,所以文献[12]采用了卫星姿态动力学方程对四元数的导数估计进行了滤波处理。最近,文献[13]将奉献观测器思想应用于陀螺和星敏感器构成的姿态确定系统,提出了一种既能诊断陀螺故障又能诊断星敏感器故障的方法。
欧洲也有学者在基于模型的航天器故障诊断方面进行了研究。例如文献[14]建立了Microscope卫星的数学模型,基于观测器设计了卫星电推进器的故障诊断策略,文献[15]针对火星采样返回任务的轨道推进器故障诊断问题,基于鲁棒极点配置方法设计残差生成器用于故障检测,并通过相关性分析进行故障分离。
建模误差、参数不确定性、未知扰动等不确定性因素是困扰基于模型的故障诊断方法的主要问题之一。航天器质量和惯量的时变特性和不确定性可能会影响基于姿态动力学模型的故障诊断方法的实用效果。与姿态动力学相比,姿态运动学模型是比较准确的。因此,在基于模型的航天器故障诊断研究中,应该尽量利用姿态运动学模型进行故障诊断。
基于模型的故障诊断可以分为残差生成和残差评价两个环节,两者都很关键。目前文献中的大部分结果都是关于残差生成的,在残差评价方面的研究比较少见。最近,有研究者将集员估计方法用于残差评价,得到了系统有效的自主残差评价方法[16],但是在航天器方面的应用还有待进一步研究。
1.2 基于数据的航天器故障诊断
基于数据的故障诊断方法旨在从数据中提取出隐含的有用信息进行故障诊断。根据诊断原理的不同可以将基于数据的方法分为基于统计分析的方法、基于信号处理的方法和基于人工智能的方法。
1.2.1基于统计分析的方法
基于统计分析的故障诊断方法通过对数据进行分析,提取统计特征量,然后判断特征量是否超过设定的阈值进行故障诊断。主成分分析是目前应用最为成熟的多元统计分析方法之一。文献[17]利用主成分分析法研究了自旋稳定卫星姿态传感器的故障诊断。自旋稳定卫星的太阳敏感器、北红外地平仪和南红外地平仪可以提供冗余测量信息,文献[17]将这种冗余关系作为故障诊断的基础,通过监测SPE统计量进行故障的检测和故障定位。文献[18]针对三正交一斜装陀螺组件,采用独立成分分析法提出了一种卫星陀螺故障检测、辨识与重构方法。基于统计分析的方法在航天器故障诊断中的应用只是初步的探索,还有许多问题需要深入研究,例如如何处理数据的非线性和动态特性等问题。
1.2.2基于信号处理的方法
基于信号处理的故障诊断方法的基本思想是受故障影响的测量信号与正常运行时的测量信号具有不同的特征,如果能够提取与故障相关的特征,即可判断出系统中发生了故障。基于信号处理的方法通常被用于检测传感器的故障。其主要原理是通过信号处理方法检测信号中的奇异点进行故障检测。文献[19-20]研究了小波方法在陀螺故障诊断中的应用。考虑到信号处理方法的计算量相对较大,文献[19]将基于模型的方法与基于信号处理的方法相结合,提出了一种混合故障诊断方法。首先基于硬件冗余进行故障检测,在检测到故障后启用基于信号处理的方法。这样既可以快速有效地诊断故障,又能降低算法的运算量。受文献[19-20]的启发,文献[21]研究了基于等价关系法和经验模态分解的陀螺故障诊断方法。基于信号处理的故障诊断方法的优点在于其无需系统的模型即可检测传感器的故障,与基于模型的方法相比,在传感器故障诊断方面有更好的故障分离能力;但是其缺点是只能检测出突变特征比较明显的故障,对缓变故障可能会漏报。
1.2.3人工智能方法
基于人工智能技术进行故障诊断的基本思想是从历史数据中学习系统的行为模式。基于人工智能方法进行故障诊断的主要研究思路可以大致分为两种:一种是基于模型近似的诊断思想,另一种是基于模式识别的诊断思想。
基于模型近似的诊断方法主要是从正常运行的历史数据中学习无故障系统的模型,作为故障检测的依据。例如,文献[22]用相对向量机学习历史运行数据的边界,然后生成用于故障检测的自适应阈值,文献[23]对具有周期特征的遥测数据进行自回归滑动平均(ARMA)建模,然后通过比较时间序列的预测值和实测值的偏差进行航天器异常检测。这些方法需要收集大量正常运行的数据,以充分描述正常系统的特征。这些数据要么从飞行测试中得到,要么由仿真计算得到。如果用仿真数据,则仿真模型必须要足够准确。
基于模式识别的故障诊断方法主要是使用历史数据训练分类器进行故障诊断。模式识别方法可以分为有监督学习算法和无监督训练算法。由于航天器的故障数据有限,通常不足以训练有监督学习算法,所以很多方法用的是无监督监测方法。文献[24]中采用航天器发动机的飞行和试验数据训练并测试了基于最邻近聚类的软件工具Orca、基于自适应聚类的软件工具IMS、基于决策树的商用数据挖掘工具GritBot、高斯混合模型、动态贝叶斯网络和一类支持向量机等六种无监督异常监测算法。在有监督训练算法方面的研究比较少,文献[25]利用非线性支持向量机算法研究了航天器姿态确定与控制系统的健康监测,在故障诊断算法的训练过程中使用了Z轴角速度传感器故障和航天器失稳模式两种异常数据的样本,提出了一种有监督学习的故障检测方法。另外,人工智能算法也可以和其他方法联合使用。例如文献[26]将神经网络算法和基于模型的方法相结合,训练神经网络学习残差特征和故障类型的映射关系进行故障诊断。
近年来,基于深度学习理论的人工智能方法得到了广泛的关注,最近已经有研究者将这些方法引入到航天器故障诊断领域。例如,文献[27]研究了长短期记忆网络在卫星姿态控制系统故障诊断中的应用,文献[28]研究了四种深度学习技术在飞行器关键机械部件故障诊断中的应用。基于深度学习的故障诊断技术是一个比较有前景的研究方向,但是这类方法在应用于航天器故障诊断时还存在一些问题:首先,很多基于人工智能的故障诊断方法依赖于大量的历史数据,但是航天器故障诊断存在故障样本难以获取、故障源和故障征兆之间的关系难以确定等特殊性;其次,很多人工智能算法缺乏物理意义和可解释性,无法对故障的进一步分析和维修提供有效的指导;第三,深度学习方法的计算量较大,如何实现在轨实时应用也是一个需要考虑的问题。
1.3 基于知识的航天器故障诊断
基于知识的故障诊断方法中,最具代表性的方法是故障诊断专家系统和基于定性模型的方法。
故障诊断专家系统一般是基于规则的,这些规则是专家的经验总结,用来描述故障和征兆的关系。该方法的优点是知识表示简单直观,诊断推理速度快,易于编程和开发。专家系统是航天器最早的故障诊断方法之一。早在20世纪80年代,NASA就将专家系统应用于航天器故障诊断[29]。北京控制工程研究所将专家系统应用于卫星控制系统,开发了卫星控制系统实时故障诊断专家系统SCRDES[30]。虽然专家系统具有工程实用价值,但是故障诊断专家系统的通用化、可移植能力差,对于不同的诊断对象要进行具体的分析和设计,对于其工程应用造成了一定的困难。另外,由于航天器系统复杂,很难建立准确且完备的诊断规则库,专家系统存在知识获取的“瓶颈”问题,对未出现过和经验不足的故障缺乏诊断能力。近年来,有研究者利用神经网络技术处理专家系统的知识获取问题[31],一定程度上解决了知识获取的困难,但是这种方法需要事先积累不同工作状态下的历史数据,获得足够多的样本,才能保证诊断性能。
基于定性模型的方法的基本思想是利用定性模型描述被诊断对象的结构和行为,通过将定性模型和实际行为进行比较来检测故障,若检测到故障,则采用定性推理得到可能的故障原因集合。文献[32]针对火箭系统研究了基于定性模型的故障诊断方法。文献[33]中利用基于定性事件的诊断方法研究了卫星电源供电系统的故障诊断。文献[34]基于定性模型,利用冲突识别方法研究了卫星电源系统的故障源定位问题。为了提高定性方法的诊断性能,文献[35]针对航天器推进系统,提出了一种解析冗余和定性分析相结合的半定性故障诊断方法,其基本思想是利用解析冗余关系生成残差,然后通过对残差的定性分析进行故障诊断。
2 航天器容错控制技术
容错控制技术是20世纪80年代发展起来的一种提高可靠性的技术。容错控制技术可分为主动容错和被动容错两大类,其中主动容错控制需要利用故障诊断部分所提供的信息,而被动容错不依赖于故障诊断部分,主要是靠控制器自身的鲁棒性来抑制故障的影响。在航天器的容错控制中,以控制理论为基础的方法研究最多,本文简要综述与姿态控制系统相关的容错技术。
在主动容错控制方面,美国学者Boskovic等[36]研究了卫星姿态控制系统的主动容错控制,提出了一种基于自适应观测器组的容错控制策略,其基本思想是设计一组自适应观测器,通过切换的方式判断是哪个执行器发生了故障,然后通过伪逆法实现容错控制。国内学者也非常重视航天器的主动容错控制。文献[37]针对卫星姿态控制系统,研究了基于增广观测器的故障估计与容错控制方法。文献[38]针对存在冗余敏感器的卫星姿态确定系统,设计了一种基于联邦卡尔曼滤波器的容错姿态确定方法。文献[39]针对卫星敏感器故障,提出了一种故障诊断与容错控制一体化设计方法。近年来,有研究者将容错控制与控制分配结合在一起,研究容错控制分配技术。文献[40]将容错控制分配思想用于火星探测航天器的容错控制。文献[41]利用指令分配最优查表法研究了航天器控制系统的容错控制分配。指令分配最优查表法是由欧空局在研发自动转移飞行器(ATV)时提出的,但是欧空局提出的指令分配最优查表法没有考虑推力器的幅值有界问题。文献[41]对指令分配最优查表法进行了改进并将其应用于有故障航天器的推力分配。
主动容错控制方法的控制效果依赖于故障诊断结果的准确性。因此,主动容错控制所面临的主要困难之一就是故障诊断结果的不准确性。与主动容错控制不同,被动容错控制不需要利用故障诊断信息,在抵御模型偏差方面具有一定的优势。文献[42]研究了配置有四个反作用飞轮的姿态控制系统的容错控制方法。该方法虽然没有直接采用故障诊断模块,但也利用时延控制方法估计了故障引起的偏差并进行了补偿。文献[43]针对具有柔性附件的卫星姿态控制系统,采用自适应反步控制方法研究了考虑执行器故障的被动容错控制。文献[44]针对存在参数不确定性和执行机构故障的姿态控制系统,设计了一种鲁棒变增益PID容错控制方法。总体来说,现有的被动容错控制方法主要是基于Lyapunov函数的方法,通过将滑模控制、反步控制、自适应控制等理论方法引入卫星姿态控制系统来设计容错控制律。从早期的文献[42]发展到现在,控制器的推导和形式都越来越复杂。文献[45]指出,星上存储空间和处理能力等资源的有限性要求故障诊断和容错控制算法简明有效,防止过分复杂导致正常运行模式的软件可靠性下降。但是,目前的航天器被动容错控制研究中对这方面的考虑较少。
3 国内外相关技术项目的研究情况
3.1 美国的相关项目研究与应用情况
美国是航天器故障诊断与容错控制技术项目研究和应用最多的国家。在20世纪80-90年代,美国非常重视航天飞机的故障诊断,在航天器故障诊断专家系统方面进行了大量的研究。近年来,美国更倾向于发展基于模型的故障诊断方法和数据驱动的故障诊断方法。其中,NASA开发的Livingstone系统、混杂推理机(Hybrid diagnostic engine,HyDE)和归纳式监测系统(Inductive monitoring system,IMS),以及Qualtech系统公司开发的TEAMS-RT系统是比较有代表性的几个故障诊断系统。
Livingstone是NASA Ames研究中心研制的一个基于定性(离散)模型的诊断系统,它包含特定领域模型和通用推理机两个部分,使用定性推理的方式进行故障诊断。1999年,第一代Livingstone作为远程智能自主技术试验的一部分在深空一号卫星上进行了验证。在此次飞行试验中,Livingstone被用于诊断星上搭载的两个成像仪器和一个数据记录装置的一些简单故障。后来,第二代Livingstone系统Livingstone2被用于X-34飞行器主推进系统的故障诊断,在一个与实际飞行软件类似的条件下对Livingstone2进行了仿真校验。2003年,Livingstone2系统在地球观测一号卫星上进行了在轨验证,仍然是对星上搭载的成像仪和数据记录装置进行故障诊断,但是功能相比第一代Livingstone有了一定的提升。
在Livingstone的基础上,NASA的Ames研究中心继续开发了基于定性模型和定量模型的混杂推理机HyDE。HyDE首先建立部件的各种运行模式以及不同模式之间的转换模型,然后采用模块化和层次化的方式建立用于诊断的模型。HyDE的诊断推理方式是对诊断模型和测量数据进行一致性分析,生成与测量值一致的故障备选集。由于HyDE的诊断模型中采用了定量信息,其诊断结果比Livingstone2更加准确和全面。HyDE的项目应用也比Livingstone2要广泛,它被陆续应用于NASA的先进诊断和预测试验台(Advanced diagnostics and prognostics testbed,ADAPT)[46]、TacSat-3卫星[47]和FalconSAT-5卫星的故障诊断[48]。
IMS是NASA Ames研究中心开发的一个基于数据驱动技术的故障诊断系统。它采用基于距离的聚类方法对来自归档数据或仿真数据的正常数据集进行归纳学习,自动建立一个表征系统正常运行状态的聚类数据库,用于监测系统的异常行为。IMS的开发者首先利用哥伦比亚号航天飞机的归档数据对IMS进行了验证,结果表明IMS能够快速检测出故障机翼温度的异常变化,验证了IMS的有效性。此后,IMS在TacSat-3飞行器系统管理项目和Ares I-X等工程项目中得到了技术验证,并被应用于国际空间站的飞行控制室,对国际空间站姿态控制系统和热控制系统进行实时监测[49]。
TEAMS-RT是美国Qualtech系统公司开发的一个基于图模型的实时故障诊断工具。TEAMS-RT利用图模型表示被诊断系统中故障源和测试点之间的因果关系,通过阈值判断、模型一致性检验、趋势分析等手段获得各个测试点处的测试结果,然后根据当前的测试结果识别出好的部件、坏的部件和可疑的部件。TEAMS-RT已经在NASA的国际空间站任务控制中心和深空栖息地项目[50]、TacSat-3卫星的飞行器系统管理项目中得到了应用[47]。
近年来,美国开始将一些前期研究成果集成起来,构造更为全面的故障诊断与健康管理系统。例如,NASA针对下一代载人航天器开发的高级提醒与警告系统中综合使用了TEAMS-RT、IMS和HyDE三种诊断工具[51];美国空军研究实验室和NASA联合开发的TacSat-3卫星系统管理项目中把IMS、TEAMS-RT和基于规则的故障诊断专家系统SHINE集成到一起,构建了一个飞行器综合诊断系统[47]。
美国的航天器故障诊断技术项目与应用大多是从工程需求出发,不追求复杂的算法,而是研究具有实用价值的故障诊断技术并开发适合型号应用的原型系统。NASA Ames研究中心的IMS就是一个典型例子。IMS采用的算法很简单,就是对数据进行迭代学习,建立表征正常运行数据的聚类数据库(基本流程如图1所示)。这一简单有效的算法近年来得到了广泛的重视和应用。另外,在航天器故障诊断技术的研究过程中,NASA也逐渐建立起一些技术验证平台和测试数据集,例如NASA Ames研究中心的电源故障诊断平台ADAPT。NASA将相关技术成果应用于实际航天器测试平台进行技术验证甚至通过飞行试验进行验证,是提高航天器故障诊断技术成熟度的一个重要途径。
三是培养种子教师,学校社区巡讲。金牛区从各个学校确定了110名骨干教师,成立了儿童阅读指导种子教师队伍。这些种子教师,在学校和社区指导儿童阅读,到各校、各社区巡回演讲,带动和影响其他教师,推动儿童阅读遍地花开。
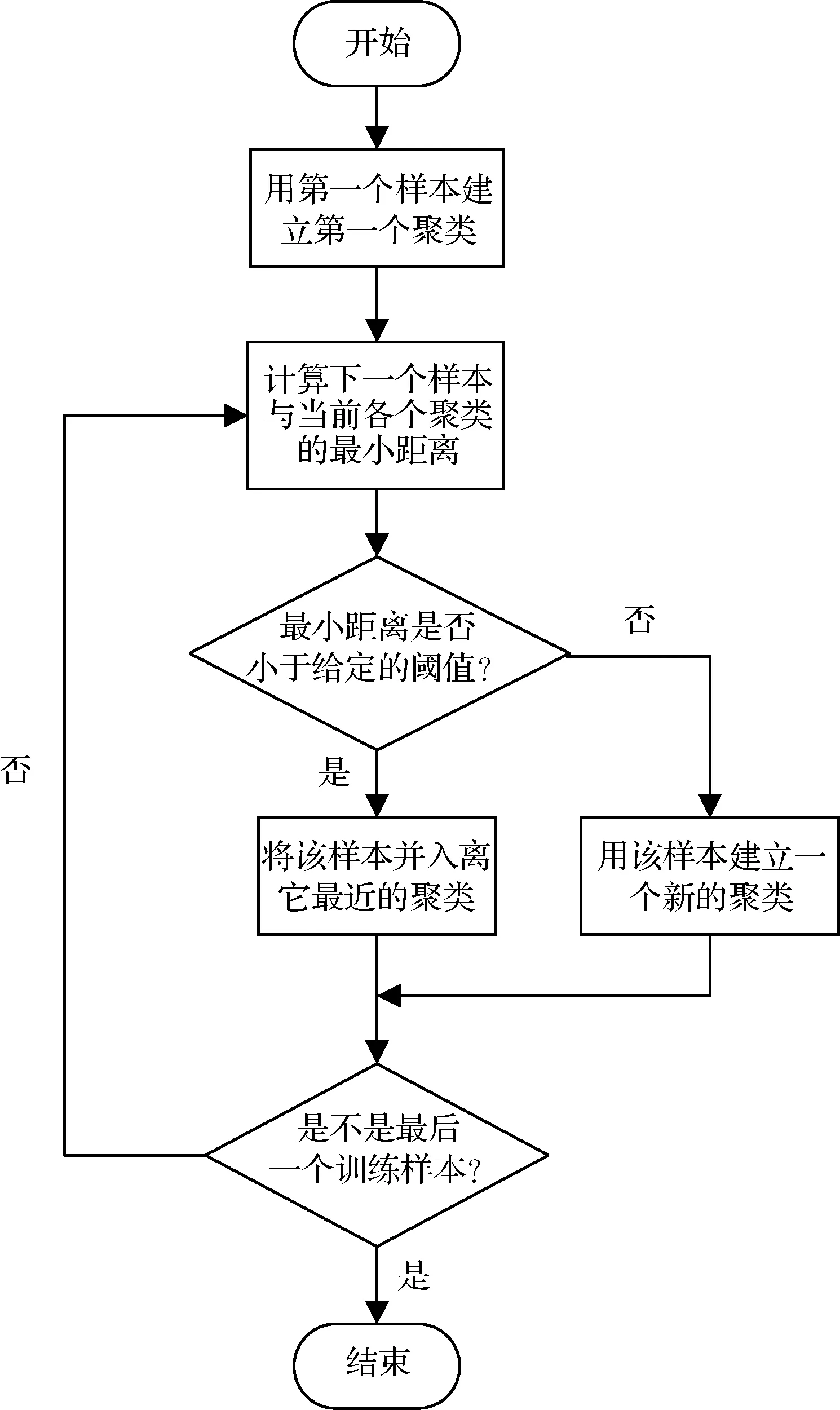
图1 IMS算法流程图Fig.1 The flowchart of the IMS algorithm
3.2 欧洲的相关项目研究与应用情况
欧空局的很多航天器,例如地球观测卫星GOCE和CryoSat、深空探测航天器Rosetta和火星快车(Mars Express)等航天器都采用了层次型故障诊断与重构结构,将故障诊断与重构任务分为5层(如图2所示)。星上故障诊断软件通常负责第2层和第3层的故障诊断与重构任务,第4层和第5层的故障诊断任务通过硬件诊断和重构来完成[52]。虽然欧空局有不少航天器应用了故障诊断与重构技术,但目前专门介绍欧洲航天器故障诊断技术应用方面的公开文献还比较少。
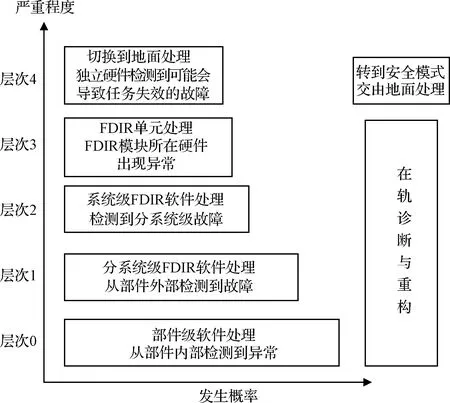
图2 欧空局使用的层次型FDIR系统Fig.2 The hierarchical FDIR system used by European Space Agency
SMART-FDIR是欧空局资助开发的一个星载故障诊断软件系统[53],旨在研究人工智能技术在提高星载FDIR软件的实时性、鲁棒性以及自动学习和决策能力方面的价值。SMART-FDIR分为检测、识别和恢复三个部分。其检测部分采用了基于时间序列的建模技术、模糊归纳推理方法,以及残差和包络分析方法;辨识部分结合了基于模型的框架和概率逻辑理论;恢复部分采用了基于有限状态机的重构方法。SMART-FDIR软件原型在GOCE卫星的仿真系统上进行了技术校验。
自主诊断系统(Autonomous diagnosis system,ADIA)是德国维尔茨堡大学针对纳卫星开发的一个基于专家系统技术的在轨自主诊断系统。在ADIA的基础上,维尔茨堡大学进一步推出了ADIA扩展版本ADIA++[54],其目的是得到一个通用的、能够自动生成诊断知识的系统。与最初的ADIA系统相比,ADIA++不需要手动生成诊断知识,而是可以根据卫星的模型软件自动生成。ADIA++系统的基本原理是通过对比仿真系统的输出和实际系统的测量值生成冲突集,然后通过故障推理得到最小故障部件集合,作为最可能的故障成因。ADIA++系统将在纳卫星SONATE上进行在轨验证。SONATE卫星已于2019年7月发射,ADIA++系统是SONATE卫星验证的两项关键技术之一。
虽然SMART-FDIR是欧空局资助的项目,但是后来并未得到飞行验证。ADIA是目前已经进行飞行验证的故障诊断系统,但是其并非欧空局资助的项目。从公开的文献来看,欧空局的航天器在轨故障诊断与重构技术多采用层次型结构,在新技术的研究与应用方面比NASA要相对保守。
3.3 中国的项目研究与应用情况
中国也非常重视航天器故障诊断技术的研究与应用。早在20世纪90年代,北京控制工程研究所就开发了一个卫星控制系统地面实时故障诊断专家系统SCRDES,有效提高了地面故障诊断的自动化程度。哈尔滨工业大学的丁彩红等[55]在航天器故障诊断专家系统方面也做了很多实用性的工作。当前中国的航天器型号已经不同程度地实现了在轨故障诊断与重构。例如,“环境减灾-1A、1B”卫星能够利用星上的硬件冗余和解析冗余实现对动量轮、陀螺、地球敏感器、太阳敏感器等部件的故障诊断,并且可以进行系统级的安全重构[56]。
文献[4]指出,中国新一代对地观测卫星和飞船等型号任务中的故障诊断与容错控制技术已经能够达到星上部件冗余充分、地面干预能力强、具有在轨修改应用软件的能力、星上控制计算机具有系统及部件的故障检测和自主切换能力、可实现部件级和系统级的故障诊断与自主切换功能。由此可见,中国的航天器故障诊断技术应用情况和欧洲的差距不是很大。但是,与美国的航天器故障诊断技术应用相比,中国的航天器故障诊断技术研究还有较大的差距,主要存在着理论研究与型号需求不匹配、实际应用的技术相对比较保守、缺乏相关的技术探索与验证项目(平台)等问题。
4 总结与展望
在过去的几十年里,航天器故障诊断与容错控制技术研究与应用取得了很大的进展,但是离深空探测需要的智能自主诊断与重构还有很大的距离。结合国内外航天器故障诊断与容错控制技术的研究现状,下述几个问题还需要进一步的深入研究。
当前的航天器研制过程非常重视可靠性分析与设计。实际上,故障的可诊断性和可维护性也是与系统可靠性和安全性有关的重要特性。为了提高航天器的可靠性和安全性,在航天器的研制过程中就应该考虑故障诊断与容错控制问题,把可诊断性和可维护性的理念融入到设计、制造和运行过程中,并利用可诊断性和可维护性对设计和试验进行反馈,而非在系统设计完成后再设计对策。如果在任务初期阶段对故障诊断性和可维护性的分析与设计不够重视,在后期的系统集成阶段可能会出现一些意想不到的开支和工作量。现代航天系统日益复杂,在设计初期就开始进行故障管理的设计非常重要,但这方面的研究还处于起步阶段,需继续深入研究。
2)航天器智能自主故障诊断与容错控制技术
航天器运行在恶劣的空间环境中,一些空间的环境变化可能会引发未知故障。例如,空间辐射可能会导致单粒子效应,从而引发一些关键电子器件的故障。另外,在飞行任务过程中,航天器自身的一些参数也会发生变化(例如燃料消耗、液体晃动、快速机动等)。但是由于航天器的地面干预能力有限,这些内部和外界的变化都会为航天器故障诊断与容错控制带来很大的挑战。另外,在航天器的实际工程应用中,对于整体系统的故障诊断和容错控制流程设计也是一个非常复杂的问题。这就要求航天器的故障诊断与容错控制系统具有高度的智能自主能力,能够在线、实时调整诊断与容错系统。因此,针对航天器自身参数或运行条件的变化,以及外界环境的影响,利用人工智能和自动化技术,提高航天器故障诊断与容错控制的智能自主能力,也是未来的重要研究方向之一。
3)面向工程应用的航天器故障诊断与容错控制技术
目前的航天器故障诊断与容错控制技术研究主要是单一方法的应用。无论是基于模型的方法,还是基于数据或者知识的方法,都具有其特定的局限性,例如基于模型的方法要求被诊断对象具有比较准确的数学模型,基于数据的方法需要充足的历史数据,基于知识的方法存在知识获取瓶颈。航天器是一个复杂的大系统,仅仅靠某一类方法处理航天器故障诊断与容错控制是非常困难的。另外,航天器故障诊断与容错控制的研究应该从实际出发,研究有效的解决途径。针对这些问题,如何合理地综合应用各类方法,提高航天器故障诊断的准确程度、增强航天器的容错性能、扩展航天器故障诊断和容错控制的应用范围,也是一个值得重点研究的方向。
4)航天器故障诊断与容错控制的技术验证
不同于一般的工业系统,航天器属于高度定制化的系统,这一特点也为航天器故障诊断与容错控制研究带来了一定的挑战。目前绝大部分航天器故障诊断与容错控制方面的工作都是理论研究,与实际工程应用还有很大的距离。地面验证是推动航天器故障诊断与容错控制技术走向工程实用的必要且重要的一环。目前的主要技术验证手段是通过蒙特卡洛仿真或建立相应领域的试验台,对故障诊断与容错控制方法进行验证与评价,这往往需要耗费大量的人力和物力。如何快速高效地对故障诊断技术进行性能评价,是一个值得重视的问题,但是在这方面,目前既缺乏系统的理论体系,也缺乏简便可行的具体方法,亟需对此开展研究。