航天器微低重力模拟及试验技术
2020-07-28齐乃明王耀兵刘延芳霍明英姚蔚然
齐乃明,孙 康,,王耀兵,刘延芳,霍明英,姚蔚然,高 鹏
(1. 哈尔滨工业大学航天学院,哈尔滨 150001;2. 北京空间飞行器总体设计部,北京 100094;3. 北京卫星制造厂有限公司,北京 100094)
0 引 言
人类航天活动近年来呈快速增长态势,为适应种类繁多的太空任务和科学研究,航天器的功能、结构越来越复杂,性能要求也越来越高[1]。航天器的相关地面试验是发射前的重要技术流程,基于微低重力模拟技术的航天器地面试验技术研究,是航天任务成功的重要保障。充分的高精度地面模拟试验能保证航天器在轨工作的性能和可靠性,有效提高航天器研发效费比,缩短研发周期。
地面重力场环境下的微低重力环境模拟是航天器地面试验的必备条件和关键性技术,直接影响航天器的总体研制水平[2-3]。航天器微低重力环境模拟可分为零重力模拟和低重力模拟两类。对于在轨运行的航天器,需模拟零重力环境;对于月球车、火星车等在其他星球运行的航天器,则需提供相对应的低重力模拟环境。基于地面重力场环境下的微低重力环境模拟技术,航天器的在轨运行、绕飞、逼近、抓捕、对接以及在地外天体环境下的任务执行等均可通过地面试验进行充分的考核和验证,特别是对于新型航天器和新的航天任务,可提高任务成功率,降低飞行试验费用。
本文将在微低重力模拟技术、气浮式多自由度模拟器技术、基于微低重力模拟的航天器地面试验技术的原理、特点和应用等方面展开分析,并对微低重力模拟及试验技术的发展前景及需要攻克的关键技术进行总结和分析。
1 微低重力模拟技术
根据微低重力模拟原理的不同,微低重力模拟技术可分为:体积力补偿、面积力补偿和点力补偿。其中,点力补偿根据补偿点个数的不同可分为集中点力补偿和分布式点力补偿。以上几种重力补偿技术的原理示意如图1所示。
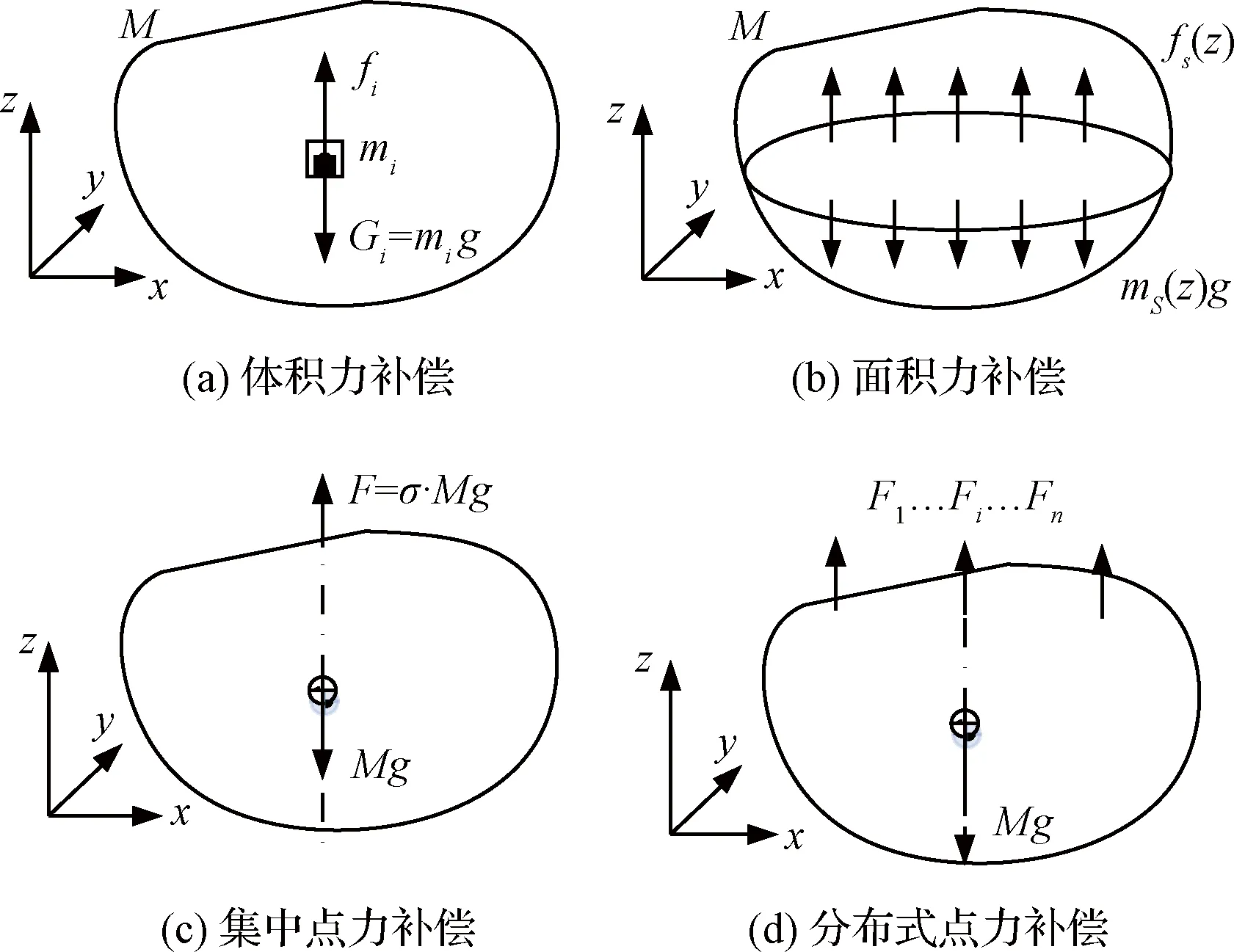
图1 微低重力补偿原理Fig.1 Micro/low gravity compensation mechanism
1.1 重力的体积力补偿
如图1(a)所示,体积力补偿指对于质量为M的物体,其内部任意质量单元mi所受到的重力Gi均存在对应的外部补偿力fi,且任意质量单元间无重力参与形成的内应力,其公式表述为
(1)
式中:fV(x,y,z)为任意位置补偿力,ρ(x,y,z)为任意位置的体密度,g为地表重力加速度。
典型的体积力补偿方法有落塔法和失重飞机法。美国、德国、日本和中国科学院力学所等均建造有微重力落塔,该方法补偿残差小于0.01%[4],持续时间约为几秒,试验成本较高;美国、俄罗斯、欧空局、日本及中国利用失重飞机进行了零重力环境模拟研究[5],试验时长在几十秒左右,重力补偿残差小于1%,模拟时长相比落塔法有所增加,但试验成本仍较高。
1.2 面重力补偿
面积力补偿是指物体浸入液体或气体中时,其外表面会受到分布力,物体的重力被这些分布力的合力在重力方向的分量补偿,从而实现物体的微重力补偿。如图1(b)所示,物体外表面上z高度位置的分布力合力在重力方向上的分量为fs(z),施力表面在重力方向z上的投影为S,则公式表述为
(2)
液浮法是具有代表性的面积力补偿方法。此方法将试验对象(人或设备)放入充满液体介质(一般为水)的模拟装置中,利用浮力补偿设备重力从而实现微重力补偿。美国马里兰大学Ranger系统[6]、哈尔滨工业大学和中科院智能机械研究所的水浮法零重力模拟系统[7]。液浮法的优点是补偿力施加均匀,试验时长不受限,但设备需做专门密封,设备的运动也会受黏滞阻力和紊流等影响,动力学模拟精度较低。
1.3 重力的点力补偿
该方法是在物体的某一点(或局部位置)施加外力(拉力或支撑力)实现物体重力的全部或部分补偿。根据施力点个数的不同,点力补偿分为集中点力补偿和分布式点力补偿两类。
1)集中点力补偿
如图1(c)所示,集中点重力补偿指通过单个连接点提供大小为F的拉力或支撑力来补偿质量为M的重力,设σ为重力补偿因子,0≤σ≤1(如模拟月球低重力环境,取σ=5/6),则公式表述为
F=σ·Mg
(3)
2)分布式点力补偿
(4)
悬吊法属于提供拉力的点力补偿方法。美国卡耐基梅隆大学研制的SM2试验系统[8-9]、美国载人月球车重力补偿系统[10]、前苏联Marsokhod火星车试验系统[11]、中国“玉兔号”月球车试验系统[12]和中科院智能机械研究所悬吊零重力补偿系统[13]均属于集中点重力补偿技术的应用;李煜琦等[14]对基于分布式多点吊丝配重法的空间机械臂卸载效率进行了研究,给出了单个吊索的卸载率与系统整体卸载率的判定方法。悬吊法应用较为简单且易实现,但存在传动摩擦大、绳索蠕变及运动滞后等缺点。
气悬浮法属于提供支撑力的点力补偿方法,利用较为普遍。美国斯坦福大学[15-16]、日本东京理工大学[17],中国运载火箭技术研究院、中国空间技术研究院、上海航天技术研究院、国防科学技术大学和哈尔滨工业大学[18]等单位均研制了多种类型气悬浮微低重力试验系统。气悬浮法具有零重力模拟精度高、试验时长不受限、无噪音、无污染和重复试验能力强等特点,在微重力模拟试验中应用广泛。
1.4 微低重力补偿技术及应用特点
上述对体积力、面积力和“点”力三种类型的重力补偿原理进行了分析。实际工程应用中,微低重力补偿技术通常组合使用,特别是气悬浮支撑与悬吊法的组合应用最为普遍。表1为上述各种微低重力补偿技术的应用特点。

表1 各种微低重力补偿技术特点Table 1 Characteristics of various micro/low gravity simulation technologies
2 气浮式多自由度模拟器技术
气悬浮技术的良好特性,使其在模拟物体微重力环境下的多自由度运动试验领域得到良好应用,形成了气浮式多自由度模拟器技术。该技术能有效考核控制算法及有效载荷的效能,动力学仿真的保真度更高。根据模拟自由度的不同,多自由度模拟器技术可分为平面三自由度零重力模拟技术、姿态三自由度零重力模拟技术和竖向零重力补偿技术三类,三类零重力模拟技术可根据试验要求组合使用。图2为多自由度零重力模拟器技术实现的原理图。
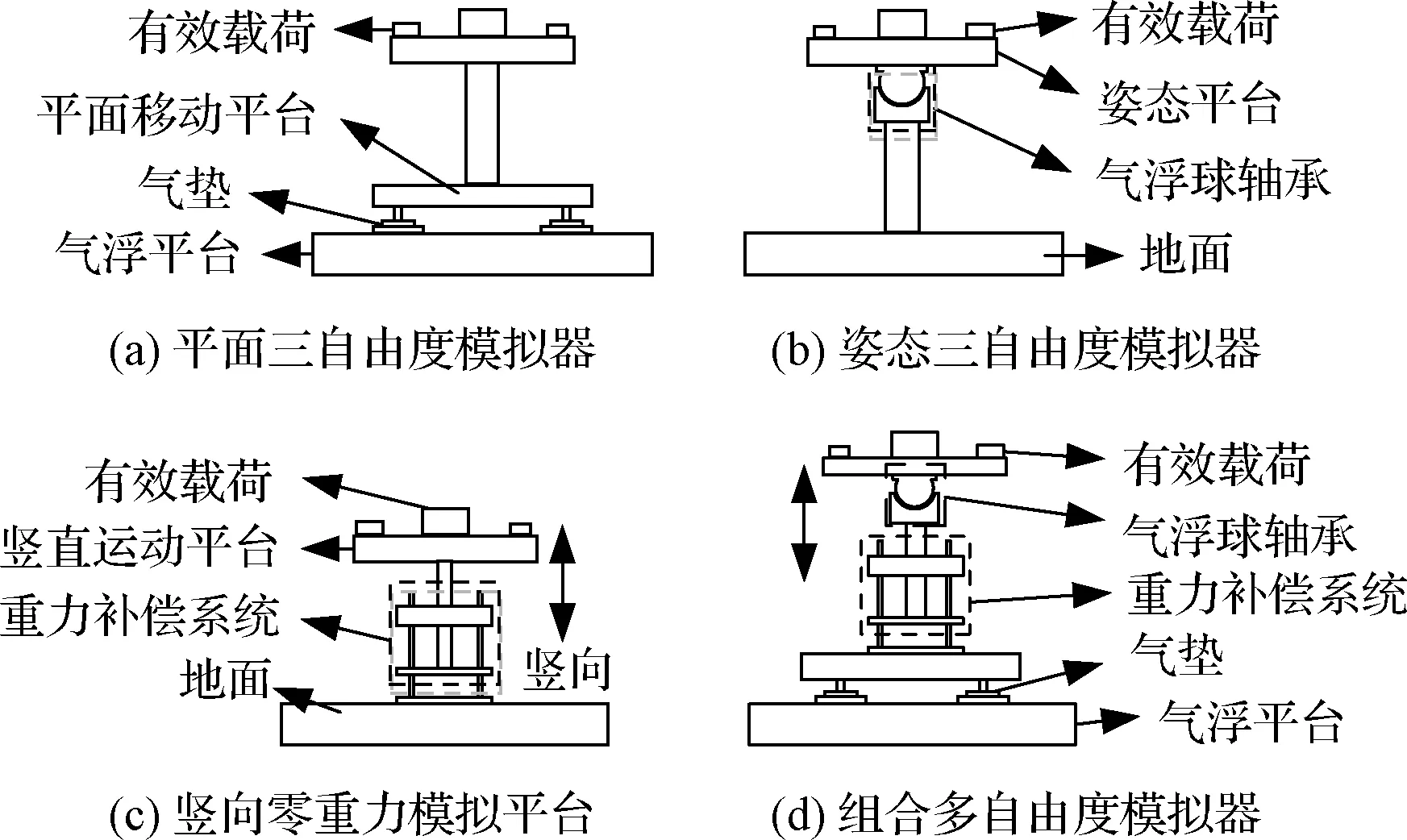
图2 零重力模拟平台Fig.2 Zero gravity simulator
2.1 平面三自由度零重力模拟技术
如图2(a)所示,平面三自由度零重力模拟平台通过气垫与气浮平台配合形成气膜,产生支撑力补偿平台重力,实现平台二维位置及偏航三个平面自由度的无摩擦运动。平面三自由度模拟器对于验证航天器的编队飞行策略、绕飞、目标接近及捕获等在轨飞行任务具有较好的地面演示验证能力。
霍明英等[19]研制了三套平面三自由度模拟器,三组模拟器通过多组平面止推气垫实现分布式点重力补偿,与气浮平台间形成气膜,实现在气浮平台上的无摩擦平面三自由度运动。曲春成[20]利用三自由度零重力模拟器分别对空间机械臂的肩、肘、腕三部分进行重力补偿,实现了机械臂在气浮平台上的无摩擦平面运动。
2.2 姿态三自由度零重力模拟技术
从国内外研究情况来看,美国维吉尼亚理工大学[21-23]研制了Whorl-I和Whorl-II两套三轴卫星模拟器;美国海军研究生院[24-25]研制了一套三轴姿态模拟器,用于空间激光束的发射、对准及接收等地面试验;佐治亚理工大学[26-27]研制了一系列三轴姿态模拟器,用于姿态控制算法研究。哈尔滨工业大学研制了一套三轴姿态模拟器和一套变惯量三轴姿态模拟器,其中变惯量姿态模拟器通过构型设计和配重布局模拟不同转动惯量的航天器,用来测试卫星模拟器姿态控制算法的适应能力[28]。
2.3 竖向零重力补偿技术
竖向零重力补偿技术是微低重力补偿中的瓶颈技术,也是实现六自由度模拟器的核心技术。如图2(c)所示为竖向零重力补偿技术的原理图,利用重力补偿系统抵消竖向运动平台的重力,实现航天器在地球重力场环境下的竖向自由运动。该项技术的实现需解决摩擦、高动态响应、承载能力等技术难题。
国内外学者针对竖直方向零重力补偿技术进行了诸多研究:美国喷气推进实验室(JPL)设计了一套重力补偿装置,利用恒力气缸作为主承力部件,利用电动机构补偿残余重力,技术上首次实现了竖直方向自由度的零重力模拟,但气动补偿方式存在补偿力波动明显、耗气量大和高动态响应慢等缺点。美国伦斯勒理工学院[29-31]通过被动力平衡法补偿了姿态模拟平台的重量,竖向重力补偿系统采用径向气浮轴承滑轮组,减小传动摩擦,提高了零重力补偿精度。徐永利等[32]设计了一套竖直方向恒力补偿装置,该装置利用主动悬吊法补偿机械臂的重力,并利用二维直线运动单元主动跟随机械臂运动,保证吊丝拉力方向的竖直;哈尔滨工业大学飞行器机电一体化中心独立研制了一套竖向恒力系统,如图3所示,其利用恒力弹簧和解析构型“刀式”凸轮等机构被动补偿姿态平台的重力,动态响应速度快;在此基础上,又通过一套主动电机补偿机构,消除重力补偿残差,使重力补偿精度高于98%,兼顾了高动态响应和高补偿精度。
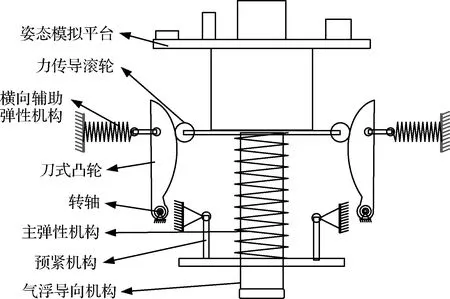
图3 竖向恒力系统结构图Fig.3 Structure of vertical constant force system
2.4 多自由度零重力补偿技术的组合应用
如图4所示,通过将平面、姿态、竖向零重力补偿技术组合运用,可实现航天器的五自由度模拟和六自由度模拟。其中,五自由度模拟包含平面运动自由度和三轴姿态自由度;六自由度模拟包含平面、三轴姿态和竖直方向自由度。
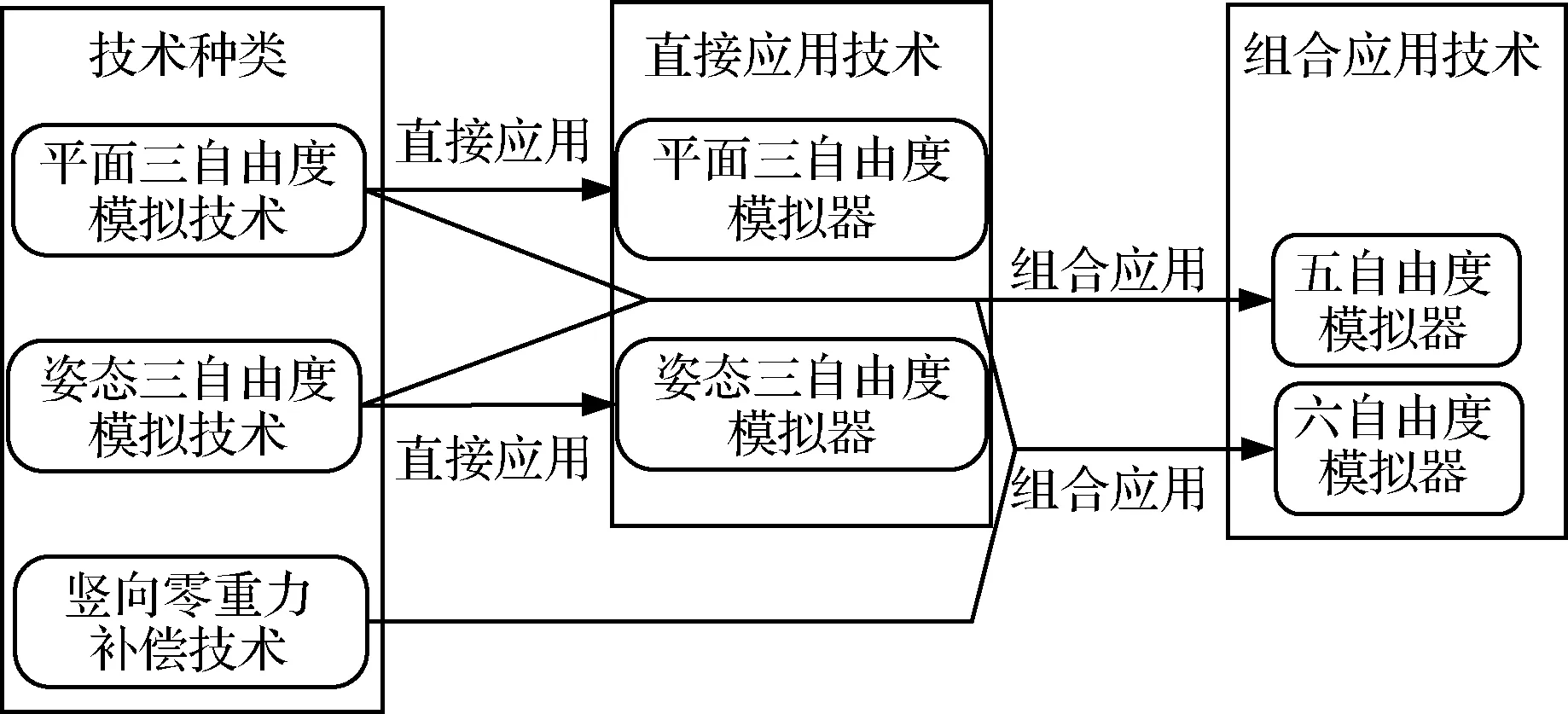
图4 多自由度零重力模拟技术组合应用框图Fig.4 Combined application of multi-DOF simulator
国内外学者针对多自由度零重力补偿技术的组合应用进行了诸多研究。佐治亚理工学院将姿态平台放置于环氧树脂移动平台上,研制出一套五自由度模拟器[33];JPL研制了两套五自由度卫星模拟器,用于研究卫星编队飞行策略和控制算法[34-35]。Xu等[36]研制了一套五自由度卫星模拟器,组合利用气垫和气悬浮球轴承实现航天器的五自由度零重力模拟;哈尔滨工业大学机电一体化研究中心近年来研制了多套五自由度模拟器,用于航天器的姿态控制、交会对接、绕飞逼近和在轨加注等地面试验。此外,美国JPL、伦勒斯理工学院[29-31]和国内的国防科技大学、哈尔滨工业大学等分别将研制的竖向重力补偿技术与五自由度模拟器技术结合应用,研制了六自由度航天模拟器。
3 基于微低重力模拟技术的航天器地面试验技术
充分的地面试验有利于提高航天器在轨运行的可靠性及执行任务的成功率,也是新技术能否具备实际在轨应用条件的重要考核手段。
Yu等[37]对基于计算机和地面物理设备的半实物物理仿真试验研究进展进行了调研;刘茜等[38]基于硬件在环技术将机械臂动力学模型与真实机械臂进行了软硬件结合,搭建了一套半物理仿真系统;卢威等[39]建立了载人航天器密封舱的数值模型并与地面物理试验系统的试验结果进行比对。文献[37-39]分别构建了航天器的半物理试验平台和将数字模型与物理模型进行了对比分析,但未能全面模拟航天器的真实在轨力学环境。曹喜滨等[40]基于气浮平台搭建了卫星编队飞行物理试验系统,研究了编队过程的相对导航、制导控制和星间通讯等问题;翟坤等[41]搭建了地面物理试验系统,考核非合作航天器的相对姿态确定算法;孙施浩等[42-43]利用相似理论设计了一种能等效替代空间合作目标绝对运动和翻滚目标姿态运动的方法,并给出航天器交会对接过程的地面物理实验方案;刘冬雨等[44]针对空间机械手臂的在轨精细操作任务搭建了地面物理仿真试验平台,并解决了天地重力差异带来的误差影响;李振宇[45]针对空间站来访目标的悬停捕获任务,设计了一套地面物理仿真系统,并基于气浮平台做了机械臂的跟踪捕获试验;李扬等[46]针对空间碎片的接近和捕获任务的地面试验技术进行了系统分析和总结;Yao等[47]基于气浮台和气悬浮支撑技术构建了一套机械臂地面试验系统,用于研究重力场环境下机械臂的动力学响应与真实在轨状态的差异。上述文献[40-47]针对在轨任务搭建了地面全物理试验平台,相较于纯数字仿真及半物理仿真试验,全物理仿真试验对航天器的功能、性能考核更加全面和准确。
通过筛分试验,安顺煤矿粉煤中约有10%的1cm以上颗粒,2018年上半年粉煤总量26万吨,即约有2.6万吨1cm颗粒进入粉煤中。按照粒煤平均价格高于粉煤324元计算,上半年此项的损失在840万左右。
3.1 空间机械臂高精度装配及零重力试验技术
空间机械臂具有灵巧性高、质量轻、负载重和操控能力强等特点,在空间操控任务中被广泛应用。美国轨道快车计划[48]、FREND/SUMO计划[49]、凤凰计划[50]、日本工程试验卫星-7计划[51]以及国际空间站的建造、维护等均采用了空间机械臂作为操控工具。中国也正在研制大型空间机械臂,用于未来空间站的建造和维护,哈尔滨工业大学参与了针对大型空间机械臂的零重力装配及试验一体化系统的研制和试验。
如图5所示为大型空间机械臂地面高精度零重力装配及试验系统原理图。机械臂跨距长、自由度多、整体刚度弱,给地面的零重力装配和试验提出了很大挑战。利用分布式点力补偿原理实现机械臂整体的零重力补偿,每个重力补偿点均由微调机构、力测量系统以及平面三自由度模拟装置组成。根据基准测量系统和可视化力测量系统,分别提供基准和补偿力的误差信息指导微调机构的调整,实现补偿力误差和基准误差均满足装配要求。
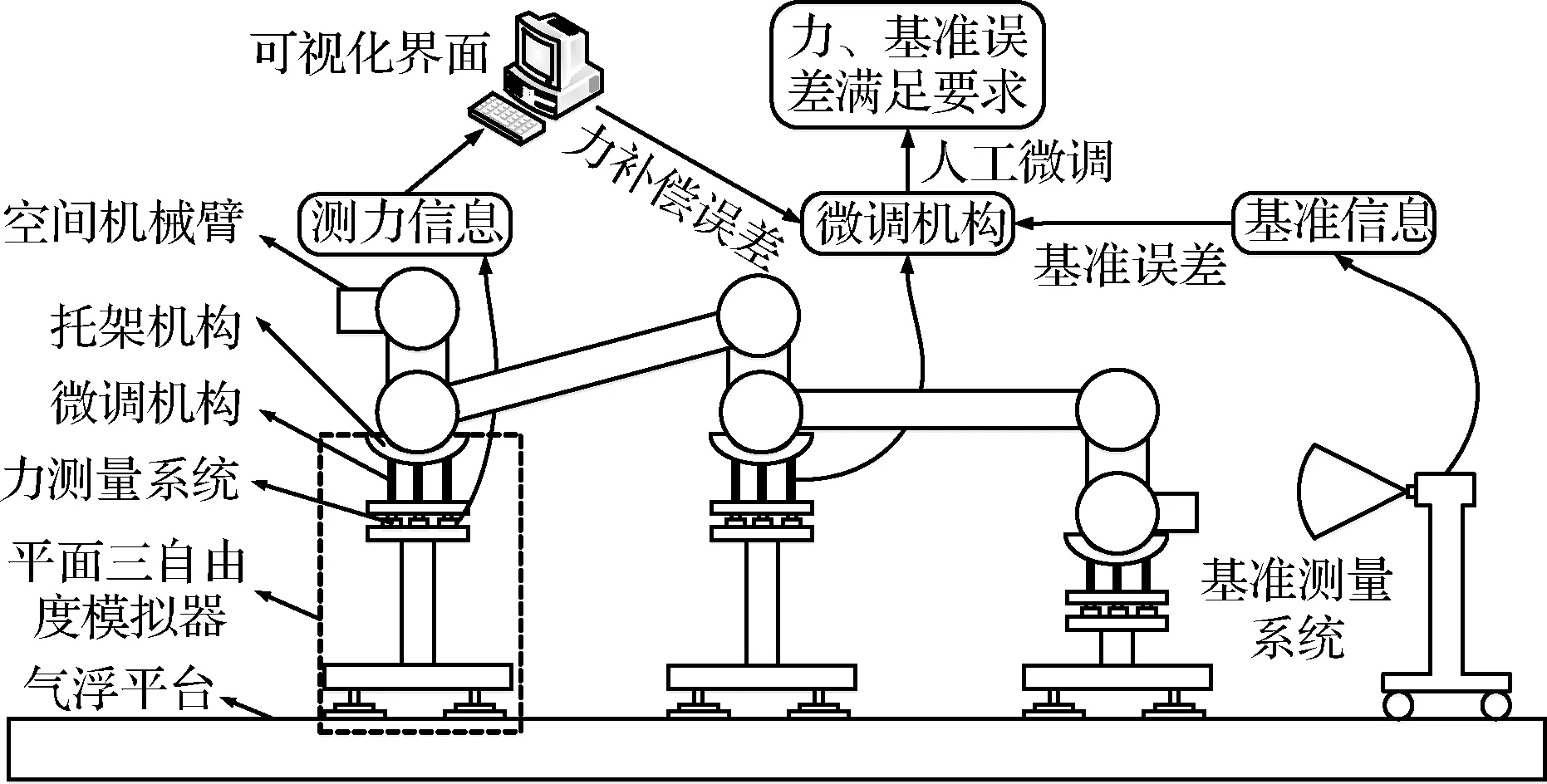
图5 空间机械臂地面零重力装配及试验系统原理图Fig.5 Ground zero-gravity assembly and experiment system for space manipulator
1)高精度基准测量技术。精确的位置和姿态测量是实现大型空间机械臂高精度装配的基础。通过外部激光、视觉等方案确定关节基准,为微调机构操作提供基准数据支持。
2)重力补偿测量和可视化技术。每个独立组件(机械臂关节、臂杆等)通过测力装置与微调机构一一对应连接,实现对独立组件的多点实时测量;可视化力监测界面可实现对每个独立组件的重力补偿效率的实时监控。通过多组测力装置的组合使用,对独立组件间的应力传递情况进行监测,对超限部位通过微调加以复位。
3)高精度微调技术。大型空间机械臂的独立组件支撑结构具有微调环节,可实现分布式零重力补偿和到位锁定。根据基准和补偿力测量信息实现相邻组件间的六自由度实时微调,保证装配的水平度和同轴度等基准指标。
4)地面零重力试验技术。基于零重力装配及试验一体化系统和气浮平台,可实现大型空间机械臂在气浮台上的爬行、目标跟踪、目标抓捕以及模拟舱段转位和对接等试验,为空间机械臂的在轨操控技术提供物理验证,提高其在轨运行的可靠性。
3.2 航天器在轨重组、对准、编队及绕飞试验技术
应用多自由度零重力模拟器和气浮平台等地面物理试验平台,可实现航天器在轨重组、对准、编队飞行和绕飞等运动学路径规划技术的地面试验,并对航天器的控制算法和飞行策略进行试验验证。
1)利用两套平面三自由度模拟器可实现航天器在轨重组地面试验。其中一段为主动对接段,通过外部视觉相机获取与被动段的位姿偏差,利用冷喷气推力器等驱动组件实现主被动段进入捕获对接区域,由主动段捕获装置完成被动段的捕获、收拢及锁紧动作,完成对接重组。图6(a)为中国运载火箭技术研究院的多级航天器在轨重组地面试验系统,该系统能实现位置控制偏差小于1 cm,姿态控制偏差小于2°,单次试验时长小于2 min。
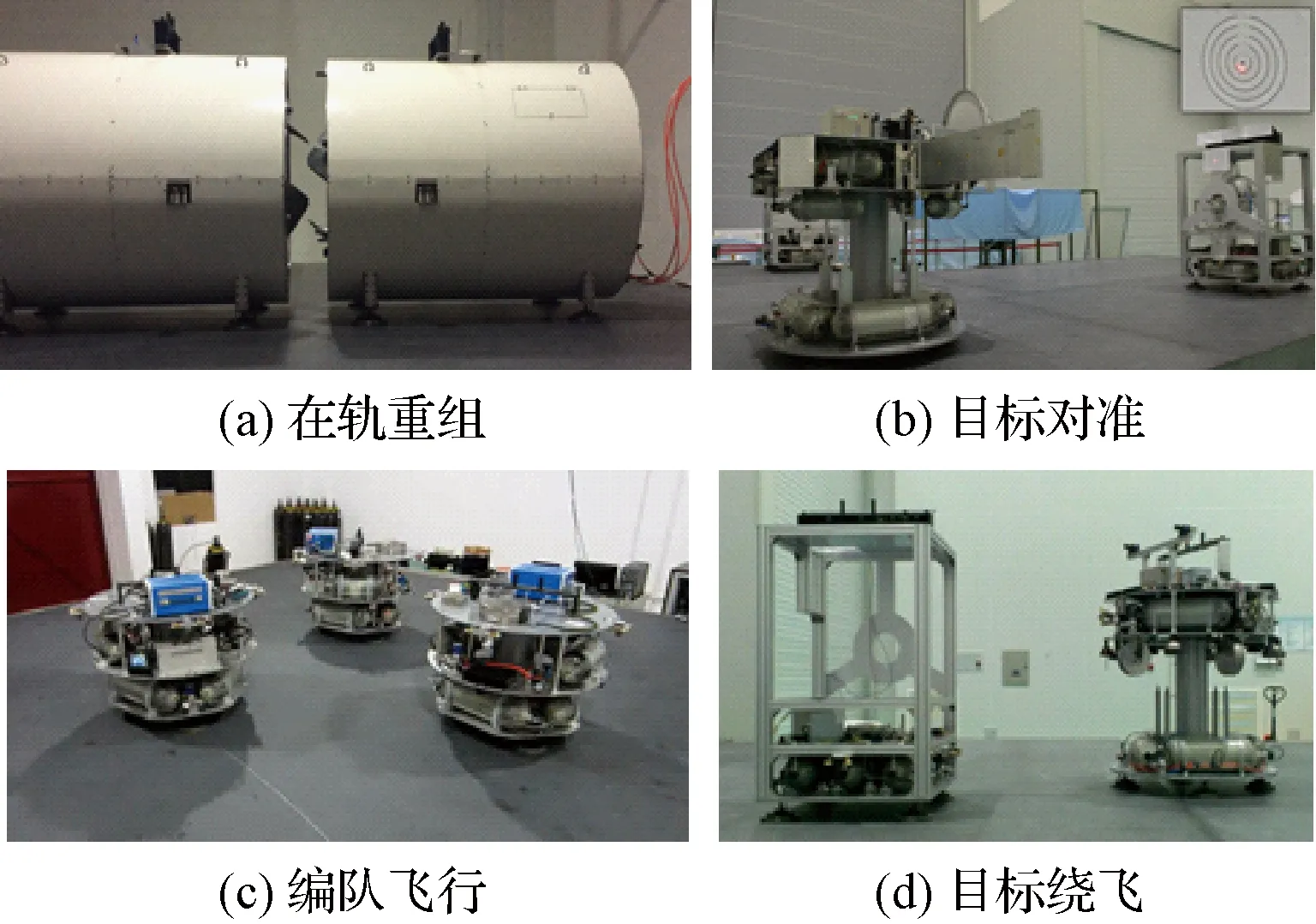
图6 航天器运动规划地面试验平台Fig.6 Ground testbeds for spacecraft kinematical planning
2)利用一套五自由度模拟器和一套平面三自由度模拟器可构建空间目标对准的地面试验系统。其中外部视觉测量系统给出五自由度模拟器与三自由度目标模拟器的相对位姿关系,利用冷喷气推力器、角动量飞轮等组件,驱动五自由度模拟器进行位置和姿态的机动,实现动态目标的实时跟踪对准。图6(b)为上海航天技术研究院的空间动态目标激光对准地面试验系统,该系统可实现动态目标优于1°的对准精度,后续可通过把目标升级为六自由度模拟器,实现对航天器姿态控制的全维度模拟。
3)卫星编队飞行试验系统可由多套三/五自由度模拟器组成,基于气浮平台硬件设施和气悬浮技术实现卫星模拟器的自由漂浮。通过冷喷气推力器、角动量飞轮等装置分别实现模拟器的位置和姿态机动,完成编队飞行构型。图6(c)为哈尔滨工业大学卫星工程技术研究所搭建的卫星编队飞行地面试验系统,该系统由三套平面三自由度模拟器组成,可对编队飞行控制算法和星间通信等进行相关研究。
4)绕飞试验系统可由一套五自由度绕飞模拟器和一套平面三自由度目标模拟器组成。五自由度模拟器通过外测手段或自带视觉相机,实现目标模拟器的位姿信息;通过冷喷气推力器和角动量飞轮分别实现相对位置和姿态的调整,实现对空间目标绕飞的地面试验。图6(d)为哈尔滨工业大学飞行器机电一体化中心基于模拟器技术和轨道缩比技术,搭建了空间目标绕飞地面试验系统,开展了视觉信息解算、位姿控制算法以及目标动态跟踪策略等试验检验。
3.3 航天器分离和捕获试验技术
航天器的在轨分离和捕获技术是空间操控任务的重点研究方向,利用多自由度模拟器技术和地面物理试验平台,可对上述过程的动力学响应以及控制算法的有效性进行地面试验验证。
1)图7(a)为上海航天技术研究院研制的航天器弹射分离试验系统。基于气浮平台,系统利用两套平面三自由度模拟器分别实现了航天器两级在零重力环境下的分离过程模拟,并通过分离过程的力的采集和分析,研究了分离动力学特性。
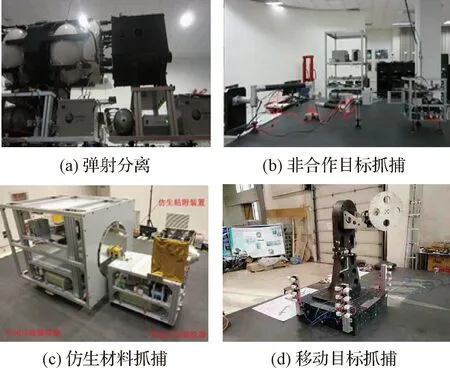
图7 航天器分离和目标捕获试验平台Fig.7 Separation and capture testbeds of spacecraft
2)图7(b)为航天工程大学研制的非合作目标机械臂抓捕试验系统。该系统利用气悬浮装置,实现抓捕机械臂的分布式支撑,利用平面三自由度模拟器实现了非合作目标的零重力模拟。该系统可用于考核机械臂的自主路径规划算法以及对非合作目标的抓捕能力。
3)图7(c)为上海航天技术研究院研制的仿生材料抓捕地面试验系统。系统由两套平面三自由度模拟器组成,在捕获模拟器前端安装仿生材料,对目标实施黏附抓捕。该系统利用气悬浮技术消除了重力在捕获过程中的影响,较好地测试了仿生材料的粘附特性在目标抓捕中的应用。
4)图7(d)为中国空间技术研究院研制的空间移动目标模拟器。该装置通过冷喷气推力器提供推力实现模拟器水平运动,由步进电机驱动对接结构绕竖直轴做回转运动,实现了移动目标的平面三自由度模拟。通过该移动目标捕获试验系统,能开展空间操控机构对移动目标的跟踪、逼近和捕获等技术的地面试验,有效验证空间操控机构的自主路径规划算法和抓捕策略。
3.4 货物搬运、在轨加注及在轨装配地面试验技术
在轨服务技术近年来成为航天领域的研究热点,传统的航天器设计体系和试验方法越来越不无法满足在轨服务任务的多样性需求[52]。利用在轨服务技术,可实现航天器在轨维修、单元更换、超大型结构的在轨装配等任务[53]。航天器的微低重力和多自由度模拟器技术为在轨搬运、在轨加注、在轨装配和在轨维护等技术的地面物理仿真提供了可行的试验平台。
1)图8(a)所示为上海航天技术研究院研制的在轨搬运地面试验系统。该在轨搬运地面试验系统由两套平面三自由度模拟器组成。服务星模拟器安装有操作机构,对处于自由漂浮状态的目标星模拟器进行货物搬运,主要用于考核操控机构的路径规划以及动力学控制算法。
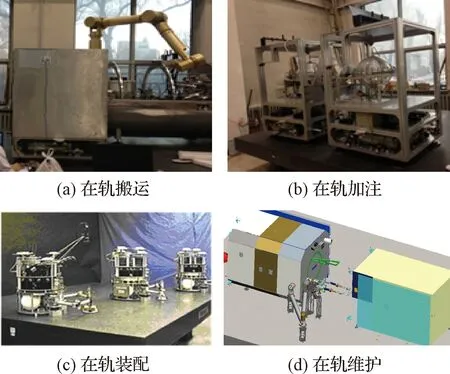
图8 在轨服务地面试验平台Fig.8 Ground testbeds of on-orbit service technology
2)图8(b)所示为上海航天技术研究院研制的在轨加注地面试验平台。该平台由两套平面三自由度模拟器组成。主动端通过捕获机构完成与目标的对接,然后加注机构再实现对接,完成对目标航天器的燃料加注任务,验证在轨对接及加注过程的全流程考核。
3)图8(c)所示为美国斯坦福大学研制的在轨装配地面试验系统[54],该系统由三套平面三自由度模拟器搭建。每组模拟器均预先安装标准对接口,由对接机构完成顺序组装,实现空间大型机构在轨装配过程的地面演示验证。
4)图8(d)所示为中国空间技术研究院研制的在轨维护地面试验系统,该系统由服务星、目标星、空间机械臂和灵巧操作双臂等组成。通过分布式气悬浮支撑技术分别实现了空间机械臂和灵巧操作双臂的零重力补偿,并使服务星和目标星在气浮平台上处于自由漂浮状态。该系统开展了服务星对目标星的捕获、锁定、星上单元更换以及辅助太阳帆板展开等全流程地面试验。
3.5 宇航员训练技术
宇航员训练的关键在于精确模拟其所处微、低重力场的真实力学环境以及任务执行场景。
1)地球轨道力学环境模拟训练。利用失重飞机法可实现宇航员的高精度零重力模拟,使宇航员短时间内处于真实的零重力环境,身体和心理感受最为真实;若进行长时间的模拟训练,可通过悬吊法或气浮支撑法集中补偿宇航员的重力从而模拟失重力学环境,训练时长不受限制,可有效降低宇航员训练成本。但由于无法完全模拟宇航员真实的失重状态,宇航员的身体、心理感受与实际情况均存在差异。
2)地外天体力学环境模拟训练。宇航员登陆月球或未来登陆火星等地外天体时,通常处于低重力状态,需利用低重力环境模拟技术开展训练。如通过悬吊法调整补偿力的大小,使宇航员所受合力为地球重力大小的1/6(模拟月球引力)、3/8(模拟火星引力)等,精确模拟地外天体的力学环境,可使宇航员的训练更加真实、有效,对宇航员未来登陆地外天体执行任务提供训练保障。
4 微低重力模拟试验技术的未来前景
航天器功能复杂性的不断增加,以及性能和精度指标的不断提高,对航天器的力学环境模拟以及地面试验技术提出了新的挑战。为适应未来更加复杂的航天任务,航天器微低重力模拟和试验技术需要不断的技术进步,需要在以下几个研究方向突破现有技术的瓶颈:
1)高精度:现有微低重力模拟技术已基本满足试验需求,但由于传动摩擦、管路干扰、驱动力输出变化、装配精度等外界干扰,模拟精度与航天器的真实在轨力学环境仍有偏差,需通过结构、传感、控制的精密协同,进一步提高补偿精度。
2)大承载:现有微低重力模拟和试验技术的承载能力可覆盖从公斤级到吨级的重量范围。随着航天技术的不断发展,超大、超重型航天器的地面模拟试验对试验技术的承载能力提出新的挑战,几十吨至百吨重量级的载荷模拟技术问题亟待解决。
3)高动态模拟:当前航天器的微低重力模拟和试验主要集中在静态、准静态及可预知变化的工况,对于未来航天器试验涉及的构型、质心、运动参数等频繁变化的试验工况,仍需通过技术手段的不断发展给予逐步解决。
4)变质量特性参数航天器试验:目前的航天器地面试验,未能完全真实反映航天器在轨运行和任务执行过程中航天器的燃料消耗、部组件更换以及执行机构的构型变化等引起的质量、质心和惯量变化情况,必须深入开展变参数微低重力模拟技术的研究以适应这种需求。
5)其他应用场景:微低重力模拟和试验技术的应用范围目前主要集中在航天器的各种地面模拟试验方面。未来可通过技术挖掘和有效转化,将零重力环境下的低摩擦、易于操纵和噪声低等优点,应用于产品移动、对接和操控等复杂、高精度装配任务,创造一种新型的零重力装配技术。
5 结束语
微低重力模拟和试验技术作为航天器研制任务的重要支撑技术,已成为航天工业部门必备的技术手段。航天器微低重力模拟和地面试验技术的不断进步,有利于充分验证航天器的功能、性能指标,利于提高任务执行的成功率,为未来更为复杂的航天任务提供高保真的试验手段。本文综述了多种微低重力补偿技术的原理,并分析了国内外在微低重力环境模拟和试验方面的研究进展;对多自由度零重力模拟技术的种类、原理、特点进行了介绍,归纳了多自由度模拟器的组合应用情况;对航天器微低重力模拟和试验技术的典型应用进行了较为全面介绍和分析;最后,对微低重力模拟技术未来发展需要攻克的关键技术及进行了梳理和总结。